本文博客链接:http://blog.csdn.net/jdh99,作者:jdh,转载请注明.
环境:
主机:WIN10
python版本:3.5
开发环境:pyCharm
说明:
本文博客链接:http://blog.csdn.net/jdh99,作者:jdh,转载请注明.
环境:
主机:WIN10
python版本:3.5
开发环境:pyCharm
深度优先搜索原理和伪代码:

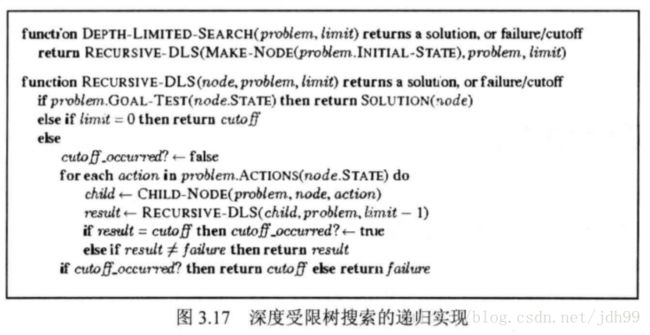
算法流程分析:
数据结构:
流程:
本算法会从第1个节点开始深度遍历,直到limit被消耗完,才返回。
算法性能分析:
import pandas as pd
from pandas import Series, DataFrame
# 城市信息:city1 city2 path_cost
_city_info = None
# 已探索集合
_explored = []
# 节点数据结构
class Node:
def __init__(self, state, parent, action, path_cost):
self.state = state
self.parent = parent
self.action = action
self.path_cost = path_cost
def main():
global _city_info, _explored
import_city_info()
while True:
src_city = input('input src city\n')
dst_city = input('input dst city\n')
limit = int(input('input limit\n'))
result = depth_limited_search(src_city, dst_city, limit)
if result == "failure" or result == "cutoff":
print('from city: %s to city %s search failure' % (src_city, dst_city))
else:
print('from city: %s to city %s search success' % (src_city, dst_city))
path = []
while True:
path.append(result.state)
if result.parent is None:
break
result = result.parent
size = len(path)
for i in range(size):
if i < size - 1:
print('%s->' % path.pop(), end='')
else:
print(path.pop())
def import_city_info():
global _city_info
data = [{'city1': 'Oradea', 'city2': 'Zerind', 'path_cost': 71},
{'city1': 'Oradea', 'city2': 'Sibiu', 'path_cost': 151},
{'city1': 'Zerind', 'city2': 'Arad', 'path_cost': 75},
{'city1': 'Arad', 'city2': 'Sibiu', 'path_cost': 140},
{'city1': 'Arad', 'city2': 'Timisoara', 'path_cost': 118},
{'city1': 'Timisoara', 'city2': 'Lugoj', 'path_cost': 111},
{'city1': 'Lugoj', 'city2': 'Mehadia', 'path_cost': 70},
{'city1': 'Mehadia', 'city2': 'Drobeta', 'path_cost': 75},
{'city1': 'Drobeta', 'city2': 'Craiova', 'path_cost': 120},
{'city1': 'Sibiu', 'city2': 'Fagaras', 'path_cost': 99},
{'city1': 'Sibiu', 'city2': 'Rimnicu Vilcea', 'path_cost': 80},
{'city1': 'Rimnicu Vilcea', 'city2': 'Craiova', 'path_cost': 146},
{'city1': 'Rimnicu Vilcea', 'city2': 'Pitesti', 'path_cost': 97},
{'city1': 'Craiova', 'city2': 'Pitesti', 'path_cost': 138},
{'city1': 'Fagaras', 'city2': 'Bucharest', 'path_cost': 211},
{'city1': 'Pitesti', 'city2': 'Bucharest', 'path_cost': 101},
{'city1': 'Bucharest', 'city2': 'Giurgiu', 'path_cost': 90},
{'city1': 'Bucharest', 'city2': 'Urziceni', 'path_cost': 85},
{'city1': 'Urziceni', 'city2': 'Vaslui', 'path_cost': 142},
{'city1': 'Urziceni', 'city2': 'Hirsova', 'path_cost': 98},
{'city1': 'Neamt', 'city2': 'Iasi', 'path_cost': 87},
{'city1': 'Iasi', 'city2': 'Vaslui', 'path_cost': 92},
{'city1': 'Hirsova', 'city2': 'Eforie', 'path_cost': 86}]
_city_info = DataFrame(data, columns=['city1', 'city2', 'path_cost'])
# print(_city_info)
def depth_limited_search(src_state, dst_state, limit):
global _explored
_explored = []
node = Node(src_state, None, None, 0)
return recursive_dls(node, dst_state, limit)
def recursive_dls(node, dst_state, limit):
"""
:param node:
:param dst_state:
:param limit:
:return: "failure":失败."cutoff":被截至.node:成功
"""
global _city_info, _explored
if node.parent is not None:
print('node state:%s parent state:%s' % (node.state, node.parent.state))
else:
print('node state:%s parent state:%s' % (node.state, None))
_explored.append(node.state)
# 目标测试
if node.state == dst_state:
print('this node is goal!')
return node
elif limit == 0:
print('this node is cutoff!')
return "cutoff"
else:
cutoff_occurred = False
# 遍历子节点
for i in range(len(_city_info)):
dst_city = ''
if _city_info['city1'][i] == node.state:
dst_city = _city_info['city2'][i]
elif _city_info['city2'][i] == node.state:
dst_city = _city_info['city1'][i]
if dst_city == '':
continue
child = Node(dst_city, node, 'go', node.path_cost + _city_info['path_cost'][i])
# 过滤已探索的点
if child.state in _explored:
continue
print('child node:state:%s path cost:%d' % (child.state, child.path_cost))
result = recursive_dls(child, dst_state, limit - 1)
if result == "cutoff":
cutoff_occurred = True
print('search failure, child state: %s parent state: %s limit cutoff' %
(child.state, child.parent.state))
elif result != "failure":
print('search success')
return result
if cutoff_occurred:
return "cutoff"
else:
return "failure"
if __name__ == '__main__':
main()
运行实例:
从Zerind导航到Urziceni,深度限制为20:
input src city
Zerind
input dst city
Urziceni
input limit
6
node state:Zerind parent state:None
child node:state:Oradea path cost:71
node state:Oradea parent state:Zerind
child node:state:Sibiu path cost:222
node state:Sibiu parent state:Oradea
child node:state:Arad path cost:362
node state:Arad parent state:Sibiu
child node:state:Timisoara path cost:480
node state:Timisoara parent state:Arad
child node:state:Lugoj path cost:591
node state:Lugoj parent state:Timisoara
child node:state:Mehadia path cost:661
node state:Mehadia parent state:Lugoj
this node is cutoff!
search failure, child state: Mehadia parent state: Lugoj limit cutoff
search failure, child state: Lugoj parent state: Timisoara limit cutoff
search failure, child state: Timisoara parent state: Arad limit cutoff
search failure, child state: Arad parent state: Sibiu limit cutoff
child node:state:Fagaras path cost:321
node state:Fagaras parent state:Sibiu
child node:state:Bucharest path cost:532
node state:Bucharest parent state:Fagaras
child node:state:Pitesti path cost:633
node state:Pitesti parent state:Bucharest
child node:state:Rimnicu Vilcea path cost:730
node state:Rimnicu Vilcea parent state:Pitesti
this node is cutoff!
search failure, child state: Rimnicu Vilcea parent state: Pitesti limit cutoff
child node:state:Craiova path cost:771
node state:Craiova parent state:Pitesti
this node is cutoff!
search failure, child state: Craiova parent state: Pitesti limit cutoff
search failure, child state: Pitesti parent state: Bucharest limit cutoff
child node:state:Giurgiu path cost:622
node state:Giurgiu parent state:Bucharest
child node:state:Urziceni path cost:617
node state:Urziceni parent state:Bucharest
this node is goal!
search success
search success
search success
search success
search success
from city: Zerind to city Urziceni search success
Zerind->Oradea->Sibiu->Fagaras->Bucharest->Urziceni
从Zerind导航到Urziceni,深度限制为6:
input src city
Zerind
input dst city
Urziceni
input limit
6
node state:Zerind parent state:None
child node:state:Oradea path cost:71
node state:Oradea parent state:Zerind
child node:state:Sibiu path cost:222
node state:Sibiu parent state:Oradea
child node:state:Arad path cost:362
node state:Arad parent state:Sibiu
child node:state:Timisoara path cost:480
node state:Timisoara parent state:Arad
child node:state:Lugoj path cost:591
node state:Lugoj parent state:Timisoara
child node:state:Mehadia path cost:661
node state:Mehadia parent state:Lugoj
this node is cutoff!
search failure, child state: Mehadia parent state: Lugoj limit cutoff
search failure, child state: Lugoj parent state: Timisoara limit cutoff
search failure, child state: Timisoara parent state: Arad limit cutoff
search failure, child state: Arad parent state: Sibiu limit cutoff
child node:state:Fagaras path cost:321
node state:Fagaras parent state:Sibiu
child node:state:Bucharest path cost:532
node state:Bucharest parent state:Fagaras
child node:state:Pitesti path cost:633
node state:Pitesti parent state:Bucharest
child node:state:Rimnicu Vilcea path cost:730
node state:Rimnicu Vilcea parent state:Pitesti
this node is cutoff!
search failure, child state: Rimnicu Vilcea parent state: Pitesti limit cutoff
child node:state:Craiova path cost:771
node state:Craiova parent state:Pitesti
this node is cutoff!
search failure, child state: Craiova parent state: Pitesti limit cutoff
search failure, child state: Pitesti parent state: Bucharest limit cutoff
child node:state:Giurgiu path cost:622
node state:Giurgiu parent state:Bucharest
child node:state:Urziceni path cost:617
node state:Urziceni parent state:Bucharest
this node is goal!
search success
search success
search success
search success
search success
from city: Zerind to city Urziceni search success
Zerind->Oradea->Sibiu->Fagaras->Bucharest->Urziceni