《TCP/IP网络编程》第 11 章 进程间通信 笔记
第 11 章 进程间通信
本章代码,在TCP-IP-NetworkNote中可以找到。
进程间通信,意味着两个不同的进程中可以交换数据
11.1 进程间通信的基本概念
11.1.1 通过管道实现进程间通信
下图是基于管道(PIPE)的进程间通信的模型:
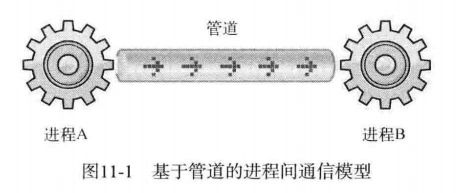
可以看出,为了完成进程间通信,需要创建进程。管道并非属于进程的资源,而是和套接字一样,属于操作系统(也就不是 fork 函数的复制对象)。所以,两个进程通过操作系统提供的内存空间进行通信。下面是创建管道的函数。
#include 父进程创建函数时将创建管道,同时获取对应于出入口的文件描述符,此时父进程可以读写同一管道。但父进程的目的是与子进程进行数据交换,因此需要将入口或出口中的 1 个文件描述符传递给子进程。下面的例子是关于该函数的使用方法:
- pipe1.c
#include 编译运行:
gcc pipe1.c -o pipe1
./pipe1
结果:
Who are you?
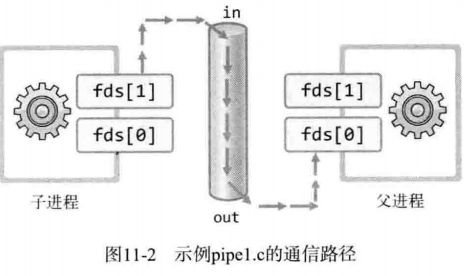
可以从程序中看出,首先创建了一个管道,子进程通过 fds[1] 把数据写入管道,父进程从 fds[0] 再把数据读出来。可以从下图看出:
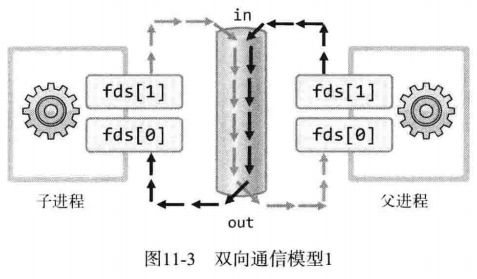
11.1.2 通过管道进行进程间双向通信
下图可以看出双向通信模型:
下面是双向通信的示例:
- pipe2.c
#include 编译运行:
gcc pipe2.c -o pipe2
./pipe2
结果:
Parent proc output: Who are you?
Child proc output: Thank you for your message
运行结果是正确的,但是如果注释掉第18行的代码,就会出现问题,导致一直等待下去。因为数据进入管道后变成了无主数据。也就是通过 read 函数先读取数据的进程将得到数据,即使该进程将数据传到了管道。因为,注释第18行会产生问题。第19行,自己成将读回自己在第 17 行向管道发送的数据。结果父进程调用 read 函数后,无限期等待数据进入管道。
当一个管道不满足需求时,就需要创建两个管道,各自负责不同的数据流动,过程如下图所示:

下面采用上述模型改进 pipe2.c 。
- pipe3.c
#include 上面通过创建两个管道实现了功能,此时,不需要额外再使用 sleep 函数。运行结果和上面一样。
11.2 运用进程间通信
11.2.1 保存消息的回声服务器
下面对第 10 章的 echo_mpserv.c 进行改进,添加一个功能:
将回声客户端传输的字符串按序保存到文件中
实现该任务将创建一个新进程,从向客户端提供服务的进程读取字符串信息,下面是代码:
- echo_storeserv.c
编译运行:
gcc echo_storeserv.c -o serv
./serv 9190
此服务端配合第 10 章的客户端 echo_mpclient.c 使用,运行结果如下图:
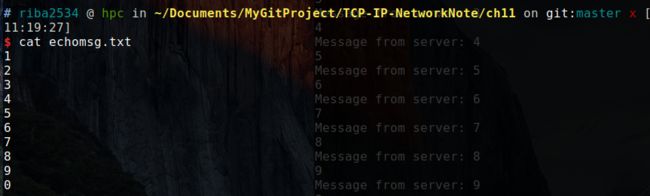
从图上可以看出,服务端已经生成了文件,把客户端的消息保存可下来,只保存了10次消息。
11.3 习题
以下答案仅代表本人个人观点,可能不是正确答案。
-
什么是进程间通信?分别从概念和内存的角度进行说明。
答:进程间通信意味着两个不同的进程间可以交换数据。从内存上来说,就是两个进程可以访问同一个内存区域,然后通过这个内存区域数据的变化来进行通信。
-
进程间通信需要特殊的 IPC 机制,这是由于操作系统提供的。进程间通信时为何需要操作系统的帮助?
答:为了进行进程间通信,需要管道的帮助,但是管道不是进程的资源,它属于从操作系统,所以,两个进程通过操作系统提供的内存空间进行通信。
-
「管道」是典型的 IPC 技法。关于管道,请回答以下问题:
-
管道是进程间交换数据的路径。如何创建此路径?由谁创建?
答:使用 pipe 函数进行创建,由操作系统创建。父进程调用该函数时将创建管道。
-
为了完成进程间通信。2 个进程要同时连接管道。那2 个进程如何连接到同一管道?
答:数组中有两个文件描述符,父子进程调用相关函数时,通过 fork 函数,把 1 个文件描述符传递给子进程。
-
管道允许 2 个进程间的双向通信。双向通信中需要注意哪些内容?
答:向管道传输数据时,先读的进程会把数据取走。简言之,就是数据进入管道候会变成无主数据,所以有时候为了防止错误,需要多个管道来进程通信。
-