安装voxblox构建稠密地图踩坑:
安装voxblox:
参照链接:https://voxblox.readthedocs.io/en/latest/pages/Installation.html
依赖包github下载会很慢,博主已经下载放在了https://download.csdn.net/download/neptune4751/13144410
sudo apt-get install python-wstool python-catkin-tools ros-kinetic-cmake-modules protobuf-compiler autoconf报错:
gzip: stdout: No space left on device
E: mkinitramfs failure find 141 cpio 141 gzip 1
update-initramfs: failed for /boot/initrd.img-4.13.0-36-generic with 1.解决办法:
df -h查看哪个空间内有空余:

可以看到boot空间几乎已经满了,但是/ 空间还有很多,所以就将这个空间挂载到/boot中,问题可以解决
sudo mount /dev/sda8 /boot/
注意:
git clone https://github.com/ethz-asl/voxblox.git最近从github下载会速度会非常慢,博主将下载的依赖包上传到了CSDN的资源https://download.csdn.net/download/neptune4751/13144410可以提供下载多有依赖包,下载放入src中,就可以直接进行
cd ~/voblox_ws/src
catkin build voxblox_ros 记录错误:
RLException: [mav_hovering_example.launch] is neither a launch file in package [rotors_gazebo] nor is [rotors_gazebo] a launch file name
The traceback for the exception was written to the log file报错原因:setup.bash 文件没有说明包的来源,解决办法为:
source voxblox_ws/devel/setup.bashvoxblox和 rviz连接起来 显示结果:
rosmake voxblox_rviz插件:
source voxblox_ws/devel/setup.bash
rosmake voxblox_rviz_plugin在cow_and_lady_dataset.launch中修改bag_file:将路径修改为绝对路径:
1、打开一个终端
roscore
2、配置rviz
source voxblox_ws/devel/setup.bash
rosrun rviz rviz
打开是这样的,点击左下角add

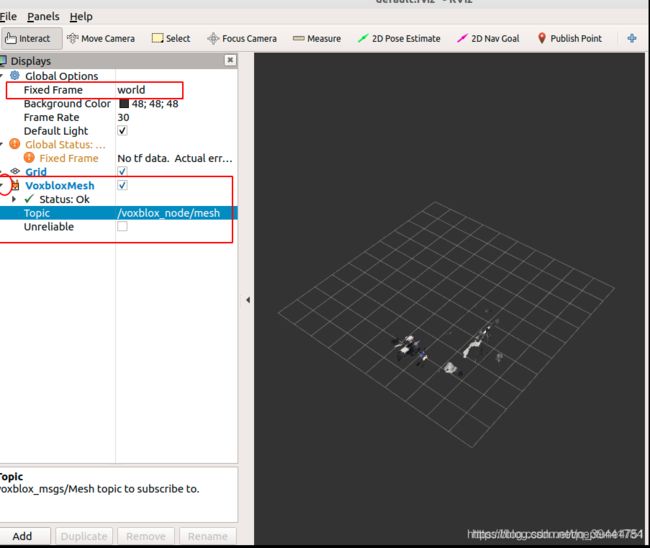
rosmake voxblox_rviz_plugin完成以后,配置完成如下图,会出现有voxbloxmesh"小狐狸"的头像,直接选上就行。
再按下图配置,其中Fixed Frame 默认为"map"而且下拉菜单没有其它选项可选,需要手动写入修改为world,Voxblox Mesh将Topic下拉选择/voxblox_node/mesh.
roslaunchsource voxblox_ws/devel/setup.bash
roslaunch voxblox_ros cow_and_lady_dataset.launch运行结果如下图:
参考:
https://voxblox.readthedocs.io/en/latest/pages/Installation.html
https://blog.csdn.net/qq_39441784/article/details/108612146
https://blog.csdn.net/crp997576280/article/details/74605766
https://blog.csdn.net/qq_41953012/article/details/106876686