相机标定与图像校准
相机标定流程
-
运行环境
该相机标定流程分为python版本与C++版本(需要与opencv进行环境配置); -
标定对象
标定对象为存在畸变的普通免驱相机或其他有畸变相机; -
标定物品
该标定方法为张正友相机标定法,需要使用“棋盘”标定板(该标定板棋盘样式为12*9,该格式与程序参数有关);

-
流程简述
首先需要使用有畸变的相机拍摄完整的棋盘照片,可用照片数量建议15-25张;拍摄时建议棋盘出现在相机的不同位置,覆盖各个方位和一定的距离段。然后使用已拍摄的照片计算出相机的内外参数,要注意相机的内参、外参、参数格式等。最后使用获得参数进行图像全局矫正或者图像稀疏点的矫正。 -
python版本
为了使用方便,有照片截取程序与参数求解流程,以及矫正函数使用流程。
5.1照片截取程序
#照片截取程序
import numpy as np
import cv2
import matplotlib.pyplot as plt
cap = cv2.VideoCapture(0)
#cap.set(cv2.CAP_PROP_FRAME_WIDTH,300)
#cap.set(cv2.CAP_PROP_FRAME_HEIGHT,200)
if not cap.isOpened():
raise ValueError("Video is not openning")
cv2.namedWindow('chess',cv2.WINDOW_NORMAL)
count = 0
while(True):
ret, frame = cap.read()
cv2.imshow('chess',frame)
if cv2.waitKey(1) & 0xFF == ord('s'):#当键盘键入"S"会进行一次拍照
cv2.imwrite('/home/pi/Desktop/biaoding'+str(count)+'.jpg',frame)#home/pi/Desktop/biaoding 为照片写入路径
count = count + 1
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
5.2参数求解程序
#参数求解程序
import numpy as np
import cv2 as cv
import glob
# termination criteria
criteria = (cv.TERM_CRITERIA_EPS + cv.TERM_CRITERIA_MAX_ITER, 20, 0.001)
# prepare object points, like (0,0,0), (1,0,0), (2,0,0) ....,(6,5,0)
objp = np.zeros((11*8,3), np.float32)
objp[:,:2] = np.mgrid[0:11,0:8].T.reshape(-1,2)
# Arrays to store object points and image points from all the images.
objpoints = [] # 3d point in real world space
imgpoints = [] # 2d points in image plane.
images = glob.glob('/home/pi/Desktop/biaoding/*.jpg')
for fname in images:
img = cv.imread(fname)
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# Find the chess board corners
ret, corners = cv.findChessboardCorners(gray, (11,8), None)
print('0')
# If found, add object points, image points (after refining them)
if ret == True:
print('1')#该输出为方便了解是否在照片中找到棋盘各点,表示该照片是否有效
objpoints.append(objp)
corners2 = cv.cornerSubPix(gray,corners, (11,11), (-1,-1), criteria)
imgpoints.append(corners)
# Draw and display the corners
cv.drawChessboardCorners(img, (11,8), corners2, ret)
cv.imshow('img', img)
cv.waitKey(500)
cv.destroyAllWindows()
print('参数正在求解')
ret, mtx, dist, rvecs, tvecs = cv.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)
print(mtx)
print(dist)
np.savetxt('/home/pi/Desktop/biaoding/',mtx)#该路径为参数写入路径
np.savetxt('/home/pi/Desktop/biaoding/',dist)
5.3图像矫正
使用 cv2.undistort() 这是最简单的方法。只需使用这个函数和上边得到
的 ROI 对结果进行裁剪。
#undistort方式矫正
img = cv2.imread('left12.jpg')
h, w = img.shape[:2]
newcameramtx, roi=cv2.getOptimalNewCameraMatrix(mtx,dist,(w,h),1,(w,h))
# undistort
dst = cv2.undistort(img, mtx, dist, None, newcameramtx)
# crop the image
x,y,w,h = roi
dst = dst[y:y+h, x:x+w]
cv2.imwrite('calibresult.png',dst)
使用 remapping 我们要找到从畸变图像到非畸变图像的映射方程,再使用重映射方程
# undistort
mapx,mapy = cv2.initUndistortRectifyMap(mtx,dist,None,newcameramtx,(w,h),5)
dst = cv2.remap(img,mapx,mapy,cv2.INTER_LINEAR)
# crop the image
x,y,w,h = roi
dst = dst[y:y+h, x:x+w]
cv2.imwrite('calibresult.png',dst)
- C++程序版本
6.1 C++程序集图像采集、参数输出、图像矫正于一体
#include在程序运行之前需要对argc进行命令参数传值,传递参数视个人具体情况而定
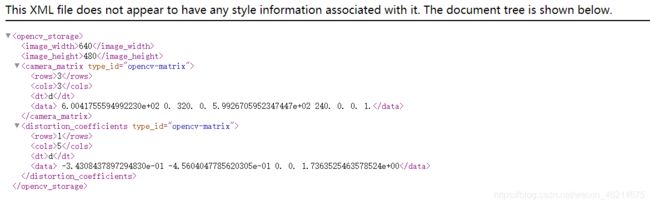
6.2该文件为参数生成文件,包含所需参数
- 图像稀疏点矫正 注意事项
使用cv::undistortPoints()进行稀疏矫正,不会矫正整个图像,而是从图像中收集一组点,使用该函数来进行矫正可以获得其正确位置,也可以减少计算量

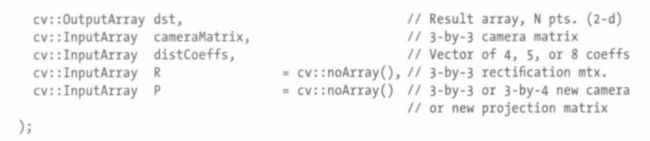
对于单目相机的图像点矫正,使用函数需要输入六个参数
cv::undistortPoints(inputDistortedPoints, outputUndistortedPoints, cameraMatrix, distCoeffs)
使用的输入会使得矫正后的数据过小,影响使用,正确使用方法为
cv::undistortPoints(inputDistortedPoints, outputUndistortedPoints, cameraMatrix, distCoeffs, cv::noArray(), cameraMatrix);
重复输入cameraMatrix该矩阵可以解决问题
此外还应该注意对于图像点矫正的流程
如果需要对图像点进行运算,应当在图像矫正后进行;在图像矫正之前不应该进行改变图像位置点的运算,这样会导致图像点矫正后出现混乱,要切记