alpha-beta剪枝算法_组合游戏系列5: 井字棋、五子棋AlphaGo Zero 算法实战

 来源 | MyEncyclopedia 上一篇我们从原理层面解析了AlphaGo Zero如何改进MCTS算法,通过不断自我对弈,最终实现从零棋力开始训练直至能够打败任何高手。在本篇中,我们在已有的N子棋OpenAI Gym 环境中用Pytorch实现一个简化版的AlphaGo Zero算法。本篇所有代码在 github.com/MyEncyclopedia/ConnectNGym 中,其中部分参考了SongXiaoJun 的 github.com junxiaosong/AlphaZero_Gomoku。
来源 | MyEncyclopedia 上一篇我们从原理层面解析了AlphaGo Zero如何改进MCTS算法,通过不断自我对弈,最终实现从零棋力开始训练直至能够打败任何高手。在本篇中,我们在已有的N子棋OpenAI Gym 环境中用Pytorch实现一个简化版的AlphaGo Zero算法。本篇所有代码在 github.com/MyEncyclopedia/ConnectNGym 中,其中部分参考了SongXiaoJun 的 github.com junxiaosong/AlphaZero_Gomoku。
- 第一篇: Leetcode中的Minimax 和 Alpha Beta剪枝
- 第二篇: 井字棋Leetcode系列题解和Minimax最佳策略实现
- 第三篇: 井字棋、五子棋的OpenAI Gym GUI环境
- 第四篇: AlphaGo Zero 强化学习算法原理深度分析
- 第五篇: 井字棋、五子棋AlphaGo Zero 算法实战

AlphaGo Zero MCTS 树节点
上一篇中,我们知道AlphaGo Zero 的MCTS树搜索是基于传统MCTS 的UCT (UCB for Tree)的改进版PUCT(Polynomial Upper Confidence Trees)。局面节点的PUCT值由两部分组成,分别是代表Exploitation的action value Q值,和代表Exploration的U值。![]()

class TreeNode: """ MCTS Tree Node """ c_puct: ClassVar[int] = 5 # class-wise global param c_puct, exploration weight factor. _parent: TreeNode _children: Dict[int, TreeNode] # map from action to TreeNode _visit_num: int _Q: float # Q value of the node, which is the mean action value. _prior: float和上面的计算公式相对应,下列代码根据节点状态计算PUCT(s, a)。
class TreeNode: def get_puct(self) -> float: """ Computes AlphaGo Zero PUCT (polynomial upper confidence trees) of the node. :return: Node PUCT value. """ U = (TreeNode.c_puct * self._prior * np.sqrt(self._parent._visit_num) / (1 + self._visit_num)) return self._Q + UAlphaGo Zero MCTS在playout时遇到已经被展开的节点,会根据selection规则选择子节点,该规则本质上是在所有子节点中选择最大的PUCT值的节点。
class TreeNode: def select(self) -> Tuple[Pos, TreeNode]: """ Selects an action(Pos) having max UCB value. :return: Action and corresponding node """ return max(self._children.items(), key=lambda act_node: act_node[1].get_puct())新的叶节点一旦在playout时产生,关联的 v 值会一路向上更新至根节点,具体新节点的v值将在下一节中解释。
class TreeNode: def propagate_to_root(self, leaf_value: float): """ Updates current node with observed leaf_value and propagates to root node. :param leaf_value: :return: """ if self._parent: self._parent.propagate_to_root(-leaf_value) self._update(leaf_value) def _update(self, leaf_value: float): """ Updates the node by newly observed leaf_value. :param leaf_value: :return: """ self._visit_num += 1 # new Q is updated towards deviation from existing Q self._Q += 0.5 * (leaf_value - self._Q)
AlphaGo Zero MCTS Player 实现
AlphaGo Zero MCTS 在训练阶段分为如下几个步骤。游戏初始局面下,整个局面树的建立由子节点的不断被探索而丰富起来。AlphaGo Zero对弈一次即产生了一次完整的游戏开始到结束的动作系列。在对弈过程中的某一游戏局面,需要采样海量的playout,又称MCTS模拟,以此来决定此局面的下一步动作。一次playout可视为在真实游戏状态树的一种特定采样,playout可能会产生游戏结局,生成真实的v值;也可能explore 到新的叶子节点,此时v值依赖策略价值网络的输出,目的是利用训练的神经网络来产生高质量的游戏对战局面。每次playout会从当前给定局面递归向下,向下的过程中会遇到下面三种节点情况。
若局面节点是游戏结局(叶子节点),可以得到游戏的真实价值 z。从底部节点带着z向上更新沿途节点的Q值,直至根节点(初始局面)。
若局面节点从未被扩展过(叶子节点),此时会将局面编码输入到策略价值双头网络,输出结果为网络预估的action分布和v值。Action分布作为节点先验概率P(s, a)来初始化子节点,预估的v值和上面真实游戏价值z一样,从叶子节点向上沿途更新到根节点。
若局面节点已经被扩展过,则根据PUCT的select规则继续选择下一节点。

 Play 给定局面 对于当前需要做落子决定的某游戏局面 ,根据如下play公式生成落子分布 ,子局面的落子概率正比于其访问次数的某次方。其中,某次方的倒数称为温度参数(Temperature)。
Play 给定局面 对于当前需要做落子决定的某游戏局面 ,根据如下play公式生成落子分布 ,子局面的落子概率正比于其访问次数的某次方。其中,某次方的倒数称为温度参数(Temperature)。

class MCTSAlphaGoZeroPlayer(BaseAgent): def _next_step_play_act_probs(self, game: ConnectNGame) -> Tuple[List[Pos], ActionProbs]: """ For the given game status, run playouts number of times specified by self._playout_num. Returns the action distribution according to AlphaGo Zero MCTS play formula. :param game: :return: actions and their probability """ for n in range(self._playout_num): self._playout(copy.deepcopy(game)) act_visits = [(act, node._visit_num) for act, node in self._current_root._children.items()] acts, visits = zip(*act_visits) act_probs = softmax(1.0 / MCTSAlphaGoZeroPlayer.temperature * np.log(np.array(visits) + 1e-10)) return acts, act_probs在训练模式时,考虑到偏向exploration的目的,在 落子分布的基础上增加了 Dirichlet 分布。
class MCTSAlphaGoZeroPlayer(BaseAgent): def get_action(self, board: PyGameBoard) -> Pos: """ Method defined in BaseAgent. :param board: :return: next move for the given game board. """ return self._get_action(copy.deepcopy(board.connect_n_game))[0] def _get_action(self, game: ConnectNGame) -> Tuple[MoveWithProb]: epsilon = 0.25 avail_pos = game.get_avail_pos() move_probs: ActionProbs = np.zeros(game.board_size * game.board_size) assert len(avail_pos) > 0 # the pi defined in AlphaGo Zero paper acts, act_probs = self._next_step_play_act_probs(game) move_probs[list(acts)] = act_probs if self._is_training: # add Dirichlet Noise when training in favour of exploration p_ = (1-epsilon) * act_probs + epsilon * np.random.dirichlet(0.3 * np.ones(len(act_probs))) move = np.random.choice(acts, p=p_) assert move in game.get_avail_pos() else: move = np.random.choice(acts, p=act_probs) self.reset() return move, move_probs 一次完整的对弈
一次完整的对弈
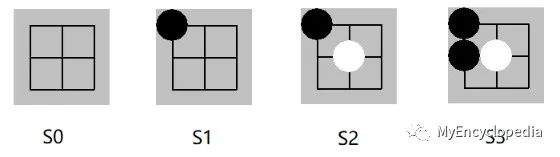
如下图 s0 到 s5 是某次井字棋的对弈。最终结局是先手黑棋玩家赢,即对于黑棋玩家 z = +1。需要注意的是:z = +1 是对于所有黑棋面临的局面,即s0, s2, s4,而对应的其余白棋玩家来说 z = -1。

一局完整对弈
以下代码展示如何在AI对弈时收集数据
class MCTSAlphaGoZeroPlayer(BaseAgent): def self_play_one_game(self, game: ConnectNGame) \ -> List[Tuple[NetGameState, ActionProbs, NDArray[(Any), np.float]]]: """ :param game: :return: Sequence of (s, pi, z) of a complete game play. The number of list is the game play length. """ states: List[NetGameState] = [] probs: List[ActionProbs] = [] current_players: List[np.float] = [] while not game.game_over: move, move_probs = self._get_action(game) states.append(convert_game_state(game)) probs.append(move_probs) current_players.append(game.current_player) game.move(move) current_player_z = np.zeros(len(current_players)) current_player_z[np.array(current_players) == game.game_result] = 1.0 current_player_z[np.array(current_players) == -game.game_result] = -1.0 self.reset() return list(zip(states, probs, current_player_z)) Playout 代码实现
Playout 代码实现
一次playout会从当前局面根据PUCT selection规则下沉到叶子节点,如果此叶子节点非游戏终结点,则会扩展当前节点生成下一层新节点,其先验分布由策略价值网络输出的action分布决定。一次playout最终会得到叶子节点的 v 值,并沿着MCTS树向上更新沿途的所有父节点 Q值。从上一篇文章已知,游戏节点的数量随着参数而指数级增长,举例来说,井字棋(k=3,m=n=3)的状态数量是5478,k=3,m=n=4时是6035992 ,k=m=n=4时是9722011 。如果我们将初始局面节点作为根节点,同时保存海量playout探索得到的局面节点,实现时会发现我们无法将所有探索到的局面节点都保存在内存中。这里的一种解决方法是在一次self play中每轮playout之后,将根节点重置成落子的节点,从而有效控制整颗局面树中的节点数量。
class MCTSAlphaGoZeroPlayer(BaseAgent): def _playout(self, game: ConnectNGame): """ From current game status, run a sequence down to a leaf node, either because game ends or unexplored node. Get the leaf value of the leaf node, either the actual reward of game or action value returned by policy net. And propagate upwards to root node. :param game: """ player_id = game.current_player node = self._current_root while True: if node.is_leaf(): break act, node = node.select() game.move(act) # now game state is a leaf node in the tree, either a terminal node or an unexplored node act_and_probs: Iterator[MoveWithProb] act_and_probs, leaf_value = self._policy_value_net.policy_value_fn(game) if not game.game_over: # case where encountering an unexplored leaf node, update leaf_value estimated by policy net to root for act, prob in act_and_probs: game.move(act) child_node = node.expand(act, prob) game.undo() else: # case where game ends, update actual leaf_value to root if game.game_result == ConnectNGame.RESULT_TIE: leaf_value = ConnectNGame.RESULT_TIE else: leaf_value = 1 if game.game_result == player_id else -1 leaf_value = float(leaf_value) # Update leaf_value and propagate up to root node node.propagate_to_root(-leaf_value) 编码游戏局面 为了将信息有效的传递给策略神经网络,必须从当前玩家的角度编码游戏局面。局面不仅要反映棋盘上黑白棋子的位置,也需要考虑最后一个落子的位置以及是否为当前玩家棋局。因此,我们将某局面按照当前玩家来编码,返回类型为4个棋盘大小组成的ndarray,即shape [4, board_size, board_size],其中
编码游戏局面 为了将信息有效的传递给策略神经网络,必须从当前玩家的角度编码游戏局面。局面不仅要反映棋盘上黑白棋子的位置,也需要考虑最后一个落子的位置以及是否为当前玩家棋局。因此,我们将某局面按照当前玩家来编码,返回类型为4个棋盘大小组成的ndarray,即shape [4, board_size, board_size],其中
- 第一个数组编码当前玩家的棋子位置
- 第二个数组编码对手玩家棋子位置
- 第三个表示最后落子位置
- 第四个全1表示此局面为先手(黑棋)局面,全0表示白棋局面
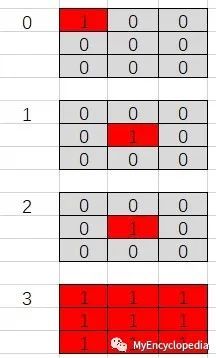
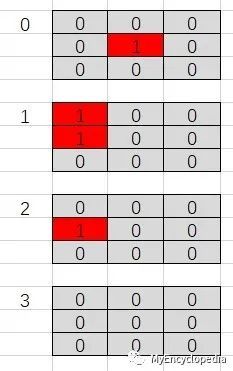
NetGameState = NDArray[(4, Any, Any), np.int]def convert_game_state(game: ConnectNGame) -> NetGameState: """ Converts game state to type NetGameState as ndarray. :param game: :return: Of shape 4 * board_size * board_size. [0] is current player positions. [1] is opponent positions. [2] is last move location. [3] all 1 meaning move by black player, all 0 meaning move by white. """ state_matrix = np.zeros((4, game.board_size, game.board_size)) if game.action_stack: actions = np.array(game.action_stack) move_curr = actions[::2] move_oppo = actions[1::2] for move in move_curr: state_matrix[0][move] = 1.0 for move in move_oppo: state_matrix[1][move] = 1.0 # indicate the last move location state_matrix[2][actions[-1]] = 1.0 if len(game.action_stack) % 2 == 0: state_matrix[3][:, :] = 1.0 # indicate the colour to play return state_matrix[:, ::-1, :] 策略价值网络训练 策略价值网络是一个共享参数 的双头网络,给定上面的游戏局面编码会产生预估的p和v。
策略价值网络训练 策略价值网络是一个共享参数 的双头网络,给定上面的游戏局面编码会产生预估的p和v。
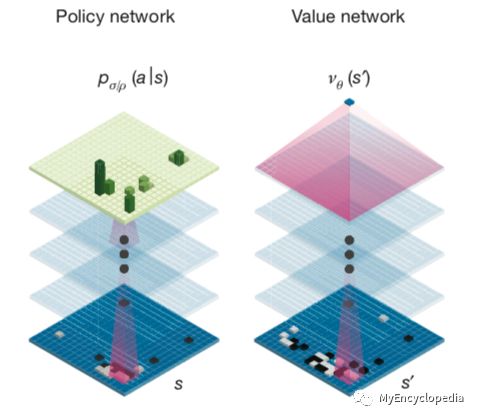 结合真实游戏对弈后产生三元组数据 ,按照论文中的loss 来训练神经网络。 下面代码为Pytorch backward部分。
结合真实游戏对弈后产生三元组数据 ,按照论文中的loss 来训练神经网络。 下面代码为Pytorch backward部分。
def backward_step(self, state_batch: List[NetGameState], probs_batch: List[ActionProbs], value_batch: List[NDArray[(Any), np.float]], lr) -> Tuple[float, float]: if self.use_gpu: state_batch = Variable(torch.FloatTensor(state_batch).cuda()) probs_batch = Variable(torch.FloatTensor(probs_batch).cuda()) value_batch = Variable(torch.FloatTensor(value_batch).cuda()) else: state_batch = Variable(torch.FloatTensor(state_batch)) probs_batch = Variable(torch.FloatTensor(probs_batch)) value_batch = Variable(torch.FloatTensor(value_batch)) self.optimizer.zero_grad() for param_group in self.optimizer.param_groups: param_group['lr'] = lr log_act_probs, value = self.policy_value_net(state_batch) # loss = (z - v)^2 - pi*T * log(p) + c||theta||^2 value_loss = F.mse_loss(value.view(-1), value_batch) policy_loss = -torch.mean(torch.sum(probs_batch * log_act_probs, 1)) loss = value_loss + policy_loss loss.backward() self.optimizer.step() entropy = -torch.mean(torch.sum(torch.exp(log_act_probs) * log_act_probs, 1)) return loss.item(), entropy.item()参考资料
Youtube, Deepmind AlphaZero - Mastering Games Without Human Knowledge, David Silver
Mastering the game of Go with deep neural networks and tree search
Mastering Chess and Shogi by Self-Play with a General Reinforcement Learning Algorithm
AlphaGo Zero论文解析
AlphaZero实战:从零学下五子棋(附代码)
更多精彩推荐激发企业大“智慧” | 深度赋能AI全场景 揭秘你不知道的移动云
- 首次在手机端不牺牲准确率实现BERT实时推理,比TensorFlow-Lite快近8倍,每帧只需45ms
- 美国 AI 博士一针见血:Python 这样学最容易成为高手!
- 从程序媛到微软全球 AKS 女掌门人,技术女神驾到!
- 常程跳槽小米,联想:已付竞业协议股权对价 500 万,须偿还