pytorch visdom安装,开启,使用
安装
conda activate ps
pip install visdom
激活ps的环境,在指定的ps环境中安装visdom
开启
python -m visdom.server
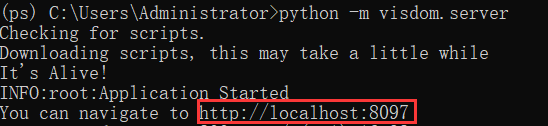
浏览器输入红框内的网址
使用
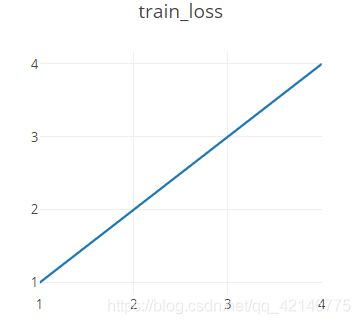
1. 简单示例:一条线
from visdom import Visdom
# 创建一个实例
viz=Visdom()
# 创建一个直线,再把最新数据添加到直线上
# y x二维两个轴,win 创建一个小窗口,不指定就默认为大窗口,opts其他信息比如名称
viz.line([1,2,3,4],[1,2,3,4],win="train_loss",opts=dict(title='train_loss'))
# 更一般的情况,因为下面y x数据不存在,只是示例
# append 添加到原来的后面,不然全部覆盖掉
# viz.line([loss.item()],[global_step],win="train_loss",update='append')
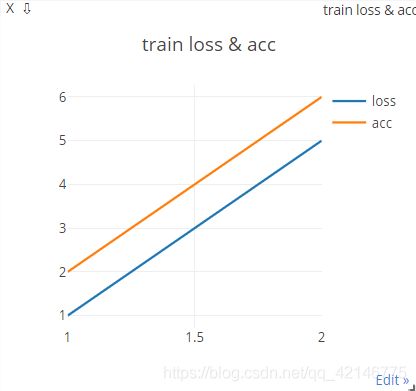
2. 简单示例:2条线
下面主要是[[y1],[y2]],[x] 两条映射,legend就是线条名称
from visdom import Visdom
viz=Visdom()
viz.line([[1,2],[5,6]],[1,2],win="loss_acc",opts=dict(title='train loss & acc',legend=['loss','acc']))
3. 显示图片
from visdom import Visdom
viz=Visdom()
# data 是一个batch
viz.image(data.view(-1,1,28,28),win='x')
viz.text(str(pred.datach().cpu().numpy()),win='pred',opts=dict(title='pred'))
4. 手写数字示例
动画效果图如下
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from torchvision import datasets, transforms
from visdom import Visdom
batch_size=200
learning_rate=0.01
epochs=10
train_loader = torch.utils.data.DataLoader(
datasets.MNIST('../data', train=True, download=True,
transform=transforms.Compose([
transforms.ToTensor(),
# transforms.Normalize((0.1307,), (0.3081,))
])),
batch_size=batch_size, shuffle=True)
test_loader = torch.utils.data.DataLoader(
datasets.MNIST('../data', train=False, transform=transforms.Compose([
transforms.ToTensor(),
# transforms.Normalize((0.1307,), (0.3081,))
])),
batch_size=batch_size, shuffle=True)
class MLP(nn.Module):
def __init__(self):
super(MLP, self).__init__()
self.model = nn.Sequential(
nn.Linear(784, 200),
nn.LeakyReLU(inplace=True),
nn.Linear(200, 200),
nn.LeakyReLU(inplace=True),
nn.Linear(200, 10),
nn.LeakyReLU(inplace=True),
)
def forward(self, x):
x = self.model(x)
return x
device = torch.device('cuda:0')
net = MLP().to(device)
optimizer = optim.SGD(net.parameters(), lr=learning_rate)
criteon = nn.CrossEntropyLoss().to(device)
viz = Visdom()
viz.line([0.], [0.], win='train_loss', opts=dict(title='train loss'))
viz.line([[0.0, 0.0]], [0.], win='test', opts=dict(title='test loss&acc.',
legend=['loss', 'acc.']))
global_step = 0
for epoch in range(epochs):
for batch_idx, (data, target) in enumerate(train_loader):
data = data.view(-1, 28*28)
data, target = data.to(device), target.cuda()
logits = net(data)
loss = criteon(logits, target)
optimizer.zero_grad()
loss.backward()
# print(w1.grad.norm(), w2.grad.norm())
optimizer.step()
global_step += 1
viz.line([loss.item()], [global_step], win='train_loss', update='append')
if batch_idx % 100 == 0:
print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(
epoch, batch_idx * len(data), len(train_loader.dataset),
100. * batch_idx / len(train_loader), loss.item()))
test_loss = 0
correct = 0
for data, target in test_loader:
data = data.view(-1, 28 * 28)
data, target = data.to(device), target.cuda()
logits = net(data)
test_loss += criteon(logits, target).item()
pred = logits.argmax(dim=1)
correct += pred.eq(target).float().sum().item()
viz.line([[test_loss, correct / len(test_loader.dataset)]],
[global_step], win='test', update='append')
viz.images(data.view(-1, 1, 28, 28), win='x')
viz.text(str(pred.detach().cpu().numpy()), win='pred',
opts=dict(title='pred'))
test_loss /= len(test_loader.dataset)
print('\nTest set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n'.format(
test_loss, correct, len(test_loader.dataset),
100. * correct / len(test_loader.dataset)))