图的遍历(深度、广度、最小生成树、最短路径)
有向连通图如下所示
#include
#include
#include
#include
#include
#include
#include
#define MAXV 7 //最大顶点个数
#define INF unsigned short(-1) //定义 ∞
//∞ == INF(表示 两点不可直达)
//深度优先遍历:Depth First Search (DFS)
//广度优先比例:Breadth First Search (BFS)
typedef struct eNode {
int adjVer; //该边的邻接点编号
int weight; //该边的的信息,如权值
struct eNode* nextEdge; //指向下一条边的指针
}EdgeNode; //别名,边结点的类型
typedef struct vNode {
EdgeNode* firstEdge; //指向第一个边结点 (其实数组比较方便)
}VNode; //别名,邻接表的头结点类型
typedef struct list
{
int vertexCnt; //顶点个数
int edgeCnt; //边数
VNode adjList[MAXV]; //邻接表的头结点数组
}ListGraph; //别名,完整的图邻接表类型
// 每个顶点到最近其他顶点的数据
typedef struct closedge
{
int adjVer; // 最近邻接顶点
int weight; // 两顶点的权重
}Closedge;
Closedge PrimClosedge[MAXV] = { 0 };
// 边
typedef struct edge
{
edge(int v1, int v2, int w) :ver1(v1), ver2(v2), weight(w) {}
int ver1; // 顶点1
int ver2; // 顶点2
int weight; // 两顶点的权重
}Edge;
struct EdgeSortFun
{
public:
bool operator()(const Edge& a, const Edge& b)// 按权重升序
{
return a.weight < b.weight;
}
};
// 最短路径:贝尔曼福特算法(Bellman_Ford算法),Floyd算法的优化(因为只针对v0点,从二维降到一维)
// 作用:计算不含负圈图的最短路径 返回是否有圈
// v到各点的距离
bool ShortestPath_Bellman_Ford(int matrix[MAXV][MAXV], int v0 = 0,int val = 6)
{
int D[MAXV] = { 0 }; // v0点到其余各点的距离
int Path[MAXV] = { 0 }; // 前置点
//初始化
for (int i = 0; i < MAXV; i++)
{
D[i] = matrix[v0][i];
if (D[i] && D[i] != INF)
Path[i] = v0; // i为v的邻接点
else
Path[i] = -1;
}
D[v0] = 0;
//初始化结束,开始双重循环
for (int k = 0; k < MAXV ; ++k)
{
for (int i = 0; i < MAXV; ++i) //i为源点
{
for (int j = 0; j < MAXV; j++) //j为终点
{
if (D[i] + matrix[i][j] < D[j])// v0到i + i到j < v0到j
{
D[j] = D[i] + matrix[i][j];// 更新距离
Path[j] = i; // 更新j前置
}
}
}
}
//判断是否含有负圈
bool flag = true;
for (int j = 0; j < MAXV; j++) //j为源点
{
for (int k = 0; k < MAXV - 1; k++) //k为终点
{
if (D[k] > D[j] + matrix[j][k])
{
flag = false;
break;
}
}
}
// 输出
std::cout << v0 << "点到其他各点的最短路径:" << std::endl;
for (int i = 0; i < MAXV; ++i)
{
if (i != v0)
{
std::cout << "--> 点" << i;
if (D[i] != INF)
std::cout << " 距离为: " << D[i] << std::endl;
else
std::cout << " 不可达" << std::endl;
}
}
std::cout << "顶点" << v0 << " 到 " << val << "的路径为:" << std::endl;
std::cout << val << "<-";;
while (Path[val] != 0)
{
std::cout << Path[val] << "<-";
val = Path[val];
}
std::cout << v0 << std::endl;
return flag;
}
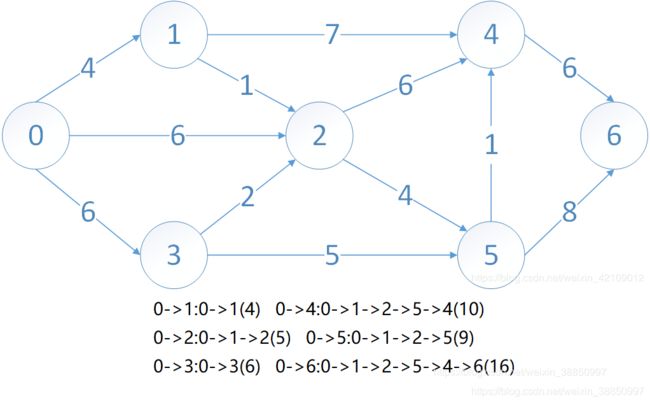
// 最短路径:迪杰斯特拉算法(Dijkstra算法)
// 计算v0点到其他点的最短距离
void ShortestPath_Dijkstra(int matrix[MAXV][MAXV], int v0 = 0, int val = 6)
{
std::cout << v0 << "点到其他各点的最短路径:" << std::endl;
bool S[MAXV] = { 0 }; // v0到vi点的最短路径是否已经被确定
int D[MAXV] = { 0 }; // v0到vi点的最短路径,否则为INF
int Path[MAXV] = { 0 }; // vo到vi的最短路径上vi的(当前)前驱节点,默认-1
for (int i = 0; i < MAXV; ++i)
{
S[i] = false;
D[i] = matrix[v0][i];
if (D[i] && D[i] != INF)// i点是v0点的邻接点(v0为前驱顶点)
Path[i] = v0;
else
Path[i] = -1;// 当前点 或是 非邻接点
}
// 当前点
S[v0] = true;
D[v0] = 0;
Path[v0] = -1;
// 循环,每次求得v0到某个顶点v的最短路径,将v加入到S
for (int i = 1; i < MAXV; ++i)
{
int min = INF;
int v = -1; // 顶点v
// 遍历D,找到没被确定的距离最短的那个点
for (int j = 0; j < MAXV; ++j)
{
if (!S[j] && D[j] < min)// j该点没被确定 且 到该点的路径较短
{
v = j; // 记录当前v0能到达距离最短的那个点v
min = D[j]; // 记录当前v0能到达点的最小距离
}
}
if (v != -1)
S[v] = true;// 确定到v点为最短
else
continue;
for (int j = 0; j < MAXV; ++j)
{
if (!S[j] && (D[v] + matrix[v][j] < D[j]))// 从剩余没被确定的点j中,比较 [v0到v的距离(已确定) + 点v到j的距离](该距离为增加中间新顶点后,v0到j的新可达路径v0->v->j的距离) 和 当前j到点v0的距离(原j到v0的最短库里),选取较小的值
{ // 如顶点0->1,0->2的原路径为0->1,0->2,最短分别为D[1]=4,D[2]=6,由于v(点1)被确定到S,得到新路径 v0->v(点1)->j(点2),最短为D[v] + matrix[v][j] = 5 < D[j] = 6;更新j(2)到原点的距离
D[j] = D[v] + matrix[v][j];
Path[j] = v; // v中间节点为新的前置节点
}
}
}
// 输出
for (int i = 0; i < MAXV; ++i)
{
if (i != v0)
{
std::cout << "--> 点" << i;
if (D[i] != INF)
std::cout << " 距离为: " << D[i] << std::endl;
else
std::cout << " 不可达" << std::endl;
}
}
std::cout << "顶点" << v0 << " 到 " << val << "的路径为:" << std::endl;
std::cout << val << "<-";;
while (Path[val] != 0)
{
std::cout << Path[val] << "<-";
val = Path[val];
}
std::cout << v0 << std::endl;
}
// 最短路径:弗洛伊德算法(Floyd算法)
// 输出v0点到其他点的最短距离
void ShortestPath_Floyd(int matrix[MAXV][MAXV], int v0 = 0, int val = 6)
{
int D[MAXV][MAXV] = { 0 }; // D[i][j],记录两顶点i,j的最短距离
int Path[MAXV][MAXV] = { 0 }; // Path[i][j],记录顶点i到j路径上,j当前的前置顶点
for (int i = 0; i < MAXV; ++i)
{
for (int j = 0;j < MAXV; ++j)
{
D[i][j] = matrix[i][j];// 初始化顶点i到到j的当前最短距离
// 初始化每个顶点到其他顶点的前置顶点
if (D[i][j] && D[i][j] != INF) // 邻接点
Path[i][j] = i;
else
Path[i][j] = -1;
}
}
for (int k = 0; k < MAXV; ++k) // 假设从i到j要经过k
{
for (int i = 0; i < MAXV; ++i)
{
for (int j = 0; j < MAXV; ++j)
{
if (D[i][k] + D[k][j] < D[i][j])
{
D[i][j] = D[i][k] + D[k][j];
Path[i][j] = Path[k][j]; // 更改j的前驱为k
}
}
}
}
// 输出
std::cout << v0 << "点到其他各点的最短路径:" << std::endl;
for (int i = 0; i < MAXV; ++i)
{
if (i != v0)
{
std::cout << "--> 点" << i;
if (D[v0][i] != INF)
std::cout << " 距离为: " << D[v0][i] << std::endl;
else
std::cout << " 不可达" << std::endl;
}
}
std::cout << "顶点" << v0 << " 到 " << val << "的路径为:" << std::endl;
std::cout << val << "<-";;
while (Path[v0][val] != 0)
{
std::cout << Path[v0][val] << "<-";
val = Path[v0][val];
}
std::cout << v0 << std::endl;
}
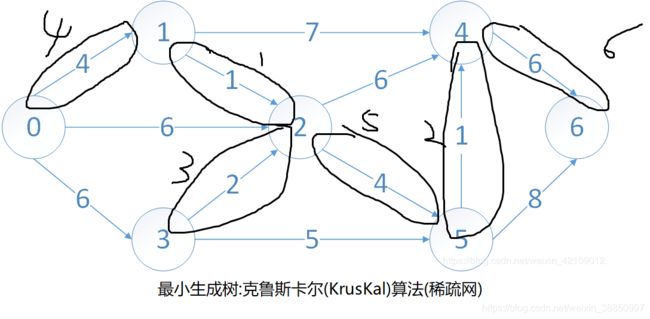
// 最小生成树:克鲁斯卡尔算法(kruskal算法)
void MiniSpanTree_Kruskal(int matrix[MAXV][MAXV])
{
int vexset[MAXV] = { 0 };// 联通分量
for (int i = 0; i < MAXV; ++i)
{
vexset[i] = i;// 初始化每个点为联通分量
}
std::deque edge;
for (int i = 0; i < MAXV; ++i)
{
for (int j = 0; j < MAXV; ++j)
{
if (matrix[i][j] && matrix[i][j] != INF)
{
Edge e(i, j, matrix[i][j]);
edge.push_back(e);
}
}
}
std::sort(edge.begin(), edge.end(), EdgeSortFun());
for (int i = 0; i < MAXV && !edge.empty(); )
{
// 当前最小变得两个顶点
int v1 = edge.front().ver1;
int v2 = edge.front().ver2;
// 两个点的所在联通分量
int vs1 = vexset[v1];
int vs2 = vexset[v2];
if (vs1 != vs2)// 若相同则出现环
{
std::cout << "边:顶点" << v1 << "--" << v2 << std::endl;
for (int j = 0; j < MAXV; ++j)// 用for循环是因为,你不知道vs1和vs2下,联通分量中的顶点数是1:n还是n:1,如果能立马判断出vs1下的是1的话,只需要vexset[v1] = vs2即可
{
if (vexset[j] == vs2) vexset[j] = vs1;// 都改成同一个联通分量,所以if (vexset[j] == vs1) vexset[j] = vs2;也行
}
++i;
}
edge.pop_front();
}
int c = 0;
}
int Min(Closedge PrimClosedge[MAXV])
{
int min = INF;
int idx = -1;
for (int i = 0; i < MAXV; ++i)
{
if (PrimClosedge[i].weight > 0 && PrimClosedge[i].weight < min)
{
min = PrimClosedge[i].weight;
idx = i;
}
}
return idx;
}
// U表示已经有选定最小边的顶点(起始为rootVer),V表示所有顶点
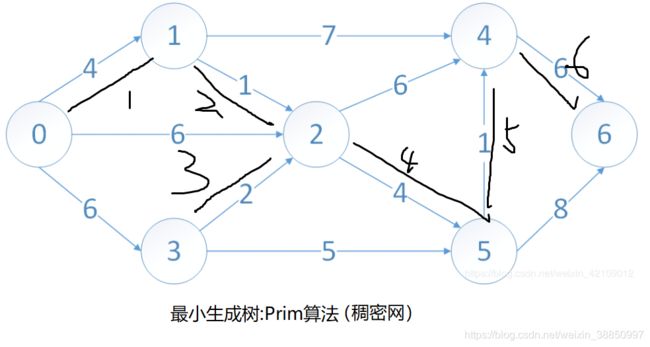
// 最小生成树:普拉姆(prim算法),根据邻接矩阵表示
void MiniSpanTree_Prim(int matrix[MAXV][MAXV], int rootVer = 0)
{
// 根节点(U={rootVer(0)}) 到 其他节点的最小距离
for (int i = 0; i < MAXV; ++i)
{
if (i != rootVer)// 其他节点
{
PrimClosedge[i].adjVer = rootVer;
PrimClosedge[i].weight = matrix[rootVer][i];
}
}
for (int i = 1; i < MAXV; ++i)
{
int minVerIdx = Min(PrimClosedge); // 当前最小边的那个顶点
if (minVerIdx == -1) break;// 非连通图出错
int u = PrimClosedge[minVerIdx].adjVer; // 该边的一个顶点 u 属于U
int v = minVerIdx; // 该边的另一个顶点 v 属于V-U
std::cout << "边:顶点" << u << "--" << v << std::endl;
PrimClosedge[minVerIdx].weight = 0; // 顶点并入U,(即v到u顶点的边不用在计算了)
// U += {minVerIdx}
// 比较其u,v到 他节点j的权重,若uj > vj;则修改j目前的最近邻接顶点为v
for (int j = 0; j < MAXV; ++j)
{
if (matrix[minVerIdx][j] < PrimClosedge[j].weight)// 比较 当前最小边的顶点v和u 分别 到 其他顶点 的权重
{
// 如在确定0(u)--1(v)边后,matrix[1][2] = 1(1到2的权重) < PrimClosedge[2].weight = 6(0到2的权重)
// 得到PrimClosedge[2].adjVer = 1;即U{0,1}中的1 到 2 最近
PrimClosedge[j].adjVer = minVerIdx;
PrimClosedge[j].weight = matrix[minVerIdx][j];
}
}
}
return;
}
//创建图的邻接表
void CreateAdjListGraph(ListGraph* &LG, int matrix[MAXV][MAXV], int vertexCnt, int edgeCnt)
{
int i, j;
EdgeNode* p;
LG = (ListGraph*)malloc(sizeof(ListGraph));
for (i = 0; i < vertexCnt; i++)
{
LG->adjList[i].firstEdge = NULL; //给邻接表中所有头结点指针域置初值
}
for (i = 0; i < vertexCnt; i++) //检查邻接矩阵中的每个顶点元素
{
for (j = vertexCnt - 1; j >= 0; j--) // 该顶点到其余点的数据
{
//if (matrix[i][j] != 0) //存在一条边
{
p = (EdgeNode*)malloc(sizeof(EdgeNode)); //申请一个结点内存
p->adjVer = j; //存放邻接点
p->weight = matrix[i][j]; //存放权值
p->nextEdge = NULL;
p->nextEdge = LG->adjList[i].firstEdge; //头插法
LG->adjList[i].firstEdge = p;
}
}
}
LG->vertexCnt = vertexCnt;
LG->edgeCnt = edgeCnt;
}
//输出邻接表
void DisplayAdjList(ListGraph* LG)
{
int i;
EdgeNode* p;
for (i = 0; i < MAXV; i++)
{
p = LG->adjList[i].firstEdge;
printf("%d:", i);
while (p != NULL)
{
if (p->weight != INF) // 输出当前等点能直达的邻接顶点信息
{
printf("%2d[%d]->", p->adjVer, p->weight);
}
p = p->nextEdge;
}
printf(" NULL\n");
}
}
//深度优先遍历
bool visitedDFS[MAXV] = { 0 }; //全局数组,记录当前顶点是否已经遍历
void DFS(ListGraph* LG, int matrix[MAXV][MAXV], int v)
{
/*
// 通过邻接表遍历
EdgeNode* p;
visitedDFS[v] = true; //记录已访问
std::cout << v << " "; //输出顶点编号
p = LG->adjList[v].firstEdge; //p 指向顶点 v 的第一个邻接点
while (p)
{
if (!visitedDFS[p->adjVer] && p->weight != INF) //如果下一个邻接节点 p->adjVer 没被访问,递归访问它
{
DFS(LG, p->adjVer);
}
p = p->nextEdge; //p 指向顶点 v 的下一个邻接点
}
*/
// 通过邻接矩阵遍历
std::cout << v << " ";
visitedDFS[v] = true;
for (int i = 0; i < MAXV; ++i)
{
if (matrix[v][i] && matrix[v][i] != INF && !visitedDFS[i])
{
DFS(LG, matrix, i);
}
}
}
void DFS1(ListGraph* LG, int matrix[MAXV][MAXV])
{
memset(visitedDFS, 0, sizeof(visitedDFS));
for (int i = 0; i < LG->vertexCnt; ++i)
{
if (!visitedDFS[i])
DFS(LG, matrix, i);
}
}
bool visitedBFS[MAXV] = { 0 };
//广度优先遍历
void BFS(ListGraph* LG, int matrix[MAXV][MAXV], int v)
{
/*通过邻接表遍历*/
/*
std::deque d;
visitedBFS[v] = true;
d.push_back(LG->adjList[v].firstEdge);
std::cout << v << " ";
while (!d.empty())
{
EdgeNode* p = LG->adjList[d.front()->adjVer].firstEdge; // 下一个访问的邻接节点的头结点
d.pop_front();
while (p)
{
if (!visitedBFS[p->adjVer] && p->weight != INF) // 未访问过
{
std::cout << p->adjVer << " ";
d.push_back(p); // 未访问过的邻接节点的头结点
visitedBFS[p->adjVer] = true;
}
p = p->nextEdge;
}
}
*/
// 通过邻接矩阵遍历
std::deque d;
d.push_back(v);
visitedBFS[v] = true;
while (!d.empty())
{
int front = d.front();
for (int i = 0; i < MAXV; ++i)
{
if (matrix[front][i] && matrix[front][i] != INF && !visitedBFS[i])
{
visitedBFS[i] = true;
d.push_back(i);
}
}
std::cout << front << " ";
d.pop_front();
}
}
void BFS1(ListGraph* LG, int matrix[MAXV][MAXV])
{
memset(visitedBFS, 0, sizeof(visitedBFS));
for (int i = 0; i < LG->vertexCnt; ++i)
{
if (!visitedBFS[i])
BFS(LG, matrix, i);
}
}
int main()
{
ListGraph* LG = nullptr;
// 对应的邻接矩阵
int matrix[MAXV][MAXV] =
{
(有向非连通图,顶点6独立)
//{ 0, 4, 6, 6, INF, INF, INF },
//{ INF, 0, 1, INF, 7, INF, INF },
//{ INF, INF, 0, INF, 6, 4, INF },
//{ INF, INF, 2, 0, INF, 5, INF },
//{ INF, INF, INF, INF, 0, INF, INF },
//{ INF, INF, INF, INF, 1, 0, INF },
//{ INF, INF, INF, INF, INF, INF, 0 }
// 有向连通图
{ 0, 4, 6, 6, INF, INF, INF },
{ INF, 0, 1, INF, 7, INF, INF },
{ INF, INF, 0, INF, 6, 4, INF },
{ INF, INF, 2, 0, INF, 5, INF },
{ INF, INF, INF, INF, 0, INF, 6 },
{ INF, INF, INF, INF, 1, 0, 8 },
{ INF, INF, INF, INF, INF, INF, 0 }
无向连通图
//{ 0, 4, 6, 6, INF, INF, INF },
//{ 4, 0, 1, INF, 7, INF, INF },
//{ 6, 1, 0, 2, 6, 4, INF },
//{ 6, INF, 2, 0, INF, 5, INF },
//{ INF, 7, 6, INF, 0, 1, 6 },
//{ INF, INF, 4, 5, 1, 0, 8 },
//{ INF, INF, INF, INF, 6, 8, 0 }
};
int edgeCnt = 12;// 两个点之间连线,即边Edge的数量,通过遍历上述数组,统计非0和INF数量即可
CreateAdjListGraph(LG, matrix, MAXV, edgeCnt);
std::cout << "邻接表为:" << std::endl;
DisplayAdjList(LG);
std::cout << std::endl;
std::cout << "深度优先遍历为(仅适用于非连通图):" << std::endl;
DFS(LG, matrix, 0); // 0 1 2 4 6 5 3
std::cout << std::endl;
std::cout << "深度优先遍历为(也使用非连通图):" << std::endl;
DFS1(LG, matrix);
std::cout << std::endl;
std::cout << "广度优先遍历为(仅适用于非连通图):" << std::endl;
BFS(LG, matrix, 0); // 0 1 2 3 4 5 6
std::cout << std::endl;
std::cout << "广度优先遍历为(也使用非连通图):" << std::endl;
BFS1(LG, matrix);
std::cout << std::endl;
std::cout << "Prim算法:最小生成树的各边:" << std::endl;
MiniSpanTree_Prim(matrix, 0);
std::cout << "Kruskal算法:最小生成树的各边:" << std::endl;
MiniSpanTree_Kruskal(matrix);
std::cout << "Dijkstra算法:最短路径:" << std::endl;
ShortestPath_Dijkstra(matrix, 0);
std::cout << "Floyd算法:最短路径:" << std::endl;
ShortestPath_Floyd(matrix, 0);
std::cout << "Bellman_Ford算法:最短路径:" << std::endl;
ShortestPath_Bellman_Ford(matrix, 0);
return 0;
}