编译 | CV君
报道 | 我爱计算机视觉(微信id:aicvml)
分享一篇今天新出的重要文章:Scaled-YOLOv4: Scaling Cross Stage Partial Network,作者出自YOLOv4的原班人马,其聚焦于针对YOLOv4的模型缩放(model scale)。
该文作者信息:

论文地址:https://arxiv.org/2011.08036
代码地址: https://github.com/WongKinYiu...
旗下重要的三个模型:
YOLOv4-CSP(面向普通GPU):
https://github.com/WongKinYiu...
YOLOv4-tiny(面向低端GPU):
https://github.com/WongKinYiu...
YOLOv4-large(面向高端GPU):
https://github.com/WongKinYiu...
在我爱计算机视觉公众号后台回复“YOLOv4”,即可收到包含论文和代码的打包下载。
实现效果
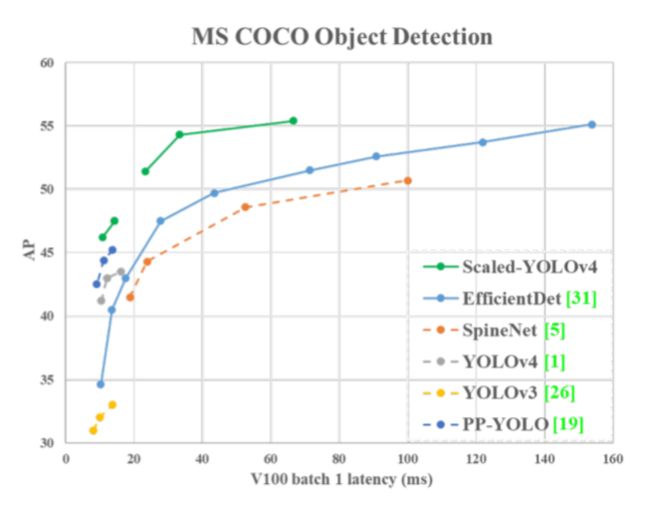
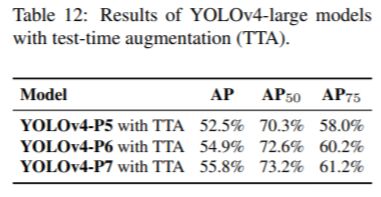
1)其开发的YOLOv4-large 在COCO数据集达到SOTA精度: 55.4% AP(73.3% AP50) 并以以15 fps 在 Tesla V100运行, 而如果加上测试阶段数据增强方法后,YOLOv4-large 达到 55.8% AP (73.2 AP50). 作者称这一精度是所有已公开文献的最高精度.
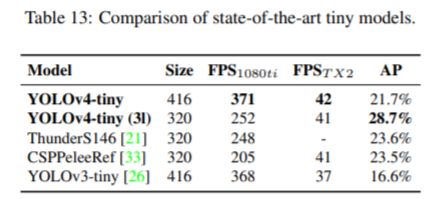
2)另外其 YOLOv4-tiny模型在COCO数据集达到 22.0% AP (42.0% AP50) , ∼443 FPS 在 RTX 2080Ti运行, 当使用 TensorRT做推理, batch size = 4 和 FP16推断时, YOLOv4-tiny 甚至可达到 1774 FPS!
何为模型缩放?
为什么要缩放?
首先我们要搞清楚这篇文章作者的本意,其本不是冲着提高检测精度而来的。其主要考虑的是在深度学习技术应用领域不断扩大的今天,面向实际工程部署,往往需要的不是一个模型而是一套模型。
部署在云端,也许你有高端大气上档次的V100 ,部署在个人电脑有大量的消费级GPU可选如2080TI(当然还是略贵~),部署在嵌入式平台可以选择TX2 、Jetson NANO等“弱机”。
模型缩放即希望一个算法衍生出多个模型,对计算和存储的需求不同(精度当然也不同),以满足部署在不同平台的需求。其实这当然不是什么新概念,EfficientNet、EfficientDet即是一个算法的一系列模型。
作为工业界宠爱的 YOLOv4, 需要模型缩放。
Scaled-YOLOv4
是怎么做模型缩放的?
正如之前跟大家分享过YOLOv4论文一样,作者们依然采用了极其工程化的方法设计 Scaled-YOLOv4 ,没有发明什么新思想、新路径,而是“博采众长”,“努力调优”。
以往模型缩放,如 EfficientDet 无非是首先选择网络基础模块,它往往又好又快,然后针对影响目标检测的重要参数如:网络宽度w、深度d、输入图像分辨率size等进行(满足一定条件下按照一定规律)调参。
虽然神经架构搜索也常被用于设计不同平台的一系列不同模型,但EfficientDet 已经证明上述方法其实是很有效。
作者针对不同的GPU设计不同模型。思路依然是寻找基础模块,然后调整网络宽度w、深度d、输入图像分辨率size。
作者认为之前的工作没有系统性分析各个网络因素的影响,而作者进行了系统分析。
这里CV君不再跟大家分享作者的分析细节,只上结论。
针对普通GPU,对应YOLOv4-CSP,作者选择了CSPNet (CVPR 2020 Workshop 论文)启发下的CSP-ized(CSP化的)模型作为基础结构。作为后来者,相比EfficientDet,设计 Scaled-YOLOv4 能选择的网络结构更多,当然是有优势的。
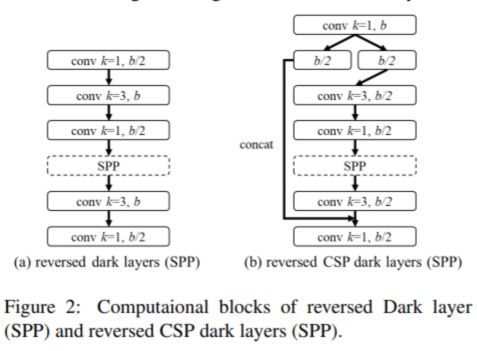
YOLOv4-CSP中的reversed CSP dark 结构
针对嵌入式等平台上的弱GPU,对应YOLOv4-tiny,除了考虑计算量,作者尤其提到要考虑内存访问速度、内存带宽、DRAM 速度的影响,作者选择了OSANet作为整体结构,并依然进行了CSP化,即CSPOSANet。CV君觉得这是搞工程化的人最值得参考的地方。
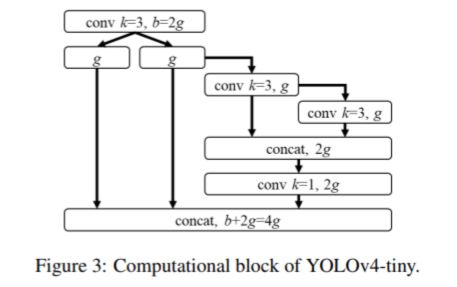
YOLOv4-tiny 计算模块
对于高端GPU,对应YOLOv4-Large,首要考虑的是追求高精度,所以作者在提高输入图像分辨率和增加stage上下功夫,因为这直接影响不同分辨率目标和算法感受野,输入分辨率高、算法感受野大能检测到更多目标。

YOLOv4-P5、P6、P7结构
算法效果
作者在COCO数据集上进行了测试,未使用预训练权重,从头开始训练。
尽管 Scaled-YOLOv4并不单纯追求精度高,但跟SOTA算法相比依然很能打。
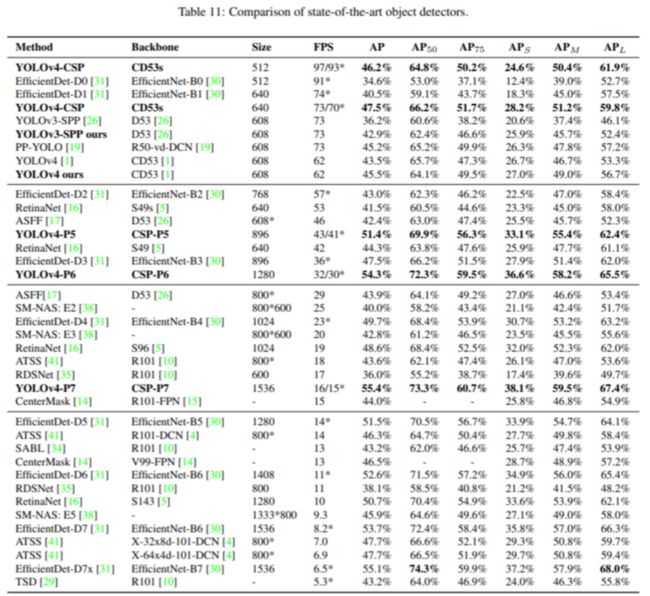
请注意,表中的YOLOv4 -CSP、P5、P6、P7依然都是实时算法,针对帧率15fps(v100 GPU上测试),当然YOLOv4-P7也取得了最高的精度,但相比相同输入分辨率的EfficientDet-D7x也并未出现碾压的架势,在Large目标上EfficientDet-D7x是最优秀的,YOLOv4-P7对小目标检测更好。
YOLOv4-Large 加上测试时图像增强(TTA,这时在工程应用时经常做的)后,精度获得了小幅提升:
YOLOv4-tiny同样很优秀,相比其他主打小模型计算量小的算法,取得了速度和精度的双优。
结论
尽管在算法设计上,该文并没有带来重要亮点,但从工程应用的角度讲, Scaled-YOLOv4无疑是极其优秀的选择!尤其是YOLOv4-tiny,其设计不仅考虑到计算量和参数量还考虑到内存访问,感谢作者团队的开源!
END