MotoSimEG-VRC软件:安川机器人喷涂应用虚拟仿真
目录
概述
喷涂机器人系统创建
喷枪模型导入与安装到机器人
喷涂工作站外围设备添加
喷涂仿真设置
机器人示教编程
喷涂机器人仿真运行
本文已经首发在个人微信公众号:工业机器人仿真与编程(微信号:IndRobSim),欢迎关注!
概述
喷涂是工业机器人又一大常见的工艺应用,仅次于焊接工艺应用,它们都属于在恶劣环境中从事高强度、高精度、高灵敏度的工作任务。
喷涂工艺对于机器人的性能要求极高,当然对于工艺的制定、程序的编写也是极其严格,这将直接影响喷涂的漆面效果。
大部分的机器人在真实喷涂工作之前都可以先通过虚拟仿真来验证制定的喷涂工艺,安川机器人也不例外,这个任务可以通过自身适配的虚拟仿真与离线编程软件MotoSimEG-VRC实现。
MotoSimEG-VRC软件进行喷涂工艺应用仿真时,不仅能够验证机器人的运动路径、干涉检测,还可以在喷枪喷嘴处生成油漆雾化模型以及在工件表面生成漆面效果,这些对于喷涂工艺规划验证有着非常大的帮助。
喷涂机器人系统创建
打开MotoSimEG-VRC软件,创建喷涂机器人工艺应用虚拟仿真项目,并生成虚拟仿真环境。
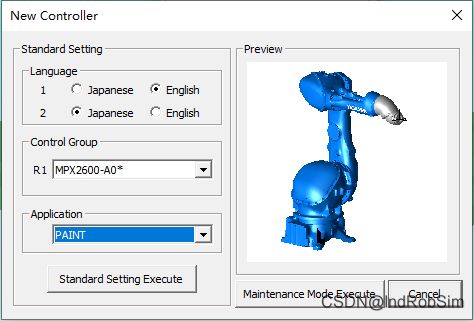
在虚拟仿真环境中添加虚拟机器人系统,机器人控制器选择“DX-200”,机器人在“MPX”系列中任选一个型号(此系列均为喷涂工艺应用机器人),工艺应用选择为“PAINT”,然后以“Standard Setting Execute”模式创建机器人系统。
喷枪模型导入与安装到机器人
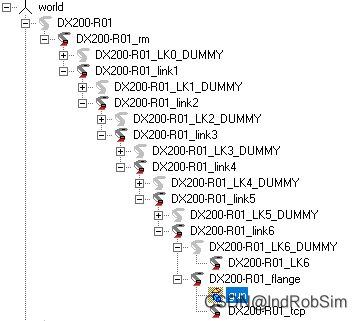
打开CadTree对话框,以世界坐标系world为父级参考对象导入机器人喷枪(雾化器)模型,然后使用“Move Parent”快捷命令将喷枪父级参考对象修改为机器人的“DX200-R01_flange”,与此同时喷枪模型被安装到机器人的六轴法兰上。
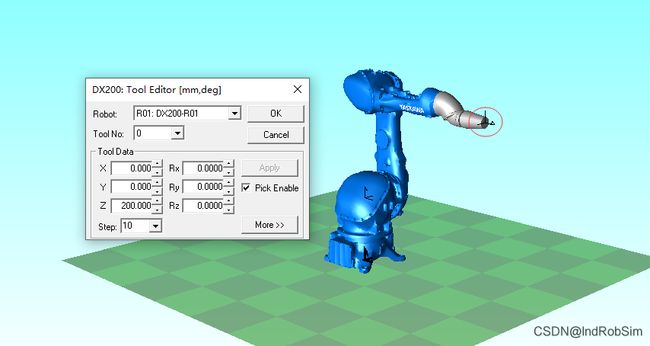
使用“Controller”菜单栏中的“Tool Data”命令标定机器人喷枪工具的TCP,可以在Tool Editor对话框中先激活“Pick Enable”功能选项,然后在喷枪喷嘴位置处直接拾取TCP原点位置。
喷涂工作站外围设备添加
导入喷涂工作台模型,将其放置到合适的位置处,然后再导入喷涂工件模型,并将其摆放到喷涂工作台的台面上。当然,喷涂工作台以及喷涂工件模型也可以使用软件自带的模型创建功能直接创建。

喷涂仿真设置
喷涂工艺应用仿真中关键的步骤就是喷涂仿真设置,包括喷涂模型设置与喷涂设置。其中,喷涂模型是在喷枪的喷嘴处生成一个模拟真实喷雾体的模型,通过改变喷涂模型参数可以改变喷涂模型形状,并且仿真出的喷涂效果也会随之改变。喷涂设置中可以设置喷涂工件对象以及喷涂颜色效果等。在执行仿真运行过程中,通过SPYON、SPYOF指令能够控制喷涂模型自动显示和隐藏,并在SPYON与SPYOF指令之间的运动路径上显示喷涂颜色效果。
软件“Simulation”菜单栏中点击“Paint Setting”![]() 命令按钮,弹出Paint Panel对话框,默认激活Spray model setting属性标签,即喷涂模型设置。
命令按钮,弹出Paint Panel对话框,默认激活Spray model setting属性标签,即喷涂模型设置。
可以根据实际的喷涂工艺标准设置喷涂模型参数,以控制油漆喷出后的雾化状态,从而达到要求的涂装效果。
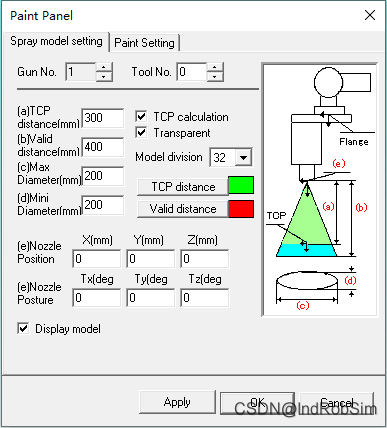
Spray model setting属性标签中每一条功能选项的详细描述如下所示。
Gun No.:设置喷枪编号,范围1~3。
Tool No.:指定用于设置喷枪编号的工具编号(机器人工具编号)。
(a)TCP distance(mm):TCP距离,指喷涂物化模型上的TCP与喷枪喷嘴之间的垂直距离。
(b)Valid distance(mm):有效距离,指油漆从喷枪喷嘴喷出的最大长度。
(c)Max Diameter(mm):最大直径,指油漆雾化后的漆面最大宽度。
(d)Mini Diameter(mm):最小直径,指油漆雾化后的漆面最小宽度。
(e)Nozzle Position:喷嘴位置坐标,指喷涂雾化模型与喷枪工具TCP之间的相对位置坐标。
(e)Nozzle Posture:喷嘴姿态坐标,指喷涂雾化模型与喷枪工具TCP之间的相对姿态坐标。
TCP calculation:激活后,将根据输入的数据自动计算工具TCP坐标。
Transparent:激活后,喷涂雾化模型将以半透明颜色生成并显示。
Model division:指定生成的喷涂雾化模型的面数。
TCP distance:指定喷枪喷嘴到喷涂雾化模型TCP之间的模型颜色。
Valid distance:指定喷涂雾化模型TCP到喷涂有效范围边界之间的模型颜色。
Display model:激活后,将显示生成的喷涂雾化模型。
以上参数中,标有a、b、c、d、e字样的功能选项,在对话框右侧的图片中有相应的图例说明,可以作为辅助参考。
点击“Paint Setting”属性标签,切换到喷涂设置界面。激活“Paint Enable”功能选项,然后在Paint Color功能区下设置喷涂效果颜色,最后激活“Pick”功能选项后在软件工作区选取喷涂工件对象,并在工件模型列表中将其选中。
这里要注意的是,当一个控制器中存在多台机器人时,喷涂仿真将不被支持;喷涂仿真无法直接输出3DPDF文件或AVI文件;用多把喷枪仿真同一外涂层的情况同样不被支持;使用“Masking”功能时,喷涂仿真运行的速度将会变慢。
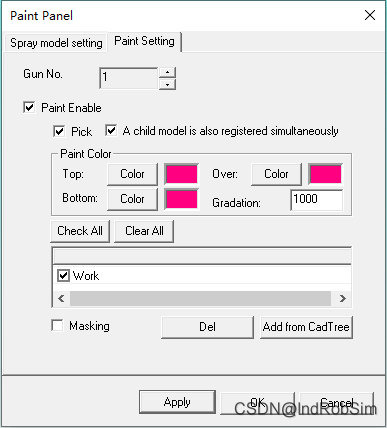
Paint Setting属性标签中每一条功能选项的详细描述如下所示。
Gun No.:设置喷枪编号,范围1~3。
Paint Enable:激活后,仿真运行时工件上将显示设定的油漆颜色。
Pick:激活后,在软件工作区可以直接点选工件模型,选中的模型将显示在下方的工件模型列表框里。
A child model is also registered simultaneously:激活后,添加的工件模型的子级模型也会同时注册生效。
Paint Color:设置工件喷涂颜色,包括喷涂正常时颜色(Top)、喷涂开始时颜色(Bottom)、喷涂结束时颜色(Over)以及喷涂开始与结束之间的颜色渐变度(Gradation)。
Model List:工件模型列表,显示已选择的工件模型,并显示模型是否已被选中。
Check All:点击后,工件模型列表中所有的模型都被选中。
Clear All:点击后,工件模型列表中所有选中的模型将取消选中。
Masking:激活后,当选中的工件模型与喷枪之间存在障碍物时,油漆颜色将不会在工件模型上显示。
Del:点击后,从工件模型列表中删除选中的工件模型。
Add from CadTree:点击后,将从CadTree中添加已点选的模型到工件模型列表中。
机器人示教编程
在虚拟示教器中编写机器人喷涂运行轨迹程序,并在喷涂工艺路径程序段前后分别添加喷涂开始指令SPYON与喷涂结束指令SPYOF,如下图所示。

喷涂机器人仿真运行
对喷涂机器人进行仿真运行,仿真运行效果如下方动态图所示。可以看到机器人按照示教的轨迹点位运动,并对工件进行喷涂加工,同时机器人喷涂过的工件表面立即显示出设定的油漆颜色。
The End
上一篇:MotoSimEG-VRC软件:多机器人信号交互与PLC功能