Ubuntu18.04安装ROS+gazebo9
1.安装ros
Ubuntu18.04选择ROS Melodic
教程网址:http://wiki.ros.org/cn/melodic/Installation/Ubuntu
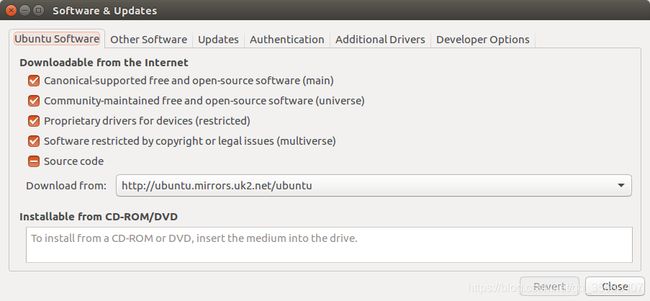
1.1配置 Ubuntu 软件仓库
配置Ubuntu 软件仓库(repositories) 以允许 "restricted"、"universe" 和 "multiverse"这三种安装模式。
1.2添加 sources.list
设置你的电脑以从 packages.ros.org 接收软件.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'这里选择国内源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'1.3添加公钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -1.4安装
首先,确保你的 Debian 包索引是最新的:
sudo apt update安装桌面完整版(包含gazebo):
sudo apt install ros-melodic-desktop-full下列命令可以查找可用软件包:
apt search ros-melodic1.5初始化rosdep
在你使用 ROS 之前,需要初始化 rosdep。rosdep 让你能够轻松地安装被想要编译的源代码,或被某些 ROS 核心组件需要的系统依赖。
(1) 安装完ROS后,初始化指令sudo rosdep init失败,提示: sudo: rosdep:command not found
按照以下方式解决:
sudo apt install rospack-tools
之后运行 sudo rosdep init 即可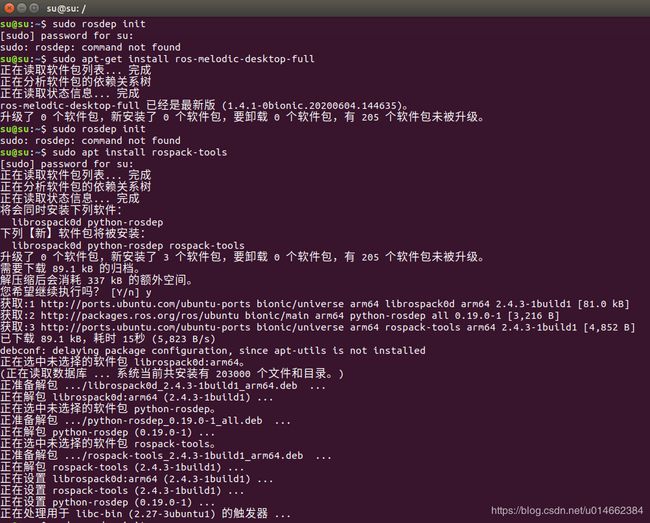
(2)安装完ROS后,初始sudo rosdep init,显示:
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
如下图:
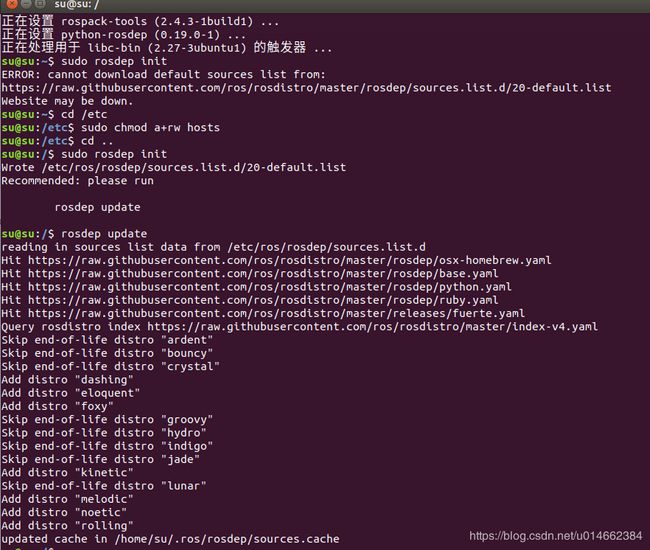
解决办法:
首先 /etc 目录下打开终端,输入以下命令以更改hosts文件权限
cd /etc
sudo chmod a+rw hosts
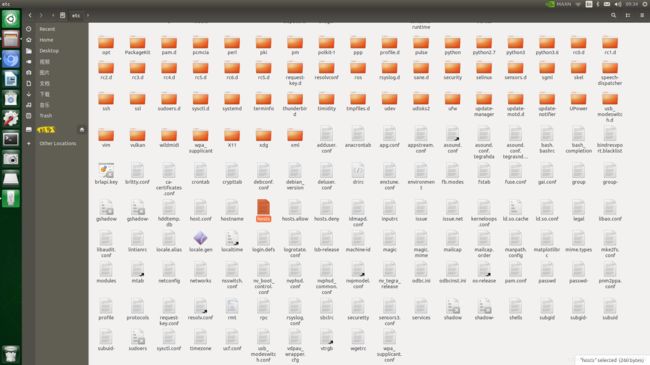
接着打开hosts文件,在文件末尾添加以下内容,并保存后退出
151.101.84.133 raw.githubusercontent.com
1.6设置环境
将 ROS 环境变量自动添加到新 bash 会话会很方便:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc1.7构建工厂依赖
使用下列命令:
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential1.8试运行
输入下列命令看是否正常安装
roscore2.安装gazebo
官方教程:http://gazebosim.org/tutorials?cat=install&tut=install_ubuntu&ver=8.0
2.1简易安装
curl -sSL http://get.gazebosim.org | sh2.2试运行
gazebo3.安装gazebo_ros_pkgs
官方教程:http://gazebosim.org/tutorials?tut=ros_installing&cat=connect_ros
3.1查看版本
运行
which gzserver
which gzclient如果显示
/usr/bin/gzserver
/usr/bin/gzclient则进入下一步
3.2安装
运行
sudo apt-get install ros-melodic-gazebo-ros-pkgs ros-melodic-gazebo-ros-control3.3测试
运行
roscore
rosrun gazebo_ros gazebo如果出现gazebo的gui界面,则安装成功