【码上实战】【立体匹配系列】经典AD-Census: (5)扫描线优化
同学们国庆假期快乐呀!潇洒7天(带娃7天),难得坐下来更新博客。
下载完整源码,点击进入: https://github.com/ethan-li-coding/AD-Census
欢迎同学们在Github项目里讨论!
接上篇十字交叉域代价聚合,本篇的内容是AD-Census的扫描线优化步骤,实际上,该步的思路和SGM的代码聚合是基本一样的,只不过在P1/P2参数设置上做了一些修改。确实,SGM的P1、P2设置策略过于简单,优点是鲁棒性高,对大部分数据都能得到一个还不错的视差结果,但明显的弊端就是很难找到一组特别好的参数组合,使特定应用场景的数据达到比较完美的状态,P1/P2的设置对整体视差效果尤其是边缘处的视差很关键,所以AD-Census的改进方向是有实际意义的。
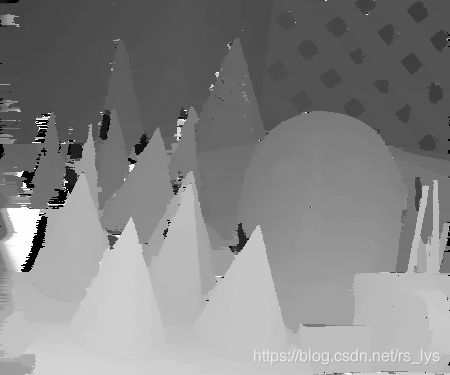
我们不妨直接先看下AD-Census扫描线优化的成果:

|

|

|

|
显然,扫描线优化后的视差图比代价聚合后的视差图更加完整,错误值更少。当然这并不能说明AD-Census的参数改进就是有效的,只能说明扫描线优化步骤是有效的。
我们来看编码介绍吧!
文章目录
-
- 算法
- 代码实现
-
- 类设计
-
- 成员函数
- 成员变量
- 类实现
- 实验
算法
同样的,算法原理请看博文:
经典AD-Census: (3)扫描线优化(Scanline Optimization)
这里我就不再展开讲优化的原理了,和SGM(SemiGlobalMatching)的代价聚合策略确实是一模一样,看博主往期博客就行了,AD-Census采用4方向的扫描线优化,即上下左右4个方向。
AD-Census所做的修改在于 P 1 P_1 P1和 P 2 P_2 P2值的设定方式,在SGM中, P 1 P_1 P1、 P 2 ′ P_2' P2′是预设的固定值,实际使用的 P 2 P_2 P2是根据左视图相邻两个像素的亮度差值而实时调整的,调整公式为 P 2 = P 2 ′ / ( I p − I q ) P_2=P_2'/(I_p-I_q) P2=P2′/(Ip−Iq)。
而在Ad-Census中, P 1 P_1 P1、 P 2 P_2 P2不只是和左视图的相邻像素颜色差 D 1 = D c ( p , p − r ) D_1=D_c(p,p-r) D1=Dc(p,p−r)有关,而且和右视图对应同名点的相邻像素颜色差 D 2 = D c ( p d , p d − r ) D_2=D_c(pd,pd-r) D2=Dc(pd,pd−r)有关。
(注1:AD-Census算法默认输入彩色图,所以是算颜色差,如果是输入灰度图,则是亮度差,颜色差的定义是 D c ( p l , p ) = m a x i = R , G , B ∣ I i ( p l ) − I i ( p ) ∣ D_c(p_l,p)=max_{i=R,G,B}|I_i(p_l)-I_i(p)| Dc(pl,p)=maxi=R,G,B∣Ii(pl)−Ii(p)∣,即三个颜色分量差值的最大值)
(注2: p d pd pd 实际就是像素 p p p 通过视差 d d d 找到的右视图上的同名点 q = p − d q=p-d q=p−d)
(注3: p − r p-r p−r代表聚合方向上的上一个像素,比如从左到右聚合,则 p − r p-r p−r就是 p − 1 p-1 p−1;从右到左聚合,则 p − r p-r p−r就是 p + 1 p+1 p+1)
具体设定规则如下:
- P 1 = Π 1 , P 2 = Π 2 , i f D 1 < τ S O , D 2 < τ S O P_1=Π_1,P_2=Π_2, if D_1<τ_{SO},D_2<τ_{SO} P1=Π1,P2=Π2,ifD1<τSO,D2<τSO
- P 1 = Π 1 / 4 , P 2 = Π 2 / 4 , i f D 1 < τ S O , D 2 > τ S O P_1=Π_1/4,P_2=Π_2/4, if D_1<τ_{SO},D_2>τ_{SO} P1=Π1/4,P2=Π2/4,ifD1<τSO,D2>τSO
- P 1 = Π 1 / 4 , P 2 = Π 2 / 4 , i f D 1 > τ S O , D 2 < τ S O P_1=Π_1/4,P_2=Π_2/4, if D_1>τ_{SO},D_2<τ_{SO} P1=Π1/4,P2=Π2/4,ifD1>τSO,D2<τSO
- P 1 = Π 1 / 10 , P 2 = Π 2 / 10 , i f D 1 > τ S O , D 2 > τ S O P_1=Π_1/10,P_2=Π_2/10, if D_1>τ_{SO},D_2>τ_{SO} P1=Π1/10,P2=Π2/10,ifD1>τSO,D2>τSO
Π 1 , Π 2 Π_1,Π_2 Π1,Π2是设定的固定阈值, τ S O τ_{SO} τSO是设定的颜色差阈值。
代码实现
类设计
成员函数
同样,我们用一个扫描线优化器类ScanlineOptimizer来实现该功能。放在文件scanline_optimizer.h/scanline_optimizer.cpp中。
/**
* \brief 扫描线优化器
*/
class ScanlineOptimizer {
public:
ScanlineOptimizer();
~ScanlineOptimizer();
}
在公有成员函数的设计上,第一类接口是必不可少的 设置数据SetData 以及 设置参数SetParam ,完成算法的输入。第二类就是优化功能接口 Optimize 。
而具体的优化子步骤,我们放在私有成员函数列表里,包括水平方向聚合 CostAggregateLeftRight 以及竖直方向聚合 CostAggregateUpDown。
同时,算法需要的一个小功能颜色距离计算函数 ColorDist,也放在私有函数中。
所有成员函数的声明代码如下:
public:
ScanlineOptimizer();
~ScanlineOptimizer();
/**
* \brief 设置数据
* \param img_left // 左影像数据,三通道
* \param img_right // 右影像数据,三通道
* \param cost_init // 初始代价数组
* \param cost_aggr // 聚合代价数组
*/
void SetData(const uint8* img_left, const uint8* img_right, float32* cost_init, float32* cost_aggr);
/**
* \brief
* \param width // 影像宽
* \param height // 影像高
* \param min_disparity // 最小视差
* \param max_disparity // 最大视差
* \param p1 // p1
* \param p2 // p2
* \param tso // tso
*/
void SetParam(const sint32& width,const sint32& height, const sint32& min_disparity, const sint32& max_disparity, const float32& p1, const float32& p2, const sint32& tso);
/**
* \brief 优化 */
void Optimize();
private:
/**
* \brief 左右路径聚合 → ←
* \param cost_so_src 输入,SO前代价数据
* \param cost_so_dst 输出,SO后代价数据
* \param is_forward 输入,是否为正方向(正方向为从左到右,反方向为从右到左)
*/
void CostAggregateLeftRight(const float32* cost_so_src, float32* cost_so_dst, bool is_forward = true);
/**
* \brief 上下路径聚合 ↓ ↑
* \param cost_so_src 输入,SO前代价数据
* \param cost_so_dst 输出,SO后代价数据
* \param is_forward 输入,是否为正方向(正方向为从上到下,反方向为从下到上)
*/
void CostAggregateUpDown(const float32* cost_so_src, float32* cost_so_dst, bool is_forward = true);
/** \brief 计算颜色距离 */
inline sint32 ColorDist(const ADColor& c1, const ADColor& c2) {
return std::max(abs(c1.r - c2.r), std::max(abs(c1.g - c2.g), abs(c1.b - c2.b)));
}
为每个函数都写了清晰的注释,便于快速理解。此外计算颜色距离的函数为内联函数,声明的同时也定义实现了它。
成员变量
成员变量全部都被设计为私有,仅在算法内部使用,他们是图像尺寸、影像数据、代价数据(初始/聚合)、算法参数等。
private:
/** \brief 图像尺寸 */
sint32 width_;
sint32 height_;
/** \brief 影像数据 */
const uint8* img_left_;
const uint8* img_right_;
/** \brief 初始代价数组 */
float32* cost_init_;
/** \brief 聚合代价数组 */
float32* cost_aggr_;
/** \brief 最小视差值 */
sint32 min_disparity_;
/** \brief 最大视差值 */
sint32 max_disparity_;
/** \brief 初始的p1值 */
float32 so_p1_;
/** \brief 初始的p2值 */
float32 so_p2_;
/** \brief tso阈值 */
sint32 so_tso_;
类实现
由于SetData和SetParam比较简单,代码量也很少,所以就不做介绍了,大家看代码就懂了。这里就介绍下扫描线优化的两个子步骤 CostAggregateLeftRight和 CostAggregateUpDown。
实际上,我是直接把SGM的代价聚合代码搬过来,修改 P 1 P_1 P1和 P 2 P_2 P2值的计算方式就行了。如下:
void ScanlineOptimizer::CostAggregateLeftRight(const float32* cost_so_src, float32* cost_so_dst, bool is_forward)
{
const auto width = width_;
const auto height = height_;
const auto min_disparity = min_disparity_;
const auto max_disparity = max_disparity_;
const auto p1 = so_p1_;
const auto p2 = so_p2_;
const auto tso = so_tso_;
assert(width > 0 && height > 0 && max_disparity > min_disparity);
// 视差范围
const sint32 disp_range = max_disparity - min_disparity;
// 正向(左->右) :is_forward = true ; direction = 1
// 反向(右->左) :is_forward = false; direction = -1;
const sint32 direction = is_forward ? 1 : -1;
// 聚合
for (sint32 y = 0u; y < height; y++) {
// 路径头为每一行的首(尾,dir=-1)列像素
auto cost_init_row = (is_forward) ? (cost_so_src + y * width * disp_range) : (cost_so_src + y * width * disp_range + (width - 1) * disp_range);
auto cost_aggr_row = (is_forward) ? (cost_so_dst + y * width * disp_range) : (cost_so_dst + y * width * disp_range + (width - 1) * disp_range);
auto img_row = (is_forward) ? (img_left_ + y * width * 3) : (img_left_ + y * width * 3 + 3 * (width - 1));
const auto img_row_r = img_right_ + y * width * 3;
sint32 x = (is_forward) ? 0 : width - 1;
// 路径上当前颜色值和上一个颜色值
ADColor color(img_row[0], img_row[1], img_row[2]);
ADColor color_last = color;
// 路径上上个像素的代价数组,多两个元素是为了避免边界溢出(首尾各多一个)
std::vector<float32> cost_last_path(disp_range + 2, Large_Float);
// 初始化:第一个像素的聚合代价值等于初始代价值
memcpy(cost_aggr_row, cost_init_row, disp_range * sizeof(float32));
memcpy(&cost_last_path[1], cost_aggr_row, disp_range * sizeof(float32));
cost_init_row += direction * disp_range;
cost_aggr_row += direction * disp_range;
img_row += direction * 3;
x += direction;
// 路径上上个像素的最小代价值
float32 mincost_last_path = Large_Float;
for (auto cost : cost_last_path) {
mincost_last_path = std::min(mincost_last_path, cost);
}
// 自方向上第2个像素开始按顺序聚合
for (sint32 j = 0; j < width - 1; j++) {
color = ADColor(img_row[0], img_row[1], img_row[2]);
const uint8 d1 = ColorDist(color, color_last);
uint8 d2 = d1;
float32 min_cost = Large_Float;
for (sint32 d = 0; d < disp_range; d++) {
const sint32 xr = x - d;
if (xr > 0 && xr < width - 1) {
const ADColor color_r = ADColor(img_row_r[3 * xr], img_row_r[3 * xr + 1], img_row_r[3 * xr + 2]);
const ADColor color_last_r = ADColor(img_row_r[3 * (xr - direction)],
img_row_r[3 * (xr - direction) + 1],
img_row_r[3 * (xr - direction) + 2]);
d2 = ColorDist(color_r, color_last_r);
}
// 计算P1和P2
float32 P1(0.0f), P2(0.0f);
if (d1 < tso && d2 < tso) {
P1 = p1; P2 = p2;
}
else if (d1 < tso && d2 >= tso) {
P1 = p1 / 4; P2 = p2 / 4;
}
else if (d1 >= tso && d2 < tso) {
P1 = p1 / 4; P2 = p2 / 4;
}
else if (d1 >= tso && d2 >= tso) {
P1 = p1 / 10; P2 = p2 / 10;
}
// Lr(p,d) = C(p,d) + min( Lr(p-r,d), Lr(p-r,d-1) + P1, Lr(p-r,d+1) + P1, min(Lr(p-r))+P2 ) - min(Lr(p-r))
const float32 cost = cost_init_row[d];
const float32 l1 = cost_last_path[d + 1];
const float32 l2 = cost_last_path[d] + P1;
const float32 l3 = cost_last_path[d + 2] + P1;
const float32 l4 = mincost_last_path + P2;
float32 cost_s = cost + static_cast<float32>(std::min(std::min(l1, l2), std::min(l3, l4)));
cost_s /= 2;
cost_aggr_row[d] = cost_s;
min_cost = std::min(min_cost, cost_s);
}
// 重置上个像素的最小代价值和代价数组
mincost_last_path = min_cost;
memcpy(&cost_last_path[1], cost_aggr_row, disp_range * sizeof(float32));
// 下一个像素
cost_init_row += direction * disp_range;
cost_aggr_row += direction * disp_range;
img_row += direction * 3;
x += direction;
// 像素值重新赋值
color_last = color;
}
}
}
如果不了解聚合代码,可以看我此前博客:
编码实现经典SGM:(3)代价聚合
本篇我们重点看下P1和P2的计算方式:
我们首先在轮到每个像素时,计算了左视图上它与上一个像素的颜色距离(颜色差) d 1 d_1 d1:
const uint8 d1 = ColorDist(color, color_last);
然后在遍历像素每个视差时,计算右视图对应像素与其上一个像素的颜色距离 d 2 d_2 d2。
const sint32 xr = x - d;
if (xr > 0 && xr < width - 1) {
const ADColor color_r = ADColor(img_row_r[3 * xr], img_row_r[3 * xr + 1], img_row_r[3 * xr + 2]);
const ADColor color_last_r = ADColor(img_row_r[3 * (xr - direction)],
img_row_r[3 * (xr - direction) + 1],
img_row_r[3 * (xr - direction) + 2]);
d2 = ColorDist(color_r, color_last_r);
}
接下来根据 d 1 d_1 d1和 d 2 d_2 d2与阈值的比较情况,判定为四种情况中的某一种,计算P1和P2的值。
// 计算P1和P2
float32 P1(0.0f), P2(0.0f);
if (d1 < tso && d2 < tso) {
P1 = p1; P2 = p2;
}
else if (d1 < tso && d2 >= tso) {
P1 = p1 / 4; P2 = p2 / 4;
}
else if (d1 >= tso && d2 < tso) {
P1 = p1 / 4; P2 = p2 / 4;
}
else if (d1 >= tso && d2 >= tso) {
P1 = p1 / 10; P2 = p2 / 10;
}
其中,小写的p1、p2,以及tso都是输入的算法参数。
const auto p1 = so_p1_;
const auto p2 = so_p2_;
const auto tso = so_tso_;
竖直方向的代码我就不贴了,除了方向不同,和水平方向并无其他区别,照葫芦画瓢。
在公有的优化接口 Optimize 内,只需要依次调用四个方向的优化函数就行了。
void ScanlineOptimizer::Optimize()
{
if (width_ <= 0 || height_ <= 0 ||
img_left_ == nullptr || img_right_ == nullptr ||
cost_init_ == nullptr || cost_aggr_ == nullptr) {
return;
}
// 4方向扫描线优化
// 模块的首次输入是上一步代价聚合后的数据,也就是cost_aggr_
// 我们把四个方向的优化按次序进行,并利用cost_init_及cost_aggr_间次保存临时数据,这样不用开辟额外的内存来存储中间结果
// 模块的最终输出也是cost_aggr_
// left to right
CostAggregateLeftRight(cost_aggr_, cost_init_, true);
// right to left
CostAggregateLeftRight(cost_init_, cost_aggr_, false);
// up to down
CostAggregateUpDown(cost_aggr_, cost_init_, true);
// down to up
CostAggregateUpDown(cost_init_, cost_aggr_, false);
}
这里用了一个小技巧,即交替使用cost_aggr和cost_init,不用额外开辟四个方向的代价数组,只用两个代价数据即完成整个优化操作。
实验
我们做了三组实验,一组是只做左右水平方向的扫描线优化,一组是只做上下竖直方向的扫描线优化,剩下一组是做四个方向的优化。我们来看看效果。
|
|
|

|
|
看上去,只做水平或者竖直优化,视差图已有明显的改进,但单方向的优化会存在方向条纹效应,而4方向的优化结果则能够消除这一现象,达到更佳的状态。
最后,我们再贴一下文章开头的实验图:
|
|
|
|
|
好了,本篇到此结束,下一篇将为大家带来的是后处理部分。感谢观看!
下载AD-Census完整源码,点击进入: https://github.com/ethan-li-coding/AD-Census
欢迎同学们在Github项目里讨论,如果觉得博主代码质量不错,右上角给颗星!感谢!
博主简介:
Ethan Li 李迎松(知乎:李迎松)
武汉大学 摄影测量与遥感专业博士
主方向立体匹配、三维重建
2019年获测绘科技进步一等奖(省部级)
爱三维,爱分享,爱开源
GitHub: https://github.com/ethan-li-coding (欢迎follow和star)
个人微信:
欢迎交流!
关注博主不迷路,感谢!
博客主页:https://ethanli.blog.csdn.net
