unity里的正交投影和透视投影
本文之前一直纠结的问题是unity里面的正交矩阵和透视矩阵中的z到底是映射到[-1,1]还是[0,1]区间。
经过验证之后,得出结论:
unity里的正交和透视矩阵是将z映射到[-1,1]区间。
经过查询,知道了,opengl把z映射到[-1,1]之间;而dx则将z映射到[0,1]区间。
可以查看:
https://knowledge.autodesk.com/search-result/caas/CloudHelp/cloudhelp/2017/ENU/Maya-SDK/files/GUID-3824AD22-F46C-4806-9884-2C6292468762-htm.html

有上面也知道了,dx是左手坐标系,而opengl是右手坐标系,而unity呢?我们会发现它使用的是左手坐标系。

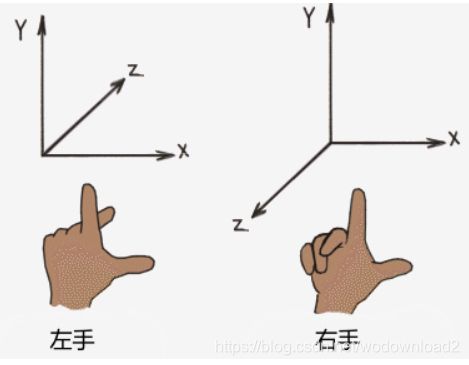
左手坐标系、右手坐标系,下图可以直观的给出:
判定方法,摘自网络,原文如下:
1.左手坐标系: 伸开我们的左手, 掌心向外, 大拇指与食指成90度, 中指、无名指和小指弯曲, 大拇指指向的方向就是X轴正方向, 食指指向的方向就是Y轴正方向, 中指、无名指和小指指向的方向就是Z轴正方向。
2.右手坐标系: 伸开我们的右手, 掌心向内, 大拇指与食指成90度, 中指、无名指和小指弯曲, 大拇指指向的方向就是X轴正方向, 食指指向的方向就是Y轴正方向, 中指、无名指和小指指向的方向就是Z轴正方向。
3.左手坐标系和右手坐标系中, X轴和Y轴的方向是相同的, Z轴的方向相反。
---------------------
原文:https://blog.csdn.net/aihiao/article/details/80073477
ok,了解了这么多,我们还要看下opengl的正交透视投影,以及透视投影的矩阵公式,推导这里就不要再叙述了,网上很多,我之前的博客也都写过,这里给出几个参考网址:
https://blog.csdn.net/popy007/article/details/1797121
https://blog.csdn.net/wangdingqiaoit/article/details/51589825
https://blog.csdn.net/wodownload2/article/details/52084300
这里还有一个不明白的地方就是在推导的时候,使用-N和-F。
还有一个地方不明的是,unity里面的摄像机的正方向,指向的是世界坐标系的-z轴。仿佛所有摄像机能看到的物体,都是在摄像机的后面。
有图说明:
上图,camera的位置是(0,0,0),其旋转为(0,0,0),那么打印其worldToCameraMatrix,也就是世界坐标转换为视口坐标的矩阵。
Debug.Log(Camera.main.worldToCameraMatrix);
输出:

我们知道,凡是坐标系的矩阵的前三维代表的是xyz轴向量。
也就是摄像机的视口坐标系的三个轴是:
(1,0,0)
(0,1,0)
(0,0,-1)
由此知道,其z方向,和世界坐标系居然是相反的。
ok,这个只要知道就可以了,对我们的要验证的问题没有关系。
接着我们回到正交矩阵的验证问题上来:
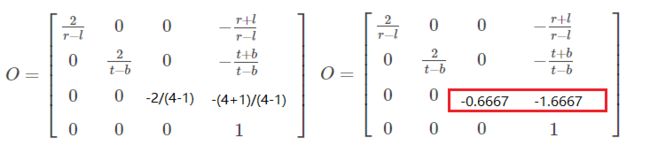
首先,把z坐标映射到-1到1的正交投影矩阵公式如下:

我们来验证下:

这里的摄像机其近平面设置为1,远平面设置为4,也就是n=1,f=4
此时看下输出:
Debug.Log(Camera.main.projectionMatrix);

可以看到矩阵对第三行是验证正确。
再来看下矩阵的第一行和第二行。
当我们把另r=-l,以及t=-b的时候,
矩阵变为:

也就是:
1/r = 0.16667
1/t = 0.3333
此时r = 6,t = 3
这个是反推出r和t的。
ok,验证成立。
那么反思下,这个r和t的代表了什么,我们知道width=r-l=2r=12;而height=t-b=2t=6
那么此时宽高比是12:6=2:1,
那么此时我们的屏幕尺寸是多少呢?
Debug.Log(Screen.width + " " + Screen.height);
Debug.LogError(Screen.height * 1.0f / Screen.width);
Debug.LogError(Screen.width * 1.0f / Screen.height);

是的,我们屏幕的宽高比正好是2:1。
你可以选择,其他的分别测试:
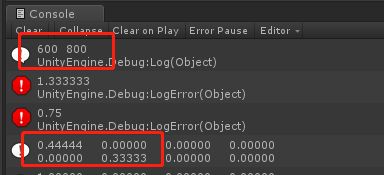
如屏幕是600x800,那么此时的比例是3:4=0.75,而0.3333/0.4444=0.75。验证是正确的。
我们再反思,我们的摄像机是正交的,那么屏幕的的比例,就是摄像机的宽高比。
下面要讲解的是如何将一个点映射到ndc空间了。
我们知道了给出了正交投影矩阵了,任何一个摄像机空间内的点p(x,y,z),只要经过这个矩阵的变换,则最终都被映射到了[-1,1]的空间了。其中包括x和y和z。上面已经提到unity里面才用的是opengl的映射方式,将z映射到-1到1之间。
下面我们准备两个立方体:
立方体1
立方体2

摄像机
立方体1的坐标是(0,0,1),立方体2的坐标是(0,0,4),他们都是摄像机的子节点,而摄像机的坐标是(0,0,0)。
也就是立方体1的最终世界坐标是(0,0,1),立方体2的最终坐标是(0,0,4)。
我们推测下,由于,摄像机的近平面是1,远平面是4,所以可以推测,立方体1的z=1,最终被映射到了-1,而立方体2的z=4,最终被映射到了1。
映射代码如下:
Debug.LogError(Camera.main.projectionMatrix.MultiplyPoint(Camera.main.worldToCameraMatrix.MultiplyPoint(cube.transform.position)));
Debug.LogError(Camera.main.projectionMatrix.MultiplyPoint(Camera.main.worldToCameraMatrix.MultiplyPoint(cube2.transform.position)));
其输出是:

推测争取。
下面,再来,我们试图将立方体1的y变为2,而立方体2的y变为-1,看其y轴映射对不对。
我们上面知道了摄像机的t=3,b=-3。
所以,推测立方体1的y,映射应该是2/3=0.6667
而立方体2的y,映射为-1/3=-0.3333

验证正确。
ok,至此unity里面的正交投影矩阵验证正确。
下面是验证透视投影矩阵了,我们把摄像机变为透视模式:

其属性设置为:
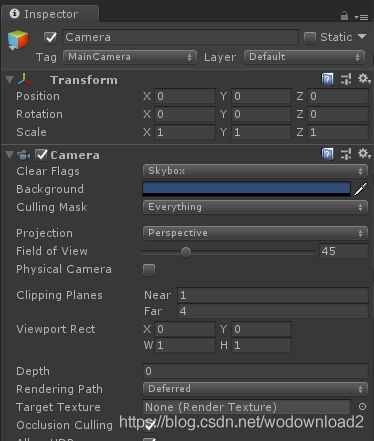
摄像机的近平面为1,远平面为4。
其投影矩阵为:

我们这里的n=1,f=4,r=-l, t=-b带入上面的矩阵:

输出:

可以看到第三行验证相同。
再来反推:t和r。
1/r = 3.21895,得到r=0.31
1/t = 2.41421,得到t=0.414
θ = 45度。
aspect = w/h = r/t,带入下面的公式,结果也是正确的。

下面就是验证z的映射是否争取了,我们另立方体1的z=1,立方体2的z=4,验证其投影映射之后的z值。

也就是说立方体1的z在近平面被映射为-1,而立方体2的z在远平面被映射为了1,结果正确。
其他关于x和y的映射带入也是满足的。
至此,unity中正交投影和透视投影的矩阵验证正确,网上推导的矩阵是真实可以用的。
最后给出项目的地址: