数据结构与算法面试要点简明教程(七)—— 图
参考:https://blog.csdn.net/jiaoyangwm/article/details/80808235
https://blog.csdn.net/a2392008643/article/details/81781766
https://mp.weixin.qq.com/s/vn3KiV-ez79FmbZ36SX9lg
本文仅是将他人博客经个人理解转化为简明的知识点,供各位博友快速理解记忆,并非纯原创博客,如需了解详细知识点,请查看参考的各个原创博客。
目录
第七章 图
7.1 图的定义
7.2 图的存储结构
7.3 图的遍历
7.4 最短路径算法
7.5 最小生成树
7.6 拓扑排序
7.7 相关面试题
第七章 图
- 图是由顶点的有穷非空集合和顶点之间边的集合组成,通常表示为:G(V,E),其中,G表示一个图,V是图G中顶点的集合,E是图G中边的集合。
7.1 图的定义
1、无向图
顶点之间没有方向,称这条边为无向边,全部由无向边构成图称为无向图(Undirected Graph)。
 无向图
无向图
无向图中,如果任意两个顶点之间都存在边,则称该图为无向完全图,含有n个顶点的无向完全图有 条边。
条边。
2、有向图
顶点之间有方向,称这条边为有向边,全部由有向边构成图称为无向图(Directed Graph)。
 有向图
有向图
有向图中,如果任意两个顶点间都存在方向互为相反的两条弧,则称为有向完全图。含有n个顶点的有向完全图有n(n−1)条边。
3、连通图
无向图中,如果两个顶点之间有路径,说明两顶点是连通的,如果对于图中任意两个顶点都是连通的,则称该无向图是连通图。
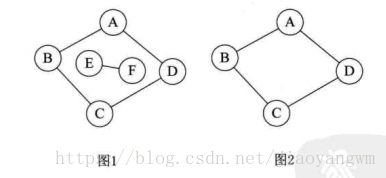 图1非连通图,图2为连通图
图1非连通图,图2为连通图
4、连通分量
无向图中的极大连通子图称为连通分量。注意连通分量的概念,它强调:
- 要是连通的子图
- 连通子图含有极大顶点数
- 具有极大顶点数的连通子徒包含依附于顶点的所有边
如图1中,其连通分量包括图2和图3

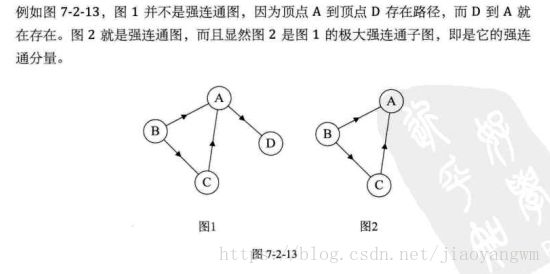
有向图中,如果对于每一对vi,vj(vi不等于vj),从vi到vj都存在路径,称其为强连通图。
5、总结
7.2 图的存储结构
图的结构比较复杂,任意两个顶点之间都可能存在联系,所以不可能用简单的顺序存储结构来表示,所以用下面的五种方法来存储图。
7.2.1 邻接矩阵
邻接矩阵用两个数组来表示图,一个一维数组存储图中顶点的信息,一个二维数组(称为邻接矩阵)存储图中的边或弧的信息。
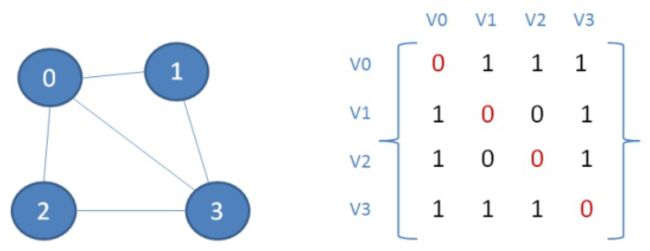
如上图所示,顶点x和顶点y之间有边关联,那么矩阵中的元素A[x][y]与A[y][x]的值就是1,否则为0。像这样表达图中顶点关联关系的矩阵,就叫做邻接矩阵。
注意:
- 由于任何一个顶点与它自身是没有连接的,因此矩阵对角线,其上的元素值必然是0;
- 无向图对应的矩阵是一个对称矩阵。
邻接矩阵的优点就是简单直观,可以快速查到一个顶点和另一顶点之间的关联关系;缺点就是占用了太多空间。
7.2.2 邻接表和逆邻接表
为了解决邻接矩阵占用空间的问题,人们想到了另一种图的表示方法:邻接表。
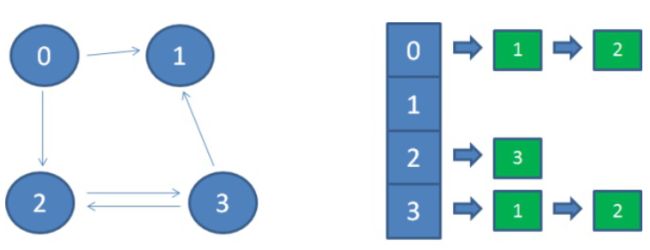
在邻接表中,图的每一个顶点都是一个链表的头结点,其后连接着该顶点能够直接达到的相邻顶点。
要想查出顶点x能够到达的所有相邻顶点,从顶点x向后的所有链表结点,就是顶点x能到达的相邻顶点;但是,如果要查找哪些点能到达顶点x,就只能去遍历每个顶点所在链表,看其链表中是否包含顶点x,这种逆向查找的方式略显麻烦,因此提出了逆邻接表的结构:
逆邻接表每一个顶点作为链表的头节点,后继节点所存储的是能够直接达到该顶点的相邻顶点。
因此,我们可以根据实际需求,选择使用邻接表还是逆邻接表。
7.2.3 十字链表
十字链表把邻接表和逆邻接表结合了起来,优化之后的十字链表,是下面这个样子:
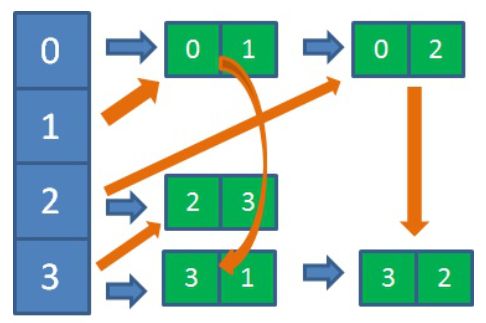
图中蓝色为顶点,绿色为边,每一条带有蓝色箭头的链表,存储着从顶点出发的边;每一条带有橙色箭头的链表,存储着进入顶点的边。
7.2.4 邻接多重表
略
7.2.5 边集数组
略
7.3 图的遍历
从图中某一顶点出发访问图中其余顶点,且使每一个顶点仅被访问一次,该过程叫图的遍历。
7.3.1 深度优先遍历(Depth First Search, DFS)
深度优先遍历类似于树的前序遍历,其遍历整个图的方法是:
- 访问顶点v;
- 依次从v的未被访问的邻接点出发,对图进行深度优先遍历,直到图中所有和v有路径相通的顶点都被访问到;
- 若此时图中尚有顶点未被访问,则从一个未被访问的顶点出发,重新进行深度优先遍历,直到图中所有顶点均被访问过为止。
1、DFS的基本结构
在程序实现 DFS 时需要考虑以下问题:
- 栈:用栈来保存当前节点信息,保证当遍历的新节点返回时能够继续遍历当前节点。
- 标记:需要对已经遍历过的节点进行标记。
//非递归的DFS用栈来实现,递归式的DFS基本结构如下
void dfs(int[][] grid, int r, int c) {
// 判断 base case,不满足条件立即返回
if (!inArea(grid, r, c)) return;
// 判断是否遍历过了
if (grid[r][c] != 1) return;
// 将格子标记为「已遍历过」
grid[r][c] = 1;
// 访问邻接点
dfs(grid, r - 1, c);
dfs(grid, r + 1, c);
dfs(grid, r, c - 1);
dfs(grid, r, c + 1);
}2、Backtracking
Backtracking(回溯)属于 DFS。
- 普通 DFS 主要用在 可达性问题 ,这种问题只需要执行到特点的位置然后返回即可。
- 而 Backtracking 主要用于求解 排列组合 问题。
因为 Backtracking 不是立即返回,而要继续求解,因此在程序实现时,需要注意对元素的标记问题:
- 在访问一个新元素进入新的递归调用时,需要将新元素标记为已经访问,这样才能在继续递归调用时不用重复访问该元素;
- 但是在递归返回时,需要将元素标记为未访问,因为只需要保证在一个递归链中不同时访问一个元素,可以访问已经访问过但是不在当前递归链中的元素。
string cur;
void backTracking(string digits){
if(digits.size() == 0){
res.push_back(cur);
}else{
char num = digits[0];
string letter = mp[num];
for(int i = 0; i < letter.size(); i++){
cur.push_back(letter[i]);
backTracking(digits.substr(1));
cur.pop_back();
}
}
return;
}7.3.2 广度优先遍历(Breadth First Search, BFS)
广度优先遍历类似于树的层序遍历,先将某一结点入队,出队时将所有与其相连的结点入队,以此类推。
在程序实现 BFS 时需要考虑以下问题:
- 队列:用来存储每一轮遍历得到的节点;
- 标记:对于遍历过的节点,应该将它标记,防止重复遍历。
class Solution {
public:
int shortestPathBinaryMatrix(vector>& grid) {
int ans = 0;
queue myQ; // BFS一般通过队列方式解决
int M = grid.size();
int N = grid[0].size();
// 先判断边界条件,很明显,这两种情况下都是不能到达终点的。
if (grid[0][0] == 1 || grid[M - 1][N - 1] == 1) return -1;
// 备忘录,记录已经走过的结点
vector> mem(M, vector(N, 0));
//塞入初始结点
myQ.push({0, 0});
mem[0][0] = 1;
// 以下是标准BFS的写法
while (!myQ.empty()) {
int size = myQ.size();
for (int i = 0; i < size; i++) {
Node currentNode = myQ.front();
int x = currentNode.x;
int y = currentNode.y;
// 判断是否满足退出的条件
if (x == (N - 1) && y == (M - 1)) return (ans + 1);
// 下一个节点所有可能情况
vector nextNodes = {
{x + 1, y}, {x - 1, y}, {x + 1, y - 1}, {x + 1, y + 1},
{x, y + 1}, {x, y - 1}, {x - 1, y - 1}, {x - 1, y + 1}};
for (auto& n : nextNodes) {
// 过滤条件1: 边界检查
if (n.x < 0 || n.x >= N || n.y < 0 || n.y >= M) continue;
// 过滤条件2:备忘录检查
if (mem[n.y][n.x] == 1) continue;
// 过滤条件3:题目中的要求
if (grid[n.y][n.x] == 1) continue;
// 通过过滤筛选,加入队列!
mem[n.y][n.x] = 1;
myQ.push(n);
}
myQ.pop();
}
ans++;
}
return -1;
}
}; 7.3.3 总结
深度优先搜索用栈(stack)来实现,整个过程可以想象成一个倒立的树形:
- 把根节点压入栈中。
- 每次从栈中弹出一个元素,搜索所有在它下一级的元素,把这些元素压入栈中。并把这个元素记为它下一级元素的前驱。
- 找到所要找的元素时结束程序,如果遍历整个树还没有找到,结束程序。
广度优先搜索使用队列(queue)来实现,整个过程也可以看做一个倒立的树形:
- 把根节点放到队列的末尾。
- 每次从队列的头部取出一个元素,查看这个元素所有的下一级元素,把它们放到队列的末尾。并把这个元素记为它下一级元素的前驱。
- 找到所要找的元素时结束程序,如果遍历整个树还没有找到,结束程序。
几句话总结:
- 深度和广度优先遍历在时间复杂度上是一致的,若有N个结点、E条边,则遍历这个图的时间复杂度:邻接矩阵
 、邻接表
、邻接表 ;
; - 在空间复杂度上,
DFS是有优势的,DFS不需要保存搜索过程中的状态,而BFS在搜索过程中需要保存搜索过的状态,而且一般情况需要一个队列来记录。 - 深度优先更适合以找到目标为主的情况(一般就是搜索全部解),广度优先更适合在不断扩大遍历访问时找到最优解的情况(一般就是求最短路径、最少次数等最优解)。
7.4 最短路径算法
最短路径是两顶点之间经过的边上权值之和最少的路径,并且成第一个顶点是源点,最后一个顶点是终点。
7.4.1 无权图的单源最短路径算法
在BFS的基础上做改动,首先定义dist[W]为S到W最短距离,path[W]为S到W路上经过的某顶点,初始化dist[S]=0,dist[W]=-1。
算法流程:
- 源点S入队;
- 进入while循环,若队列不为空,则从队列中弹出一个结点V;
- 遍历结点V的邻接点W,若邻接点W没被访问过(dist[W]=-1),则dist[W] = dist[V]+1,且path[W]=V;
- 再将该邻接点压入队列,不断循环直至遍历完整个图。
7.4.2 Dijkstra算法
迪杰斯特拉算法是一种有权图的单源最短路径算法。
主要思想:设有两个顶点集合S和T,S中存放已找到最短路径的顶点,T存放剩余顶点。初始时S只包含源点
,然后不断从T中选取到
并入集合S。集合S每并入一个新顶点,都要修改源点
为了实现这一算法,应初始化三个数组:
-
![dist[v_{i}]](http://img.e-com-net.com/image/info8/701afa395f2d4811a940fe76d7056959.gif) 表示 到 的最短路径长度(初态为与源点相邻的设为权值,其余为无穷)
表示 到 的最短路径长度(初态为与源点相邻的设为权值,其余为无穷) -
![path[v_{i}]](http://img.e-com-net.com/image/info8/b380e4ff0af044eaa8db6b137b5101a2.gif) 表示 到 的最短路径中,的前一个顶点(初态为与源点相邻设为0,否则为-1)
表示 到 的最短路径中,的前一个顶点(初态为与源点相邻设为0,否则为-1) -
![collected[v_{i}]](http://img.e-com-net.com/image/info8/872063566fc5418891ac7812201fda76.gif) 表示 是否并入集合S了,并入为1,未并入为0
表示 是否并入集合S了,并入为1,未并入为0
则迪杰斯特拉算法的伪代码描述如下:
void Dijkstra( Vertex s ){
while(1){
V=未收录的顶点中dist最小者;
if(找不到这样的V) break;
collected[V] = true;
for(V的每个邻接点W){
if(collected[W] = false){
if(dist[V]+E < dist[W]){
dist[W] = dist[V]+E;
path[W] = V;
}
}
}
}
}
注意:该算法不可解决负边的问题,时间复杂度为![]() 或者
或者![]() ,路径的打印用堆栈。
,路径的打印用堆栈。
7.4.3 Floyd算法
弗洛伊德算法是一种多源最短路径算法。
主要思想:设置两个矩阵A和Path,初始时将邻接矩阵直赋值给A,Path中元素全赋为-1。以顶点k为中间顶点,
,对图中所有顶点对 {i, j} 进行检测,若
则将
的值修改为
的值,
改为k,否则什么都不做。
则弗洛伊德算法的伪代码如下:
void Floyd(){
//矩阵A和Path的初始化
for(i=0;iA[i][k]+A[k][j]){
A[i][j]=A[i][k]+A[k][j];
Path[i][j]=k;
}
}
}
}
}
注意:路径的打印用递归。
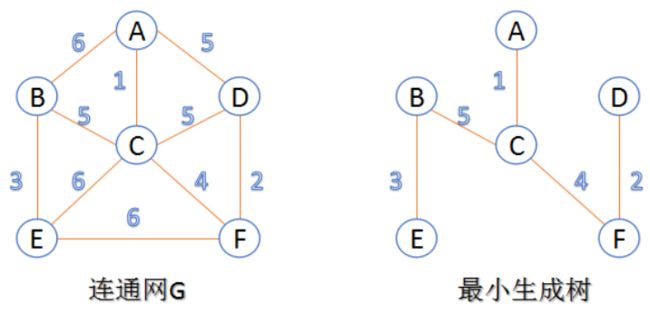
7.5 最小生成树
生成树:一个连通图的生成树是指一个连通子图,它含有图中全部n个顶点,但只有足以构成一棵树的n-1条边。一棵有n个顶点的生成树有且仅有n-1条边,如果生成树中再添加一条边,则必定成环。
最小生成树:在连通网的所有生成树中,所有边的代价和最小的生成树,称为最小生成树。
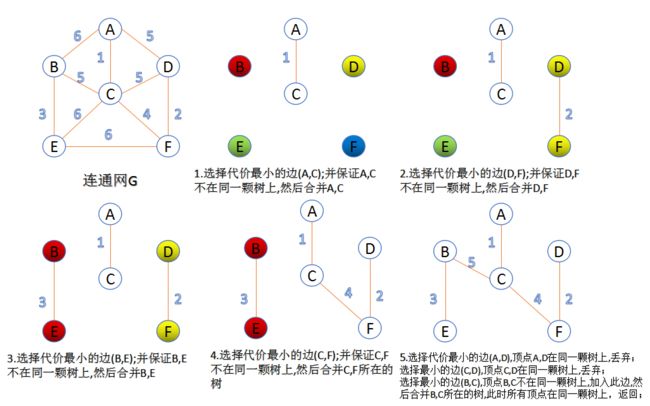
7.5.1 Kruskal算法
此算法可以称为“加边法”,初始最小生成树边数为0,每迭代一次就选择一条满足条件的最小代价边,加入到最小生成树的边集合里。
- 把图中的所有边按代价从小到大排序;
- 把图中的n个顶点看成独立的n棵树组成的森林;
- 按权值从小到大选择边,所选的边连接的两个顶点
应属于两颗不同的树,则这条边成为最小生成树的一条边,并将这两棵树合并成为一棵树;
- 重复上述步骤,直到所有顶点都在一颗树内或者有n-1条边为止。
7.5.2 Prim算法
此算法可以称为“加点法”,每次迭代选择相对于树来说代价最小的边对应的点,加入到最小生成树中。算法从某一个顶点s开始,逐渐扩大覆盖整个连通网的所有顶点。
- 图的所有顶点集合为V,初始时令集合u={s},v=V−u;
- 在两个集合 u,v 能够组成的边中,选择一条代价最小的边
,加入到最小生成树中,并把
- 重复上述步骤,直到最小生成树有n-1条边或者n个顶点为止。
由于不断向集合u中加点,所以最小代价边必须同步更新;需要建立一个辅助数组closedge,用来维护集合v中每个顶点与集合u中最小代价边信息:
struct {
char vertexData //表示v中顶点
unsigned int lowestCost //该顶点到u的最小代价
} closEdge[vexCounts]
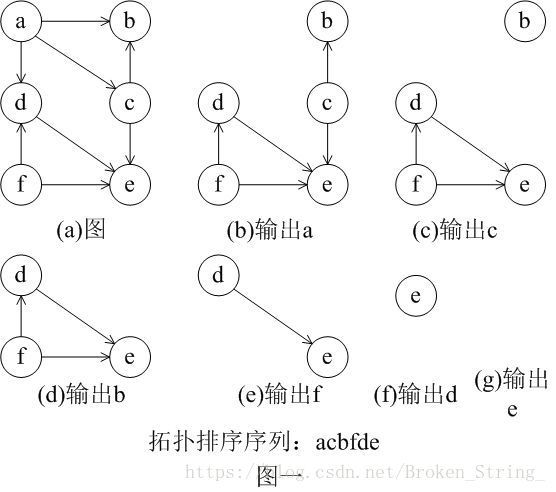
7.6 拓扑排序
拓扑序列:如果图中从V到W有一条有向路径,则V一定排在W之前,满足此条件的顶点序列成为一个拓扑序列。
获得一个拓扑序列的过程就称为拓扑排序。拓扑排序广泛应用在AOV(Activity on Vertex)网络和DAG(Directed Acyclic Graph)有向无环图中。个人理解:当要完成一件事时,拓扑排序就是给出完成事件的顺序,比如要先完成任务一,才能去完成任务二,以此类推。
简单来说,拓扑排序过程其实就是每次从图中找到入度为0的顶点打印出来,伪代码如下:
void TopoSort(){
for(图中每个顶点V){
if(Indegree(V) == 0) Enqueue(V,Q);
}
while(!isEmpty(Q)){
V=Dequeue(Q);
输出V;
count++;
for(V的每个邻接点W){
if(--Indegree(W)==0) Enqueue(W,Q);
}
}
if(count != |V|) Error("图中有回路");
}
下面给出一个例子:
7.7 相关面试题
Q:
A: