Routh-Hurwitz准则——判别实系数多项式有无实部非负的根的充要条件
Routh-Hurwitz准则——判别实系数多项式有无实部非负的根的充要条件
- 一、引言
- 二、准则内容
- 三、举例说明
- 四、证明思路
- 五、证明
-
- 引理1
- 引理2
-
- ①沿着C
- ②沿着C1(C2同理,因为是对称的)
- 六、证明思路梗概
- 七、参考文献/书籍
本文为 该知乎文章搬运到CSDN的文章, 该文章作者与本文章为同一人,内容是本人原创。之所以搬运到CSDN,是因为CSDN的markdown编辑器比较好用,最关键的是文章超链接功能,因为我写的文章都比较长,没有超链接找起来很辛苦。从今往后我将经常在CSDN发文, 有时候会把部分我在知乎写的文章搬运过来。因为知乎的编辑器与CSDN的编辑器不同,所以搬运也比较麻烦,所以不定期更新。 本文在原文上有一些增补修改(增加了第三章的4、5),修改了部分错误,增加了Routh-Hurwitz准则在特殊情况下的处理方式。本文 从证明思路、细节的角度讲解Routh-Hurwitz准则,对具体应用也有一定阐述。
Routh-Hurwitz准则(R-H准则)是一个「判别系统稳定性」的重要准则,它给出了一个「判别实系数多项式有无实部非负的根」的充要条件。遗憾的是,笔者在学习这一准则时,并未在网上发现其他作者对该准则进行梳理,更没有找到该准则的证明过程(书上也未给出证明)。因此,笔者在梳理相关参考文献基础上,结合笔者自己的理解,简化了部分参考文献的思路,对该准则进行了证明和梳理。
一、引言
在系统分析中,我们往往关注系统的频率特性,即系统响应函数 h(t) 的拉普拉斯变换函数 H(s) 。常见的 H(s) 往往是「多项式除以多项式」型的,即分子分母都是实系数多项式。我们期望我们的系统是一个稳定的系统,即有界输入对应有界输出(BIBO)。而我们知道:「系统的稳定性问题」等价于「系统函数 H(s) 的极点 p_k 是否在左半平面1」。而R-H准则给了我们判别之的一个充要条件 。至于这个充要条件具体是什么,请读者继续看后文内容。
举一个简单的例子: H ( s ) = s 2 + 3 s + 3 s 3 + 3 s 2 + 4 s + 2 = 1 s + 1 + 1 s 2 + 2 s + 2 \displaystyle H(s)=\frac{s^2+3s+3}{s^3+3s^2+4s+2}=\frac1{s+1}+\frac1{s^2+2s+2} H(s)=s3+3s2+4s+2s2+3s+3=s+11+s2+2s+21,这个信号对应的时域响应(拉普拉斯反变换)为 f ( t ) = e − t + e − t sin t f(t)=\mathrm e^{-t}+\mathrm e^{-t}\sin t f(t)=e−t+e−tsint ,因为有一个「指数衰减因子」 e − t \mathrm e^{-t} e−t,这个信号自然衰减得很快。因此,这个系统是一个稳定系统。
而我们注意到, H(s) 的极点的实部均为-1,这也是 f(t) 的「指数衰减因子」 e − 1 ⋅ t \mathrm e^{-1\cdot t} e−1⋅t 为-1的原因。推而广之,极点的实部充分必要地决定了其拉普拉斯反变换函数的「指数衰减因子」的系数,这也自然充分必要地决定了系统地稳定性。
而极点的实部判别又可以充分必要地通过「R-H准则」进行,这也是「R-H准则」的实际应用所在。
二、准则内容
对于一个多项式 p ( s ) = a n s n + a n − 1 s n − 1 + ⋯ + a 1 s + a 0 p(s)=a_ns^n+a_{n-1}s^{n-1}+\cdots+a_1s+a_0 p(s)=ansn+an−1sn−1+⋯+a1s+a0
不妨设 a n > 0 a_n>0 an>0 ,接下来,让我们构造一个被称为「Rouch表」的东西,我们可以断言——「多项式 p ( s ) p(s) p(s) 所有零点都位于左半平面」等价于「Rouch表首列元素都为正」(如果不是,那么符号改变的次数即为右半平面根的个数)。
为了便于实际应用,在这里我将「Rouch表」进行了一个变形 。在后续证明过程中,我们使用的是另一种形式的「Rouch表」,我们只需要知道它们两个是一个东西就行了。
①如果n为偶数,则我们称下表为 p ( s ) p(s) p(s) 的Rouch表
a n a n − 2 a n − 4 ⋯ a 4 a 2 a 0 a n − 1 a n − 3 a n − 5 ⋯ a 3 a 1 a − 1 c n − 1 c n − 3 c n − 5 ⋯ c 3 c 1 d n − 1 d n − 3 d n − 5 ⋯ d 3 d 1 ⋮ u n − 1 u n − 3 u n − 1 u n − 3 v n − 1 } n + 1 行 (2.1) \left. \begin{array}{lllclll} a_n&a_{n-2}&a_{n-4}&\cdots&a_4&a_2&a_0\\ a_{n-1}&a_{n-3}&a_{n-5}&\cdots&a_3&a_1&a_{-1}\\ c_{n-1}&c_{n-3}&c_{n-5}&\cdots&c_3&c_1\\ d_{n-1}&d_{n-3}&d_{n-5}&\cdots&d_3&d_1\\ \vdots&&&&&\\ u_{n-1}&u_{n-3}&&&&\\ u_{n-1}&u_{n-3}&&&&\\ v_{n-1}&&&&&\\ \end{array} \right\}n+1行\tag{2.1} anan−1cn−1dn−1⋮un−1un−1vn−1an−2an−3cn−3dn−3un−3un−3an−4an−5cn−5dn−5⋯⋯⋯⋯a4a3c3d3a2a1c1d1a0a−1⎭⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎫n+1行(2.1)
其中 a n , a n − 1 , ⋯ , a 1 , a 0 a_n,a_{n-1},\cdots,a_1,a_0 an,an−1,⋯,a1,a0 与多项式 p ( s ) p(s) p(s) 系数相同, a − 1 a_{-1} a−1 为人为补的0。
并且系数有(其余以此类推):
c n − 1 = − ∣ a n a n − 2 a n − 1 a n − 3 ∣ a n − 1 \displaystyle c_{n-1}=\frac{- \left| \begin{array}{ll} a_{n}&a_{n-2}\\ a_{n-1}&a_{n-3} \end{array} \right| }{a_{n-1}} cn−1=an−1−∣∣∣∣anan−1an−2an−3∣∣∣∣ , c n − 3 = − ∣ a n a n − 4 a n − 1 a n − 5 ∣ a n − 1 \displaystyle c_{n-3}=\frac{- \left| \begin{array}{ll} a_{n}&a_{n-4}\\ a_{n-1}&a_{n-5} \end{array} \right| }{a_{n-1}} cn−3=an−1−∣∣∣∣anan−1an−4an−5∣∣∣∣
d n − 1 = − ∣ a n − 1 a n − 3 c n − 1 c n − 3 ∣ c n − 1 \displaystyle d_{n-1}=\frac{- \left| \begin{array}{ll} a_{n-1}&a_{n-3}\\ c_{n-1}&c_{n-3} \end{array} \right| }{c_{n-1}} dn−1=cn−1−∣∣∣∣an−1cn−1an−3cn−3∣∣∣∣ , d n − 3 = − ∣ a n − 1 a n − 5 c n − 1 c n − 5 ∣ c n − 1 \displaystyle d_{n-3}=\frac{- \left| \begin{array}{ll} a_{n-1}&a_{n-5}\\ c_{n-1}&c_{n-5} \end{array} \right| }{c_{n-1}} dn−3=cn−1−∣∣∣∣an−1cn−1an−5cn−5∣∣∣∣
②如果n为奇数,则我们称下表为 p ( s ) p(s) p(s) 的Rouch表
a n a n − 2 a n − 4 ⋯ a 5 a 3 a 1 a − 1 a n − 1 a n − 3 a n − 5 ⋯ a 4 a 2 a 0 a − 2 c n − 1 c n − 3 c n − 5 ⋯ c 4 c 2 c 0 d n − 1 d n − 3 d n − 5 ⋯ d 4 d 2 d 0 ⋮ u n − 1 u n − 3 u n − 1 u n − 3 } n + 1 行 (2.2) \left. \begin{array}{lllcllll} a_n&a_{n-2}&a_{n-4}&\cdots&a_5&a_3&a_1&a_{-1}\\ a_{n-1}&a_{n-3}&a_{n-5}&\cdots&a_4&a_2&a_{0}&a_{-2}\\ c_{n-1}&c_{n-3}&c_{n-5}&\cdots&c_4&c_2&c_0\\ d_{n-1}&d_{n-3}&d_{n-5}&\cdots&d_4&d_2&d_0\\ \vdots&&&&&&\\ u_{n-1}&u_{n-3}&&&&&\\ u_{n-1}&u_{n-3}&&&&&\\ \end{array} \right\}n+1行\tag{2.2} anan−1cn−1dn−1⋮un−1un−1an−2an−3cn−3dn−3un−3un−3an−4an−5cn−5dn−5⋯⋯⋯⋯a5a4c4d4a3a2c2d2a1a0c0d0a−1a−2⎭⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎫n+1行(2.2)
除了 a − 1 a_{-1} a−1, a − 2 = 0 a_{-2}=0 a−2=0 进行补0以外,其余系数关系与n为偶数情形是相一致的。
三、举例说明
前面的内容较为抽象,下面举几个具体例子,让大家直观感受一下「R-H准则」的使用方式。
1、设某系统的系统函数为 H ( s ) = A s 2 + B s + C s 3 + s 2 + 2 s + 8 \displaystyle H(s)=\frac{As^2+Bs+C}{s^3+s^2+2s+8} H(s)=s3+s2+2s+8As2+Bs+C (A、B、C均为实常数),用「R-H准则」判断该系统是否稳定。
解:
显然:「系统稳定」等价于「 H(s) 极点全在左半平面」等价于「分母多项式零点全位于左半平面」,故对分母多项式采用「R-H准则」判别。
列出「Rouch表」如下:
1 2 0 1 8 0 − 6 0 8 0 \begin{array}{rrr} 1&2&0\\ 1&8&0\\-6&0&\\8&0 \end{array} 11−68280000
显然,「Rouch表」第一列元素为 1 → 1 → − 6 → 8 1\to1\to-6\to8 1→1→−6→8 ,有两次改变符号,则分母多项式有两个右半平面零点,显然系统不稳定。
2、判别多项式 f ( x ) = x 4 + 2 x 3 + 3 x 2 + 4 x + 5 f(x)=x^4+2x^3+3x^2+4x+5 f(x)=x4+2x3+3x2+4x+5 的零点分布情况
解:
列出「Rouch表」如下:
1 3 5 0 2 4 0 0 1 5 0 − 6 0 0 5 0 \begin{array}{rrr} 1&3&5&0\\ 2&4&0&0\\ 1&5&0\\ -6&0&0\\ 5&0 \end{array} 121−6534500500000
显然,「Rouch表」第一列元素为 1 → 2 → 1 → − 6 → 5 1\to2\to1\to-6\to5 1→2→1→−6→5 ,有两次改变符号,则多项式有两个右半平面零点。
3、判别多项式 f ( x ) = x 3 + 2 x 2 + 2 x + 1 f(x)=x^3+2x^2+2x+1 f(x)=x3+2x2+2x+1 的零点分布情况
解:
列出「Rouch表」如下:
1 2 0 2 1 0 3 2 0 1 0 \begin{array}{ccc} 1&2&0\\ 2&1&0\\ \frac32&0\\ 1&0\\ \end{array} 12231210000
显然,「Rouch表」第一列元素为 1 → 2 → 3 2 → 1 1\to2\to\frac32\to1 1→2→23→1 ,未改变符号,则多项式零点全在左半平面。
特殊情况1:某行出现分母为0
解决方案:把f(x)乘以(x+1)
4、判别多项式 f ( x ) = x 3 + 2 x + 1 f(x)=x^3+2x+1 f(x)=x3+2x+1 的零点分布情况
先列出Routh表前2行:
1 2 0 0 1 0 \begin{array}{ccc} 1&2&0\\ 0&1&0\end{array} 102100
注意到:3行1列出现分母为0,Routh准则失效
为了解决这一问题,采用一个技巧:把f(x)乘以(x+1)
即:构造出 g ( x ) = ( x + 1 ) ( x 3 + 2 x + 1 ) = x 4 + x 3 + 2 x 2 + 3 x + 1 g(x)=(x+1)(x^3+2x+1)=x^4+x^3+2x^2+3x+1 g(x)=(x+1)(x3+2x+1)=x4+x3+2x2+3x+1
解:
列出「Rouch表」如下:
1 2 1 0 1 3 0 0 − 1 − 1 0 2 0 0 1 0 \begin{array}{rrr} 1&2&1&0\\ 1&3&0&0\\ -1&-1&0\\ 2&0&0\\ 1&0 \end{array} 11−12123−100100000
显然,「Rouch表」第一列元素为 1 → 1 → − 1 → 2 → 1 1\to1\to-1\to2\to1 1→1→−1→2→1 ,有两次改变符号,则多项式有两个右半平面零点。
特殊情况2:出现全零行
解决方案:构造偶次多项式
5、判别多项式 f ( x ) = x 6 + x 5 − 2 x 4 − 3 x 3 − 7 x 2 − 4 x − 4 f(x)=x^6+x^5-2x^4-3x^3-7x^2-4x-4 f(x)=x6+x5−2x4−3x3−7x2−4x−4 的零点分布情况
解:
列出「Rouch表」如下:
s 6 1 − 2 − 7 − 4 0 s 5 1 − 3 − 4 0 0 s 4 1 − 3 − 4 0 s 3 0 0 0 0 \begin{array}{ccrrrc} s^6&1&-2&-7&-4&0\\ s^5&1&-3&-4&0&0\\ s^4&1&-3&-4&0\\ s^3&0&0&0&0\\ \end{array} s6s5s4s31110−2−3−30−7−4−40−400000
注意到: s 3 s^3 s3行出现全零行
解决方案:用 s 4 s^4 s4的系数构造偶次多项式(原因是Routh判据的证明方式就是借助的偶次多项式)
利用 s 4 s^4 s4的系数构造 F ( s ) = s 4 − 3 s 2 − 4 F(s)=s^4-3s^2-4 F(s)=s4−3s2−4
求导得到 F ′ ( s ) = 4 s 3 − 6 s F'(s)=4s^3-6s F′(s)=4s3−6s
续写Routh表:
s 6 1 − 2 − 7 − 4 0 s 5 1 − 3 − 4 0 0 s 4 1 − 3 − 4 0 s 3 4 − 6 0 s 2 − 1.5 − 4 0 s 1 − 100 3 0 s 0 − 4 0 \begin{array}{ccrrrc} s^6&1&-2&-7&-4&0\\ s^5&1&-3&-4&0&0\\ s^4&1&-3&-4&0\\ s^3&4&-6&0\\ s^2&-1.5&-4&0\\s^1&-\frac{100}3&0\\s^0&-4&0 \end{array} s6s5s4s3s2s1s01114−1.5−3100−4−2−3−3−6−400−7−4−400−40000
事实上,只要出现全零行,我们构造偶次多项式的时候,我们就不必继续算下去了,因为必然会有不稳定根。这是因为在偶次多项式中令 t = s 2 t=s^2 t=s2,无论解出来t为何值,s的两根总是关于原点对称的。只要有一个左半平面根,另一根就必然是有右半平面的。事实上,本方程有1个右半平面根 x = 2 x=2 x=2与2个虚轴根 x = ± j x=\pm j x=±j。这也与Routh表变号一次这一事实相对应。不过在这里虚轴根没有被算在不稳定根里面,所以遇到全零行这种情况,大可直接说系统不稳定就好了
四、证明思路
这一准则的证明是相对复杂的,如果不在此之前理清证明的思路,我们恐怕是难以看懂证明的。事实上,由于参考文献的许多处(不下于10处)书写错误,以及笔者自身能力的菜,导致这个证明啃了很长时间。在理清参考文献的大致思路后,笔者决定换一个更清晰的角度来证明这一准则。这一证明力图向读者展现证明的思路,为了保证其思路的清晰性,会损害一些严谨性。但是,这种直观分析方法有助于让读者理解这一证明中的核心思想。
思路:
在提到多项式在全复平面的零点,我们第一想到的必然是「代数基本定理」。而第二想到的,则应当是《复变函数》里面的「辐角原理」。不过遗憾的是,这个内容很多学校没有讲,甚至我们教材上也没有这个内容,我也是在高等教育出版社的《复变函数》中才学到这一内容 的。因此,在证明之前,我觉得应当有必要说一说「辐角原理」。
「辐角原理」:若f(z)在封闭区域 C 的边界与内部解析,且在边界上无零点,则有:
C内部的零点数= 1 2 π × \frac1{2\pi}\times 2π1×(沿C巡行一周辐角改变量)
辐角原理用「辐角」改变量刻画了「 f(z) 在区域内的零点数」。在这一问题中,我们的思路核心就是就是利用辐角原理转化问题。
总体思路:
如下图所示:取 R → ∞ R\to\infty R→∞ 的半圆围道C,并且用绕开全部虚轴零点的直线C1、C2连接之,其中P1、P2为虚轴零点,P3、P4、P5为左半平面零点。不妨记 C 0 = C + C 1 + C 2 C_0=C+C_1+C_2 C0=C+C1+C2 。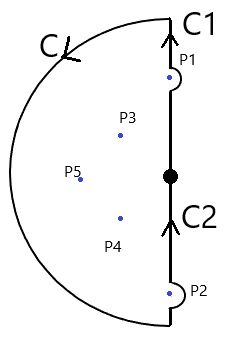
我们试图使用“筛”的方法,记原多项式为 p n ( x ) p_n(x) pn(x) ,构造一族辅助多项式 { p n ( s ) } \{p_n(s)\} { pn(s)} ,分别为n次、n-1次、…、1次、0次,由于「代数基本定理」,我们容易知道这一族辅助多项式 { p n ( s ) } \{p_n(s)\} { pn(s)} 中每个多项式的总零点数分别为n个、n-1个、…、1个、0个。那么,我们期望能找到一个充要的手段,使得:这族辅助多项式每次减少的一个零点都在左半平面。这样的话,我们就可以“筛”出n个左半平面的零点。反之,如果不能筛出n个左半平面的零点,由于这个办法是充要的,就可以说明左半平面确实没有n个零点。
那么,如何“筛”呢?根据「辐角原理」,我们知道:区域 C 0 C_0 C0 内每减少一个零点,辐角改变量减少2π。从这里入手,如果能找到一种“筛”的法则,使得每次都能减少且仅减少2π个辐角改变量,那么这个法则就能充要的判别该多项式是否只有左半平面零点。
当然,值得补充的是,巡行路径 C 0 C_0 C0 对于多项式族 { p n ( s ) } \{p_n(s)\} { pn(s)} 是不能变的。C倒没什么问题,因为 R → ∞ R\to\infty R→∞ 这一点足以让其绕过所有零点。但虚轴上的零点P1、P2则是无法绕过的。所以,我们还期望这种“筛”的法则能够让辅助多项式族 { p n ( s ) } \{p_n(s)\} { pn(s)} 在虚轴上的零点总是不变的。
好了,以上就是证明的思路梗概,接下来就是利用这个思路进行具体的证明了。
如果不想看繁琐的证明的读者,只想知道思路梗概的话,请跳转到第六章
五、证明
再把之前的图贴过来,因为后面证明会大量用到这张图。
为了证明看着方便,将Rouch表进行一些改造:
行 数 Rouch 表 辅 助 多 项 式 1 a n a n − 2 a n − 4 ⋯ a 4 a 2 a 0 h n ( s 2 ) 2 a n − 1 a n − 3 a n − 5 ⋯ a 3 a 1 g n − 2 ( s 2 ) 3 b n − 2 b n − 4 b n − 6 ⋯ b 2 b 0 h n − 2 ( s 2 ) 4 b n − 3 b n − 5 b n − 7 ⋯ b 1 g n − 4 ( s 2 ) ⋮ ⋮ ⋮ n − 1 u 2 u 0 h 2 ( s 2 ) n u 1 g 0 ( s 2 ) n + 1 v 0 h 0 ( s 2 ) \begin{array}{c|lllclll|c} 行数&&&&\text{Rouch}表&&&&辅助多项式\\ \hline 1&a_n&a_{n-2}&a_{n-4}&\cdots&a_4&a_2&a_0&h_n(s^2)\\ 2&a_{n-1}&a_{n-3}&a_{n-5}&\cdots&a_3&a_1&&g_{n-2}(s^2)\\ 3&b_{n-2}&b_{n-4}&b_{n-6}&\cdots&b_2&b_0&&h_{n-2}(s^2)\\ 4&b_{n-3}&b_{n-5}&b_{n-7}&\cdots&b_1&&&g_{n-4}(s^2)\\ \vdots&\vdots&&&&&&&\vdots\\ n-1&u_2&u_0&&&&&&h_{2}(s^2)\\ n&u_1&&&&&&&g_{0}(s^2)\\ n+1&v_0&&&&&&&h_{0}(s^2)\\ \end{array} 行数1234⋮n−1nn+1anan−1bn−2bn−3⋮u2u1v0an−2an−3bn−4bn−5u0an−4an−5bn−6bn−7Rouch表⋯⋯⋯⋯a4a3b2b1a2a1b0a0辅助多项式hn(s2)gn−2(s2)hn−2(s2)gn−4(s2)⋮h2(s2)g0(s2)h0(s2)
并构造这一族辅助多项式:
p n ( s ) = s h n ( s 2 ) + s g n − 2 ( s 2 ) p n − 1 ( s ) = s g n − 2 ( s 2 ) + s h n − 2 ( s 2 ) p n − 2 ( s ) = s h n − 2 ( s 2 ) + s g n − 4 ( s 2 ) ⋮ p 2 ( s ) = s h 2 ( s 2 ) + s g 0 ( s 2 ) p 1 ( s ) = s g 0 ( s 2 ) + s h 0 ( s 2 ) } (5.0.1) \left. \begin{aligned} p_n(s)&=\phantom{s\,} h_n(s^2)&+&s\,g_{n-2}(s^2)\\ p_{n-1}(s)&=s\,g_{n-2}(s^2)&+&\phantom{s\,} h_{n-2}(s^2)\\ p_{n-2}(s)&=\phantom{s\,} h_{n-2}(s^2)&+&s\,g_{n-4}(s^2)\\ \vdots\\ p_2(s)&=\phantom{s\,} h_2(s^2)&+&s\,g_{0}(s^2)\\ p_{1}(s)&=s\,g_{0}(s^2)&+&\phantom{s\,} h_{0}(s^2)\\ \end{aligned} \right\}\tag{5.0.1} pn(s)pn−1(s)pn−2(s)⋮p2(s)p1(s)=shn(s2)=sgn−2(s2)=shn−2(s2)=sh2(s2)=sg0(s2)+++++sgn−2(s2)shn−2(s2)sgn−4(s2)sg0(s2)sh0(s2)⎭⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎫(5.0.1)
直观地看, g(s) 是原多项式的全体奇数次项除以s, h(s) 是原多项式的全体偶数项。
举个例子或许会更直观:
如果 p 4 ( s ) = s 4 + 2 s 3 + 3 s 2 + 4 s + 5 p_4(s)=s^4+2s^3+3s^2+4s+5 p4(s)=s4+2s3+3s2+4s+5 ,
那么 h 4 ( s 2 ) = s 4 + 3 s 2 + 5 , s g 2 ( s 2 ) = 2 s 3 + 4 s h_4(s^2)=s^4+3s^2+5 , s\,g_2(s^2)=2s^3+4s h4(s2)=s4+3s2+5,sg2(s2)=2s3+4s
也就是说 g 2 ( s 2 ) = 2 s 2 + 4 g_2(s^2)=2s^2+4 g2(s2)=2s2+4
为了读者理解,此处的证明倾向于启发式,用直观的方法让读者感受准则为何成立
以下证明以n为偶数为例,n为奇数仿此证明不难。
先证明2个引理,之后的内容就水到渠成了。
引理1
引理1、辅助多项式族 { p n ( s ) } \{p_n(s)\} { pn(s)} 在虚轴上的零点(包括重数)不变
原文献证明思路是用零点定义利用代数方法化简证明来做,笔者认为这不直观,笔者采取了一种直观的方法来分析这个问题。
分析:
假设虚轴上一点 s = j ω s=j\omega s=jω 是 p n ( s ) = a n s n + a n − 1 s n + ⋯ + a 1 s + a 0 p_n(s)=a_ns^n+a_{n-1}s^n+\cdots+a_1s+a_0 pn(s)=ansn+an−1sn+⋯+a1s+a0 的零点,那么自然有:
p n ( j ω ) = a n ( j ω ) n + a n − 1 ( j ω ) n − 1 + ⋯ + a 1 ( j ω ) + a 0 = 0 (5.1.1) p_n(j\omega)=a_n(j\omega)^n+a_{n-1}(j\omega)^{n-1}+\cdots+a_1(j\omega)+a_0=0\tag{5.1.1} pn(jω)=an(jω)n+an−1(jω)n−1+⋯+a1(jω)+a0=0(5.1.1)
考虑到(5.0.1),易见:
{ p n ( s ) = h n ( s 2 ) + s g n − 2 ( s 2 ) p n − 1 ( s ) = h n − 2 ( s 2 ) + s g n − 2 ( s 2 ) (5.1.2) \begin{cases} p_n(s)&=h_n(s^2)&+sg_{n-2}(s^2)\\ p_{n-1}(s)&=h_{n-2}(s^2)&+sg_{n-2}(s^2) \end{cases} \tag{5.1.2} { pn(s)pn−1(s)=hn(s2)=hn−2(s2)+sgn−2(s2)+sgn−2(s2)(5.1.2)
因为,我们这里只考虑虚轴上的零点,代入 s = j ω s=j\omega s=jω :
{ p n ( j ω ) = h n ( − ω 2 ) + j ω g n − 2 ( − ω 2 ) p n − 1 ( j ω ) = h n − 2 ( − ω 2 ) + j ω g n − 2 ( − ω 2 ) (5.1.3) \begin{cases} p_n(j\omega)&=h_n(-\omega^2)&+j\omega g_{n-2}(-\omega^2)\\ p_{n-1}(j\omega)&=h_{n-2}(-\omega^2)&+j\omega g_{n-2}(-\omega^2) \end{cases} \tag{5.1.3} { pn(jω)pn−1(jω)=hn(−ω2)=hn−2(−ω2)+jωgn−2(−ω2)+jωgn−2(−ω2)(5.1.3)
由于h、g都是实系数多项式,那么 h ( − ω 2 ) h(-\omega^2) h(−ω2) 自然是纯实数, j ω g ( − ω 2 ) j\omega g(-\omega^2) jωg(−ω2) 也自然是纯虚数。
也就是说:公式(5.1.3)相当于对 p n ( x ) p_n(x) pn(x) 沿着实部和虚部进行拆分
回想一下,我们期望的是:多项式族 { p n ( s ) } \{p_n(s)\} { pn(s)} 的虚轴共零点,依次左半平面零点数-1。
换言之,我们期望构造出一个 u ( s 2 ) u(s^2) u(s2) ,使得 p n ( s ) = p n − 1 ( s ) + u ( s 2 ) p_n(s)=p_{n-1}(s)+u(s^2) pn(s)=pn−1(s)+u(s2) ,其中当s为 p n ( s ) p_n(s) pn(s) 的零点或者 p n − 1 ( s ) p_{n-1}(s) pn−1(s) 的零点时, u ( s 2 ) u(s^2) u(s2) 总是为0。
这也就是我们如此构造系数 b n − 2 = − ∣ a n a n − 2 a n − 1 a n − 3 ∣ a n − 1 b_{n-2}=\frac{- \left| \begin{array}{ll} a_{n}&a_{n-2}\\ a_{n-1}&a_{n-3} \end{array} \right| }{a_{n-1}} bn−2=an−1−∣∣∣anan−1an−2an−3∣∣∣ 的理由。
好了,让我们重回证明:
考虑到系数(其余同理不予列举,详见第二章) :
b n − 2 = − ∣ a n a n − 2 a n − 1 a n − 3 ∣ a n − 1 = a n − 2 − a n a n − 3 a n − 1 b_{n-2}=\frac{- \left| \begin{array}{ll} a_{n}&a_{n-2}\\ a_{n-1}&a_{n-3} \end{array} \right| }{a_{n-1}}=a_{n-2}-\frac{a_na_{n-3}}{a_{n-1}} bn−2=an−1−∣∣∣anan−1an−2an−3∣∣∣=an−2−an−1anan−3
可以推出:
h n − 2 ( s 2 ) = b n − 2 s n − 2 + b n − 4 s n − 4 + ⋯ + b 0 = h n ( s 2 ) − a n a n − 1 s 2 g n − 2 ( s 2 ) (5.1.4) h_{n-2}(s^2)=b_{n-2}s^{n-2}+b_{n-4}s^{n-4}+\cdots+b_0=h_n(s^2)-\frac{a_n}{a_{n-1}}s^2g_{n-2}(s^2)\tag{5.1.4} hn−2(s2)=bn−2sn−2+bn−4sn−4+⋯+b0=hn(s2)−an−1ans2gn−2(s2)(5.1.4)
将(5.1.3)两式相减:
p n ( s ) = p n − 1 ( s ) + a n a n − 1 s 2 g n − 2 ( s 2 ) (5.1.5) p_n(s)=p_{n-1}(s)+\frac{a_n}{a_{n-1}}s^2g_{n-2}(s^2)\tag{5.1.5} pn(s)=pn−1(s)+an−1ans2gn−2(s2)(5.1.5)
我们注意到: a n a n − 1 s 2 g n − 2 ( s 2 ) \frac{a_n}{a_{n-1}}s^2g_{n-2}(s^2) an−1ans2gn−2(s2) 就是我们要的 u ( s 2 ) u(s^2) u(s2) 。
根据公式(5.1.2),我们知道 s g n − 2 ( s 2 ) sg_{n-2}(s^2) sgn−2(s2) 同时是 p n ( s ) p_n(s) pn(s) 和 p n − 1 ( s ) p_{n-1}(s) pn−1(s) 的虚部。无论是 p n ( s ) p_n(s) pn(s) 为0,还是 p n − 1 ( s ) p_{n-1}(s) pn−1(s) 为0,作为其虚部的 s g n − 2 ( s 2 ) sg_{n-2}(s^2) sgn−2(s2) 必然为0,这也就证明了: p n ( s ) p_n(s) pn(s) 与 p n − 1 ( s ) p_{n-1}(s) pn−1(s) 在虚轴上共零点。故引理1得证。
事实上,我们还可以证明:不仅零点不变,而且零点重数也不变。此处留给读者作为习题(逃)。
引理2
引理2、如图,沿 C 0 = C + C 1 + C 2 C_0=C+C_1+C_2 C0=C+C1+C2 逆时针巡行一周, 则: Δ A r g p n ( s ) − Δ A r g p n − 1 ( s ) = 2 π \Delta\mathrm{Arg}\, p_n(s)-\Delta\mathrm{Arg}\, p_{n-1}(s)=2\pi ΔArgpn(s)−ΔArgpn−1(s)=2π 的充要条件是 a n a n − 1 > 0 a_na_{n-1}>0 anan−1>0
分析:
将路径分解为C、C1、C2
①沿着C
设多项式为: p n ( s ) = ∏ i = 1 n ( s − p i ) p_n(s)=\prod_{i=1}^n(s-p_i) pn(s)=∏i=1n(s−pi)
则: Δ C A r g p n ( s ) = ∑ i = 1 n Δ C A r g ( s − p i ) \Delta_C\mathrm{Arg}\,p_n(s)=\sum_{i=1}^n\Delta_C\mathrm{Arg}\,(s-p_i) ΔCArgpn(s)=∑i=1nΔCArg(s−pi)
不失一般性地取一个 Δ A r g ( s − p i ) \Delta\mathrm{Arg}\,(s-p_i) ΔArg(s−pi) ,由于沿着C变动,如下图,我们试图说明:下图标示的角度总是180°。
看起来这一结论不可思议,因为从图上看起来它比180°大那么一点点。但事实上,如果我们稍加思索,便会发现其实显然成立的。因为 R → ∞ R\to\infty R→∞ ,无论你零点在哪里,在无穷大的半径面前,都一视同仁,蹦跶不起来。如果将这个圆想象得无穷大,那么我们可以显然得到 Δ C A r g ( s − p i ) = π ( ∀ i ) \Delta_C\mathrm{Arg}\,(s-p_i)=\pi\quad(\forall i) ΔCArg(s−pi)=π(∀i) 。
即 Δ C A r g p n ( s ) = n π \Delta_C\mathrm{Arg}\,p_n(s)=n\pi ΔCArgpn(s)=nπ , Δ C A r g p n − 1 ( s ) = ( n − 1 ) π \Delta_C\mathrm{Arg}\,p_{n-1}(s)=(n-1)\pi ΔCArgpn−1(s)=(n−1)π
那么自然有(5.2.1)式成立:
Δ C A r g p n ( s ) − Δ C A r g p n − 1 ( s ) = π (5.2.1) \Delta_C\mathrm{Arg}\, p_n(s)-\Delta_C\mathrm{Arg}\, p_{n-1}(s)=\pi\tag{5.2.1} ΔCArgpn(s)−ΔCArgpn−1(s)=π(5.2.1)

②沿着C1(C2同理,因为是对称的)
还是把图复制下来:
以及把公式(5.1.2)和(5.1.5)搬运下来:
{ p n ( s ) = h n ( s 2 ) + s g n − 2 ( s 2 ) p n − 1 ( s ) = h n − 2 ( s 2 ) + s g n − 2 ( s 2 ) (5.1.2) \begin{cases} p_n(s)&=h_n(s^2)&+sg_{n-2}(s^2)\\ p_{n-1}(s)&=h_{n-2}(s^2)&+sg_{n-2}(s^2) \end{cases} \tag{5.1.2} { pn(s)pn−1(s)=hn(s2)=hn−2(s2)+sgn−2(s2)+sgn−2(s2)(5.1.2)
p n ( s ) = p n − 1 ( s ) + a n a n − 1 s 2 g n − 2 ( s 2 ) (5.1.5) p_n(s)=p_{n-1}(s)+\frac{a_n}{a_{n-1}}s^2g_{n-2}(s^2)\tag{5.1.5} pn(s)=pn−1(s)+an−1ans2gn−2(s2)(5.1.5)
前面提到:在虚轴上,h(s)是实部,sg(s²)是虚部。显然, p n ( s ) p_n(s) pn(s) 与 p n − 1 ( s ) p_{n-1}(s) pn−1(s) 的虚部相同。
将 g n − 2 ( − ω 2 ) g_{n-2}(-\omega^2) gn−2(−ω2) 的全体零点如此排列: 0 < ω 1 < ω 2 < ⋯ < ω r < + ∞ 0<\omega_1<\omega_2<\cdots<\omega_r<+\infty 0<ω1<ω2<⋯<ωr<+∞ 。
在每个区间 ( 0 , ω 1 ) , ( ω 1 , ω 2 ) , ⋯ , ( ω r − 1 , ω r ) (0,\omega_1),(\omega_1,\omega_2),\cdots,(\omega_{r-1},\omega_r) (0,ω1),(ω1,ω2),⋯,(ωr−1,ωr) 上,由于 g n − 2 ( − ω 2 ) 为 p n ( j ω ) , p n − 1 ( j ω ) g_{n-2}(-\omega^2) 为 p_n(j\omega),p_{n-1}(j\omega) gn−2(−ω2)为pn(jω),pn−1(jω) 的虚部,所以虚部符号不会改变。
并且由于 ω i \omega_i ωi 是 g ( − ω i 2 ) g(-\omega_i^2) g(−ωi2) 的零点,则 p n ( j ω i ) = p n − 1 ( j ω i ) ( i = 1 , 2 , ⋯ , r ) p_n(j\omega_i)=p_{n-1}(j\omega_i)\quad (i=1,2,\cdots,r) pn(jωi)=pn−1(jωi)(i=1,2,⋯,r) 。
用通俗的话来总结上面这些分析,就是:以 g n − 2 ( s 2 ) g_{n-2}(s^2) gn−2(s2) 的两个相邻虚轴零点作为起点和终点为路径, Δ C ′ A r g p n ( s ) − Δ C ′ A r g p n − 1 ( s ) = 0 \Delta_{C'}\mathrm{Arg}\, p_n(s)-\Delta_{C'}\mathrm{Arg}\, p_{n-1}(s)=0 ΔC′Argpn(s)−ΔC′Argpn−1(s)=0 2
推而广之,沿着0到 g n − 2 ( s ) g_{n-2}(s) gn−2(s) 的最大的一个零点 j ω r j\omega_r jωr 走,也有 Δ C ′ A r g p n ( s ) − Δ C ′ A r g p n − 1 ( s ) = 0 \Delta_{C'}\mathrm{Arg}\, p_n(s)-\Delta_{C'}\mathrm{Arg}\, p_{n-1}(s)=0 ΔC′Argpn(s)−ΔC′Argpn−1(s)=0 ,而且在 s = j ω r s=j\omega_r s=jωr 处有 p n ( j ω r ) = p n − 1 ( j ω r ) p_n(j\omega_r)=p_{n-1}(j\omega_r) pn(jωr)=pn−1(jωr)
再换句话说,就是:
Δ C 1 A r g p n ( s ) − Δ C 1 A r g p n − 1 ( s ) = A r g p n ( j ∞ ) − A r g p n − 1 ( j ∞ ) (5.2.2) \Delta_{C_1}\mathrm{Arg}\, p_n(s)-\Delta_{C_1}\mathrm{Arg}\, p_{n-1}(s)=\mathrm{Arg}\, p_n(j\infty)-\mathrm{Arg}\, p_{n-1}(j\infty)\tag{5.2.2} ΔC1Argpn(s)−ΔC1Argpn−1(s)=Argpn(j∞)−Argpn−1(j∞)(5.2.2)
这么一看,就豁然开朗了!原来 p n p_n pn 和 p n − 1 p_{n-1} pn−1 在 C 1 C_1 C1 上的辐角变化只取决于 j ∞ j\infty j∞ 处的辐角差啊!
一涉及到无穷,我们一般就会很开心,因为这意味着低阶项我们都可以扔掉不管,只考虑最高阶的项,让我们来试试:
Δ C 1 A r g p n ( s ) − Δ C 1 A r g p n − 1 ( s ) = A r g p n ( j ∞ ) p n − 1 ( j ∞ ) = A r g a n j ω a n − 1 \Delta_{C_1}\mathrm{Arg}\, p_n(s)-\Delta_{C_1}\mathrm{Arg}\, p_{n-1}(s)=\mathrm{Arg}\, \frac{p_n(j\infty)}{p_{n-1}(j\infty)}=\mathrm{Arg}\, \frac{a_nj\omega}{a_{n-1}} ΔC1Argpn(s)−ΔC1Argpn−1(s)=Argpn−1(j∞)pn(j∞)=Argan−1anjω
也就是说,辐角差取决于 a n a_n an 和 a n − 1 a_{n-1} an−1 是否同号,总结一下:
Δ C 1 A r g p n ( s ) − Δ C 1 A r g p n − 1 ( s ) = { − π 2 , if a n a n − 1 > 0 − π 2 , if a n a n − 1 < 0 (5.2.3) \Delta_{C_1}\mathrm{Arg}\, p_n(s)-\Delta_{C_1}\mathrm{Arg}\, p_{n-1}(s)=\begin{cases} \phantom-\frac\pi2,&\text{if}\,a_na_{n-1}>0\\ -\frac\pi2,&\text{if}\,a_na_{n-1}<0 \end{cases} \tag{5.2.3} ΔC1Argpn(s)−ΔC1Argpn−1(s)={ −2π,−2π,ifanan−1>0ifanan−1<0(5.2.3)
Δ C 2 A r g p n ( s ) − Δ C 2 A r g p n − 1 ( s ) = { − π 2 , if a n a n − 1 > 0 − π 2 , if a n a n − 1 < 0 (5.2.4) \Delta_{C_2}\mathrm{Arg}\, p_n(s)-\Delta_{C_2}\mathrm{Arg}\, p_{n-1}(s)=\begin{cases} \phantom-\frac\pi2,&\text{if}\,a_na_{n-1}>0\\ -\frac\pi2,&\text{if}\,a_na_{n-1}<0 \end{cases} \tag{5.2.4} ΔC2Argpn(s)−ΔC2Argpn−1(s)={ −2π,−2π,ifanan−1>0ifanan−1<0(5.2.4)
总结一下(5.2.1)、(5.2.3)、(5.2.4):
Δ C 0 A r g p n ( s ) − Δ C 0 A r g p n − 1 ( s ) = { 2 π , if a n a n − 1 > 0 0 , if a n a n − 1 < 0 (5.2.5) \Delta_{C_0}\mathrm{Arg}\, p_n(s)-\Delta_{C_0}\mathrm{Arg}\, p_{n-1}(s)=\begin{cases} 2\pi,&\text{if}\,a_na_{n-1}>0\\ 0,&\text{if}\,a_na_{n-1}<0 \end{cases} \tag{5.2.5} ΔC0Argpn(s)−ΔC0Argpn−1(s)={ 2π,0,ifanan−1>0ifanan−1<0(5.2.5)
考虑到(5.2.5),根据辐角原理, p_{n-1} 比 p_n 减少一个左半平面零点,当且仅当 a n a n − 1 > 0 a_na_{n-1}>0 anan−1>0 ,故引理2得证。
结合引理1、2,原定理自然成立
六、证明思路梗概
我们注意到,证明的思路核心在于引理1、2,我们通过「辐角原理」将问题转化为 C 0 C_0 C0 围道的辐角问题,系数选择其实也是为了迎合「虚轴零点不变」、「公式(5.1.5)」。在确定好这些后,我们又注意到:C这个半无穷大圆围道会带来π的辐角变化,C1、C2则取决于 j ∞ j\infty j∞ 处的辐角,而 j ∞ j\infty j∞ 处,由于是无穷远的点,自然其辐角取决于 a n a n − 1 a_na_{n-1} anan−1 是否同号。这一系列转换,最终将问题转化为了Rouch表第一列是否同号的问题。
七、参考文献/书籍
- 「何琴芳.证明Routh-Hurwitz稳定性判据的一个简明方法[J].电工教学,1992(03):12-18.」
- 「俞菲,孟桥,樊祥宁.浅谈Routh-Hurwitz判据中的若干应用[J].电气电子教学学报,2013,35(01):12-14.」
- 「曾禹村.信号与系统(第四版)[M].北京:北京理工大学出版社.2018,304-305」
我们在习惯上认为:「虚轴上的一阶极点对应的临界稳定状态」也属于「不稳定状态」 ↩︎
事实上,这样断言是不够严谨的,因为如果此时p(s)也是零点,实部虚部均为0,而复数0的辐角是没有意义的。但我们很容易舍去这种情况,因为根据1的讨论, p n p_n pn和 p n − 1 p_{n-1} pn−1在虚轴上的零点是完全相同的,所以不会对辐角产生影响。 ↩︎