【NLP】LSTM总结记录
目录
前言
RNN
梯度消失和梯度爆炸
梯度裁剪
relu、leakyrelu等激活函数
Batch Normalization(批规范化)
残差结构
LSTM(长短期记忆网络)
LSTM形式
理解LSTM结构
梯度爆炸和消失的解决
pytorch中的LSTM
参数的估计
GRU
前言
如果有一天,你发现有大佬会看你写的东西,你会感觉一切的一切都变得有意义吗?好比一个资质极差的凡人,终于发现自己可以凭借后天的极限奋斗,能有希望入道成仙,因而欢喜无尽呢?希望未来的那么一天,也有人会跟我说一句:吾道不孤也!借此文感谢boss上跟我聊过的这位大佬!
这篇文章写一些关于LSTM的总结。
RNN
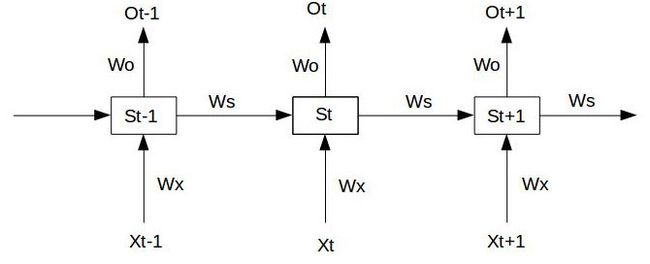
为了更加好的建模一些序列化信息,比如文本,语音,我们有了RNN(Recurrent Neural Network)。在绝大多数文章中,他长这个样子:

如上图所示,为什么他可以 建模序列化的信息呢?因为RNN每次都会将前一次的输出结果,带到下一次的隐藏层中,一起训练。前面所有时刻的输入都对未来的输出产生影响。
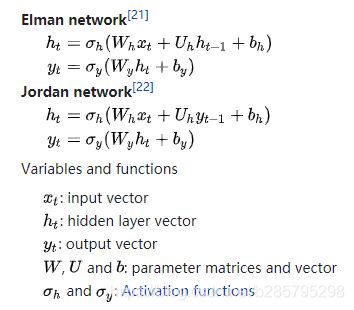
若 时刻隐藏层
时刻隐藏层 接受上一个时刻
接受上一个时刻 的隐藏层
的隐藏层 ,我们将这种RNN叫 Elman network,若 接受上一个时刻的输出
,我们将这种RNN叫 Elman network,若 接受上一个时刻的输出 ,我们称这种RNN叫Jordan network。【维基百科】
,我们称这种RNN叫Jordan network。【维基百科】
实际上,上面的图,不是很能辅助理解RNN的工作状态。借助一个例子,引自【知乎】。先看图:
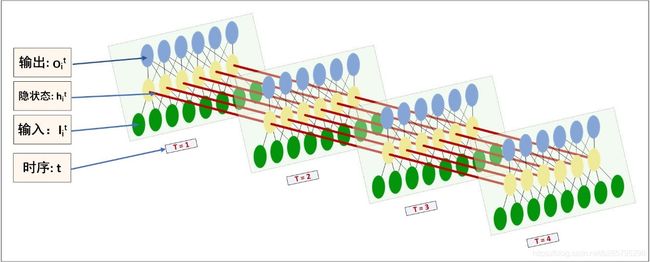
如果有一条长文本,我给句子事先分割好句子,并且进行tokenize, dictionarize,接着再由look up table 查找到embedding,将token由embedding表示,再对应到上图的输入。流程如下:
step1, raw text:
接触LSTM模型不久,简单看了一些相关的论文,还没有动手实现过。然而至今仍然想不通LSTM神经网络究竟是怎么工作的。……
step2, tokenize (中文得分词):
sentence1: 接触 LSTM 模型 不久 ,简单 看了 一些 相关的 论文 , 还 没有 动手 实现过 。
sentence2: 然而 至今 仍然 想不通 LSTM 神经网络 究竟是 怎么 工作的。
……
step3, dictionarize:
sentence1: 1 34 21 98 10 23 9 23
sentence2: 17 12 21 12 8 10 13 79 31 44 9 23
……
step4, padding every sentence to fixed length:
sentence1: 1 34 21 98 10 23 9 23 0 0 0 0 0
sentence2: 17 12 21 12 8 10 13 79 31 44 9 23 0
……
step5, mapping token to an embeddings:
sentence1:
 ,每一列代表一个词向量,词向量维度自行确定;矩阵列数固定为time_step length。
,每一列代表一个词向量,词向量维度自行确定;矩阵列数固定为time_step length。
sentence2:
……
step6, feed into RNNs as input:
假设 一个RNN的time_step 确定为  ,则padded sentence length(step5中矩阵列数)固定为 ,--这是句子的padding操作,一次RNNs的run只处理一条sentence。每个sentence的每个token的embedding对应了每个时序 的输入
,则padded sentence length(step5中矩阵列数)固定为 ,--这是句子的padding操作,一次RNNs的run只处理一条sentence。每个sentence的每个token的embedding对应了每个时序 的输入![]() 。一次RNNs的run,连续地将整个sentence处理完。
。一次RNNs的run,连续地将整个sentence处理完。
step7, get output:
看图,每个time_step都是可以输出当前时序 的隐状态![]() ;但整体RNN的输出
;但整体RNN的输出 ![]() 是在最后一个time_step
是在最后一个time_step ![]() 时获取,才是完整的最终结果。
时获取,才是完整的最终结果。
step8, further processing with the output:
我们可以将output根据分类任务或回归拟合任务的不同,分别进一步处理。
梯度消失和梯度爆炸
RNN模型训练的一大难题是梯度消失和梯度爆炸问题。产生梯度消失和梯度爆炸是由于RNN的权值矩阵循环相乘导致的。下面给出RNN梯度消失和爆炸的解释,该部分引自【《RNN梯度消失和爆炸的原因》-沉默中的思索-知乎】
我们拿一个三个时刻的序列处理过程来举例, 为给定值。
为给定值。
RNN最简单的前向传播过程如下:
假设在t=3时刻,损失函数为![]() 。
。
则对于这一次训练任务的损失函数为 。
。
使用随机梯度下降法训练RNN其实就是对![]() 求偏导,并不断调整它们以使L尽可能达到最小的过程。我们只对t3时刻的
求偏导,并不断调整它们以使L尽可能达到最小的过程。我们只对t3时刻的 ![]() 求偏导(其他时刻类似):
求偏导(其他时刻类似):
![]()
可以看出对于 ![]() 求偏导并没有长期依赖,但是对于
求偏导并没有长期依赖,但是对于 ![]() 求偏导,会随着时间序列产生长期依赖。因为
求偏导,会随着时间序列产生长期依赖。因为  随着时间序列向前传播,而 又是
随着时间序列向前传播,而 又是 ![]() 的函数。
的函数。
根据上述求偏导的过程,我们可以得出任意时刻对 ![]() 求偏导的公式:
求偏导的公式:
任意时刻对 求偏导的公式同上。
求偏导的公式同上。
如果加上激活函数,![]() ,则
,则

因为 ![]() ,如果中的值也是大于0小于1的值,则当t很大时 ,
,如果中的值也是大于0小于1的值,则当t很大时 , 接近于0.
接近于0.
如果中的值很大时,接近于无穷,这就是RNN中梯度消失和爆炸的原因。
梯度裁剪
避免梯度爆炸可以采用梯度截断的方法。所谓梯度截断是指将梯度值超过阈值的梯度降到阈值以内。虽然梯度截断会一定程度上改变梯度的方向,但梯度截断的方向依旧是朝向损失函数减小的方向。
from torch.nn.utils import clip_grad_norm
def clip_gradient(optimizer, grad_clip):
"""
Clips gradients computed during backpropagation to avoid explosion of gradients.
:param optimizer: optimizer with the gradients to be clipped
:param grad_clip: clip value
"""
for group in optimizer.param_groups:
for param in group["params"]:
if param.grad is not None:
param.grad.data.clamp_(-grad_clip, grad_clip)# 将梯度限制在(-grad_clip, grad_clip)内
我们还可以通过以下一些方法缓解梯度消失和梯度爆炸
relu、leakyrelu等激活函数
relu,在小于0的时候梯度为0,大于0的时候梯度恒为1,这样使得每层的网络得到的梯度更新速度都一样。
relu的主要贡献:解决了梯度消失和梯度爆炸的问题,计算方便计算速度快(梯度恒定为0或1)加速了网络的训练
但由于负数部分恒为0,导致一些神经元无法激活(可通过设置小学习率部分解决)且输出并不是零中心化的
leakyrelu就是为了解决relu的0区间带来的影响,在小于0的区间,梯度为很小的数(非零),leakyrelu解决了0区间带来的影响,而且包含了relu所有优点。
Batch Normalization(批规范化)
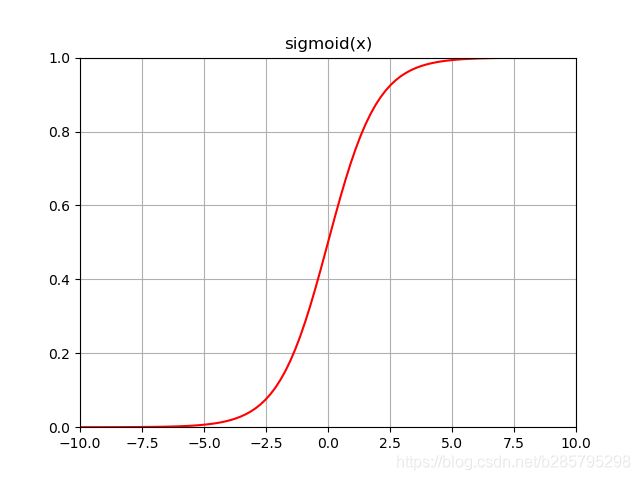
BN通过对每一层的输出归一化为均值和方差一致的方法,消除了 过大过小带来的影响,也可以理解为BN将输出从饱和区拉到了非饱和区(比如Sigmoid函数)。
残差结构
。。。
LSTM也是为了解决梯度消失或爆炸问题。换句话说,它可以解决RNN的长期依赖问题。再换句话说,他可以拥有较RNN更长的序列信息学习能力。
LSTM(长短期记忆网络)
而LSTM之所以能够解决RNN的长期依赖问题,是因为LSTM引入了门(gate)机制用于控制特征的流通和损失。
LSTM形式
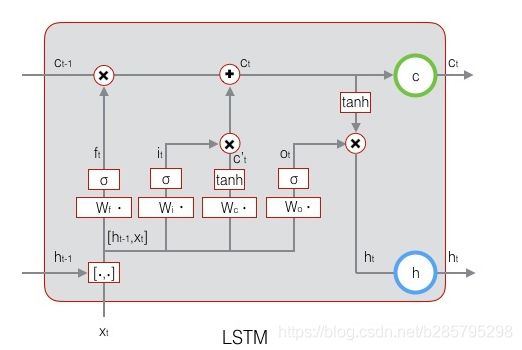
绝大部分文章中,LSTM长这个样子:
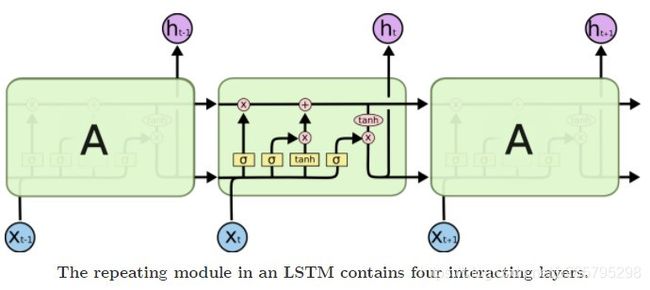
结合之前的RNN结构看,它说明了在每一个时刻,隐藏层都经过了几个特殊的运算(门的运算),然后将信息往后传递。每一个cell的具体信息如图:
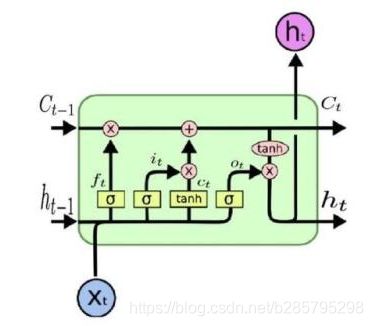
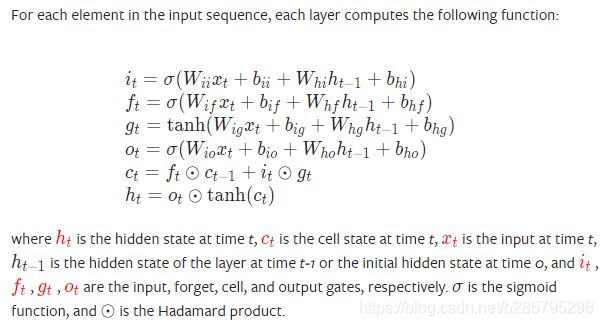
各个门(f:遗忘门,i:输入门,o:输出门)的计算方式如下:
理解LSTM结构
 称作”cell state“,他是让梯度随着时间的流动不发生指数级消失或者爆炸的关键。也是LSTM保持长期记忆的关键部件。我们之前分析了,传递过程中,隐藏层权重
称作”cell state“,他是让梯度随着时间的流动不发生指数级消失或者爆炸的关键。也是LSTM保持长期记忆的关键部件。我们之前分析了,传递过程中,隐藏层权重 值的变化是导致梯度消失或爆炸的原因之一。
值的变化是导致梯度消失或爆炸的原因之一。
考虑极端的条件,如果信息在传递过程中,不加以权重。那么我们可以用 ![]() 来输送信息,而无需考虑梯度的消失或爆炸。
来输送信息,而无需考虑梯度的消失或爆炸。
当然,我们不能单纯这样做,我们在 的基础上,进行每一个
的基础上,进行每一个![]() 的信息加减。具体来说,在 时刻,是用遗忘门
的信息加减。具体来说,在 时刻,是用遗忘门  与 前一个cell state 作Hadamard product(按元素相乘),然后用输入门
与 前一个cell state 作Hadamard product(按元素相乘),然后用输入门  与当前 cell
与当前 cell  作Hadamard product ,然后两者求和。
作Hadamard product ,然后两者求和。
我们发现,计算式中,遗忘门,输入门,输出门都是![]() 的拼接参与运算,然后用sigmoid激活, 是上一时刻的隐藏状态输出(短时记忆)。sigmoid的输出是在0-1之间的。这意味着,
的拼接参与运算,然后用sigmoid激活, 是上一时刻的隐藏状态输出(短时记忆)。sigmoid的输出是在0-1之间的。这意味着,![]() 的时候相当于将
的时候相当于将 的信息作了部分舍弃,我想这也就是他被称作"遗忘门"的原因。 同理
的信息作了部分舍弃,我想这也就是他被称作"遗忘门"的原因。 同理 ![]() 计算出需要有选择性增添的信息。两者求和,就完成了信息的忘记和增加。
计算出需要有选择性增添的信息。两者求和,就完成了信息的忘记和增加。
输出也是一样的,用 将当前的cell state 约束回
将当前的cell state 约束回![[0,1]](http://img.e-com-net.com/image/info8/de5eda5e79d94e8580b65b4053ab5162.gif) ,然后以
,然后以![]() 的方式进行有选择的输出。相当于对积累的记忆进行了挑选。
的方式进行有选择的输出。相当于对积累的记忆进行了挑选。
梯度爆炸和消失的解决
还记得之前RNN反向传播的计算公式吗?
。
其中,,由于中值的不同,最终导致,梯度消失或爆炸。
我们将LSTM抽象成这样:

![]() 分别表示三个门,
分别表示三个门, 表示sigmoid函数。他的值是介于0到1之间的,刚好用趋近于0时表示流入不能通过gate,趋近于1时表示流入可以通过gate。
表示sigmoid函数。他的值是介于0到1之间的,刚好用趋近于0时表示流入不能通过gate,趋近于1时表示流入可以通过gate。
![]()
![]()
![]()
当前的状态 ![]() ,展开后得:
,展开后得:![]()
最后加上激活函数:![]()
那么,在LSTM中:
 ,
,
![]() 的图像如下:
的图像如下:
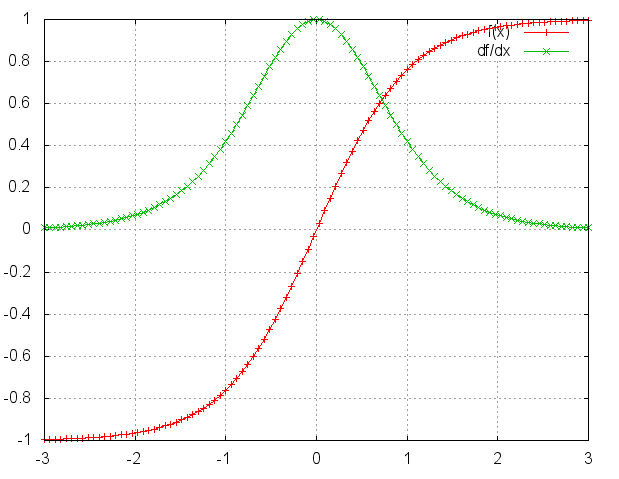
 图像:
图像:
![]() 的值是【0,1】的,所以
的值是【0,1】的,所以
 这样就解决了传统RNN中梯度消失的问题。
这样就解决了传统RNN中梯度消失的问题。
pytorch中的LSTM
详细API 请参考:pytorch 官方文档链接
结合图示(上面RNN的展示图),我们知道,定义一个RNN,需要告诉他输入的向量长度(拿上面文本处理举例,即指定padding 后的 sentence length),隐藏层的节点数量,RNN堆叠的层数,默认是1层。
其他一些参数解释如下:
Parameters
-
input_size – The number of expected features in the input x
-
hidden_size – The number of features in the hidden state h
-
num_layers – Number of recurrent layers. E.g., setting
num_layers=2would mean stacking two LSTMs together to form a stacked LSTM, with the second LSTM taking in outputs of the first LSTM and computing the final results. Default: 1 -
bias – If
False, then the layer does not use bias weights b_ih and b_hh. Default:True -
batch_first – If
True, then the input and output tensors are provided as (batch, seq, feature). Default:False -
dropout – If non-zero, introduces a Dropout layer on the outputs of each LSTM layer except the last layer, with dropout probability equal to
dropout. Default: 0 -
bidirectional – If
True, becomes a bidirectional LSTM. Default:False
一个示例:
#定义一个LSTM你需要定义输入的向量长度,隐藏节点数量,和LSTM堆叠的层数。
rnn = nn.LSTM(10, 20, 2) # 一个单词向量长度为10,隐藏层节点数为20,LSTM有2层
input = torch.randn(5, 3, 10) # 输入数据由3个句子组成(batch),每个句子由5个单词组成,单词向量长度为10
h0 = torch.randn(2, 3, 20) # LSTM层数*方向为2*1, batch为3, 隐藏层节点数为20
c0 = torch.randn(2, 3, 20) # 同上
output, (hn, cn) = rnn(input, (h0, c0))
print(output.shape, hn.shape, cn.shape)
>>> torch.Size([5, 3, 20])
torch.Size([2, 3, 20]) torch.Size([2, 3, 20])
可以发现,定义好LSTM之后, 我们需要初始化 ![]() ,pytorch 中两者默认初始化输入方式为:(nlayers* direction , batch_size , hidden),如之前例子所述,LSTM一次会跑完整个句子,output 在最后一个时刻跑完后产生,他实际上是包含所有时刻hidden的tensor,维度为[sequence_length * batch_size * hidden_size]。hn,cn在每一个时刻都会产生。
,pytorch 中两者默认初始化输入方式为:(nlayers* direction , batch_size , hidden),如之前例子所述,LSTM一次会跑完整个句子,output 在最后一个时刻跑完后产生,他实际上是包含所有时刻hidden的tensor,维度为[sequence_length * batch_size * hidden_size]。hn,cn在每一个时刻都会产生。
参数的估计
LSTM参数个数与![]() 无关。如图,我们可以看到,涉及到的参数都在
无关。如图,我们可以看到,涉及到的参数都在![]() 四步的运算中。输入都是
四步的运算中。输入都是![]() 的拼接,计算后输出的 与 等维度。
的拼接,计算后输出的 与 等维度。
那么假设输入 的维度为 X , 隐藏层维度为 H,那么
的维度为 X , 隐藏层维度为 H,那么 参数矩阵的维度应该为(X+H)* H,
参数矩阵的维度应该为(X+H)* H, ![]() 四步的运算的操作都可简化为
四步的运算的操作都可简化为 ,
, ![]() 的维度显然是 H * 1 ,于是总参数为:4 * ((X+H)* H + H)
的维度显然是 H * 1 ,于是总参数为:4 * ((X+H)* H + H)
GRU
GRU(Gate Recurrent Unit)是循环神经网络(Recurrent Neural Network, RNN)的一种。和LSTM(Long-Short Term Memory)一样,也是为了解决长期记忆和反向传播中的梯度等问题而提出来的。相比LSTM,使用GRU能够达到相当的效果,并且相比之下更容易进行训练,能够很大程度上提高训练效率。
GRU结构如下:

GRU的两个门,分别是reset gate  和 update gate
和 update gate  计算方法和LSTM中门的计算方法类似。 选隐藏层(candidate hidden layer)
计算方法和LSTM中门的计算方法类似。 选隐藏层(candidate hidden layer)![]() 相当于LSTM 中的
相当于LSTM 中的 ![]() , 控制信息的保留,最后 控制需要从前一时刻的隐藏层 中遗忘多少信息,需要加入多少当前 时刻的隐藏层信息
, 控制信息的保留,最后 控制需要从前一时刻的隐藏层 中遗忘多少信息,需要加入多少当前 时刻的隐藏层信息 ![]() 。
。
参考文献:
- Chung J, Gulcehre C, Cho K, et al. Empirical evaluation of gated recurrent neural networks on sequence modeling[J]. arXiv: Neural and Evolutionary Computing, 2014.
- Understanding LSTM Networks
- https://en.wikipedia.org/wiki/Long_short-term_memory
- https://zhuanlan.zhihu.com/p/28687529
- https://pytorch.org/docs/stable/nn.html?highlight=lstm#torch.nn.LSTM