【OpenCV】学习OpenCV3——常见的图像变换(1)
拉伸、收缩、扭曲和旋转
- 一、 均匀调整cv2.resize
- 二、 图像金字塔
-
- 2.1 高斯金字塔
-
- 2.1.1 下采样cv2.pyrDown()
- 2.1.2 高斯金字塔
- 2.2 拉普拉斯金字塔
-
- 2.2.1 上采样cv2.pyrUp()
- 2.2.2 拉普拉斯金字塔
- 三、不均匀映射
-
- 3.1 仿射变换
-
- 3.1.1 概念
- 3.1.2 应用
- 3.2 透视变换
-
- 3.2.1 概念
- 3.2.2 应用
我们遇到的简单的图像变换是调整图像的大小,使其变大或变小。这些操作比你想象的稍微复杂,因为调整也带来了像素如何差值(放大)或合并(减少)的问题。
一、 均匀调整cv2.resize
我们经常会遇到一些尺寸的图像,我们想转换成其他尺寸,可能想要增大或缩小图像,这两个操作都可以通过相同的函数实现。
dst=cv2.resize(src, dsize, fx=None, fy=None, interpolation=None)
| 参数 | 含义 |
|---|---|
| src | 输入图像 |
| dsize | 输出图像的大小:1)绝对尺寸,直接将dsize设置成想要输出的大小;2)相对尺寸,直接将值设为(0,0),并对fx,fy进行赋值 |
| fx=None | 沿水平轴的比例因子,既x轴缩放系数 |
| fy=None | 沿垂直轴的比例因子,既y轴缩放系数 |
| interpolation=None | 差值方法,默认为双线性差值。 |
| interpolation差值选项 | 含义 |
|---|---|
| cv2.INTER_NEAREST | 最近邻差值 |
| cv2.INTER_LINEAR | 双线性差值 |
| cv2.INTER_AREA | 像素区域重采样 |
| cv2.INTER_CUBIC | 双三次差值 |
| cv2.INTER_LANCZOS4 | 差值超过8*8个邻域 |
#调整图像大小
resize_img=cv2.resize(img,(750,750))#原图,想要调整的大小
二、 图像金字塔
图像金字塔是图像的集合,它由单个原始图像产生。常用的两种金字塔:高斯金字塔和拉普拉斯金字塔。
2.1 高斯金字塔
2.1.1 下采样cv2.pyrDown()
高斯金字塔用于降采样图像。
原理:将层Gi与高斯核卷积,然后去除每个偶数行和列,从而生成高斯金字塔的Gi+1层。在输入图像G0上不断迭代上述过程产生整个金字塔。
dst=cv2.pyrDown(src, dstsize=None, borderType=None)
| 参数 | 含义 |
|---|---|
| src | 输入图像 |
| dstsize=None | 输出图像的尺寸,默认条件下输出图像的大小为((src.shape[0]+1)/2,(src.shape[1]+1)/2),既是原图像的1/4.dstsize可以指明输出图像的大小,但必须遵循严格的限制。 |
| borderType=None | 边界填充的类型 |
dst=cv.pyrDown(temp)
2.1.2 高斯金字塔
原理:有一张图像,希望构建一系列新图像,每个都从其前身缩减。。
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
''''''
def pyramid_demo(image):
level=3#定义金字塔层数
temp=image.copy()
pyramid_images=[]
for i in range(level):
dst=cv.pyrDown(temp)#降采样
pyramid_images.append(dst)
cv.imshow('pyramid_down_'+str(i+1),dst)
temp=dst.copy()
return pyramid_images
img=cv.imread(r'D:\Project\Opencv\Learning01\angelababy.jpg')
cv.imshow('origin',img)
pyramid_demo(img)
cv.waitKey(0)
2.2 拉普拉斯金字塔
2.2.1 上采样cv2.pyrUp()
原理:将现有图像转换为每个方向两倍大的图像。
dst=cv2.pyrUp(src, dstsize=None, borderType=None)
| 参数 | 含义 |
|---|---|
| src | 输入图像 |
| dstsize=None | 输出图像的尺寸,默认条件下输出图像的大小为src的两倍大小相同。dstsize可以指明输出图像的大小,但必须遵循严格的限制。 |
| borderType=None | 边界填充的类型 |
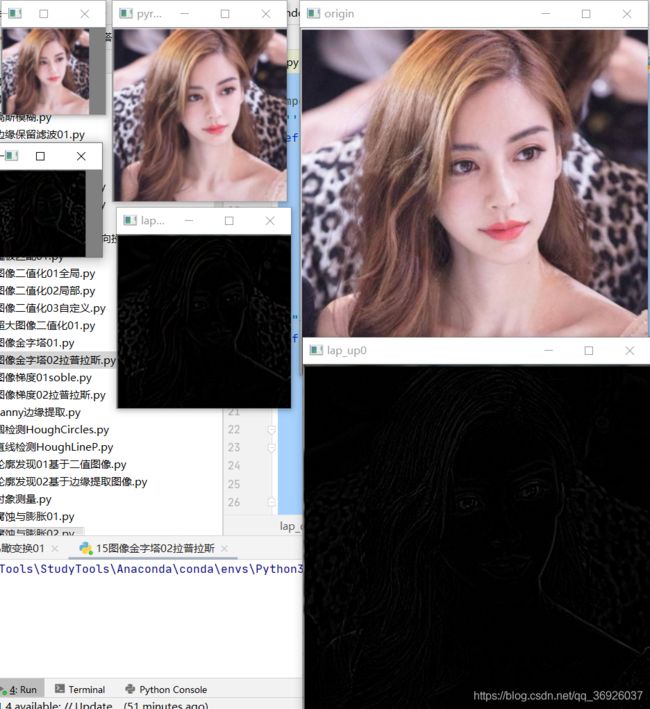
2.2.2 拉普拉斯金字塔
可以观察到,上采样并不是下采样的逆,因为下采样是丢失信息的操作,为了恢复原始图像,需要访问高斯金字塔下采样过程中丢失的信息,这个数据形成拉普拉斯金字塔。。
通过高斯金字塔可以得到拉普拉斯金字塔。Ln=gn-expand(gn-1)
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
'''高斯金字塔'''
def pyramid_demo(image):
level=3#定义金字塔层数
temp=image.copy()
pyramid_images=[]
for i in range(level):
dst=cv.pyrDown(temp)
pyramid_images.append(dst)
cv.imshow('pyramid_down_'+str(i+1),dst)
temp=dst.copy()
return pyramid_images#没有原图
"""拉普拉斯金字塔"""
def lap_demo(image):
'''拿到高斯金字塔'''
pyramid_images=pyramid_demo(image)#得到高斯金字塔
level=len(pyramid_images)
for i in range(level-1,-1,-1):#从最小的高斯金字塔开始,到最大的金字塔(没有包含原图)
if (i-1)<0:#原图
expand=cv.pyrUp(pyramid_images[i],dstsize=image.shape[:2])
lpls=cv.subtract(image,expand)
cv.imshow('lap_up'+str(i),lpls)
else:
expand = cv.pyrUp(pyramid_images[i], dstsize=pyramid_images[i-1].shape[:2])
lpls = cv.subtract(pyramid_images[i-1], expand) # 得到拉普拉斯金字塔
cv.imshow('lap_up'+str(i), lpls)
img=cv.imread(r'D:\Project\Opencv\Learning01\fang.png')
cv.imshow('origin',img)
lap_demo(img)
cv.waitKey(0)
三、不均匀映射
本节是图像的几何操作,这些操作包括均匀调整大小(详见1.1节)和不均匀调整大小(扭曲)。
几何变换:拉伸、扭曲、收缩、旋转图像。对于平面区域有两种几何变换:
(1)仿射变换:使用2×3矩阵的变换。
(2)透视变换:使用3×3矩阵的变换
参考1:https://zhuanlan.zhihu.com/p/36082864
参考2:https://blog.csdn.net/aliyanah_/article/details/85726042
参考3:https://blog.csdn.net/lz867422770/article/details/92799619
3.1 仿射变换
3.1.1 概念
定义:
仿射变换,又称仿射映射,是指在集合中,图像从一个向量空间进行一次线性变换和一次平移变换,变换到另一个向量空间的过程。
特征:
(1)仿射变换可以叫做【平面变换】或【二维坐标变换】。
(2)仿射变换保证二维图形的“平直性”和“平行性”。平直性:变换前是直线的,变换后也是直线;平行性:二维形状之间的相对位置关系保持不变。可以将任意矩形转换为平行四边形,可以挤压形状,但是都必须保持两边平行。
公式:
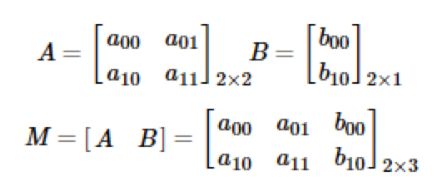
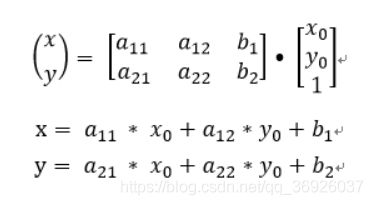
M:表示变换矩阵,包括线性变换矩阵A和平移矩阵B。
[x0,y0]:代表原始图像矩阵,是一个二维数组,x代表像素的横坐标,y代表像素的纵坐标。
(x,y):代表经过过仿射变换后的图像矩阵。
仿射变换的方程组有6个未知数,所以求解变换矩阵就要求3组映射点,三个点刚好确定一个平面。在应用层面,放射变换是图像基于3个固定顶点的变换。
(1)仿射变换进行图像平移:如果线性变换矩阵A=[[1, 0], [0,1]],那么A点乘矩阵[x, y]T 就不会改变[x, y]T的信息,此时,仿射变换就变成了平移操作,移动的行列值就是矩阵B中的元素值;
(2)仿射变换进行图像旋转:如果线性矩阵A=[[cosθ, -sinθ], [sinθ, cosθ]],那么线性变换就变成了图片的旋转操作,旋转角度θ。矩阵B代表旋转中心的坐标便宜量
3.1.2 应用
获得转换矩阵M=cv2.getAffineTransform(src, dst)。src和dst是3个点的数组在getAffineTransform中定义了两个平行四边形,src中的点通过应用warpAffine,使用转换矩阵M映射到dst中的对应点,所有其他点都将随之拖曳,一旦这三个独立的角点被映射,所有其他点的映射可以被完全确定。
| 参数 | 含义 |
|---|---|
| src | 源图像中3点坐标 |
| dst | 目标图像中3点坐标。 |
仿射变换:dst=cv2.warpAffine(src, M, dsize, flags=None, borderMode=None, borderValue=None)
| 参数 | 含义 |
|---|---|
| src | 源图像中四边形顶点的坐标 |
| M | 转换矩阵 |
| dsize | 输出图像的大小,类型与src相同 |
| flags=None | 差值方法,同cv2.resize的差值选项相同 |
| borderMode=None | 边界填充方法 |
| borderValue=None | 如果使用cv2.BORDER_CONSTANT则使用该值进行填充 |
import cv2
import numpy as np
img=cv2.imread(r'D:\Project\Opencv\Learning02\image022.png')
cv2.imshow('oringin image',img)
#定义3个点
width,height=250,350
pts1=np.float32([[98,189],[252,161],[135,419]])
pts2=np.float32([[0,0],[width,0],[0,height]])
#转换矩阵
matrix=cv2.getAffineTransform(pts1,pts2)
#转换后的图像
img_output=cv2.warpAffine(img,matrix,(width,height))
cv2.imshow("warp image",img_output)
#
cv2.waitKey(0)#0代表无限延迟,数值代表延迟多少毫秒
#
cv2.warpAffine()
3.2 透视变换
3.2.1 概念
定义:
透视变换就是将图片投影到一个新的视平面,也称为投影映射。
特征:
(1)透视变换可以叫做【空间变换】或【三维坐标变换】。
(2)透视变换改变了直线之间的平行关系。可以将矩形转换为任意四边形,不用保持物体形状的平直性。
公式:
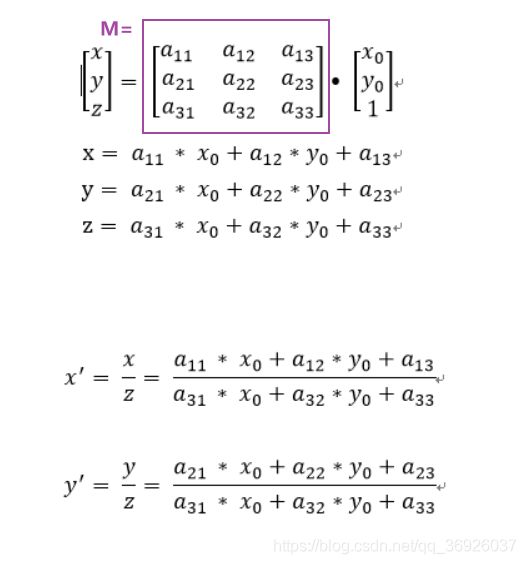
M:表示变换矩阵,包括线性变换矩阵A和平移矩阵B,仿射变换可以看作透视变换的一种特殊形式。
[x0,y0]:代表原始图像矩阵,是一个二维数组,x代表像素的横坐标,y代表像素的纵坐标。
(x’,y’):代表经过过仿射变换后的图像矩阵。
透视变换的方程组有8个未知数,所以求解变换矩阵就需要4组映射点,并且要保证至少三个不在一条直线上。四个点刚好确定一个三维空间。在应用层面,透视变换是图像基于4个固定顶点的变换。已知4个点的坐标和想要变换成的矩阵坐标,即可求出3*3的变换矩阵
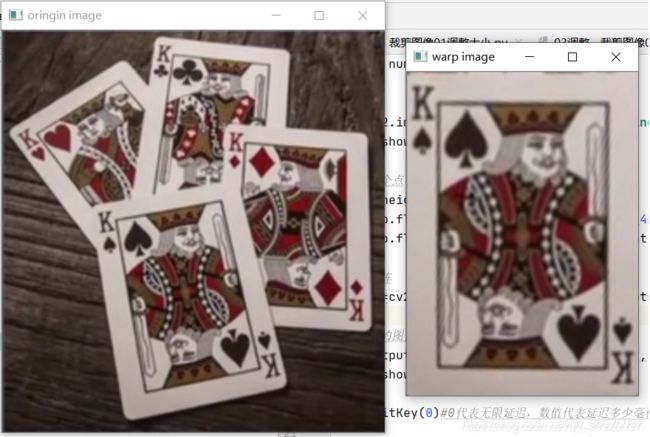
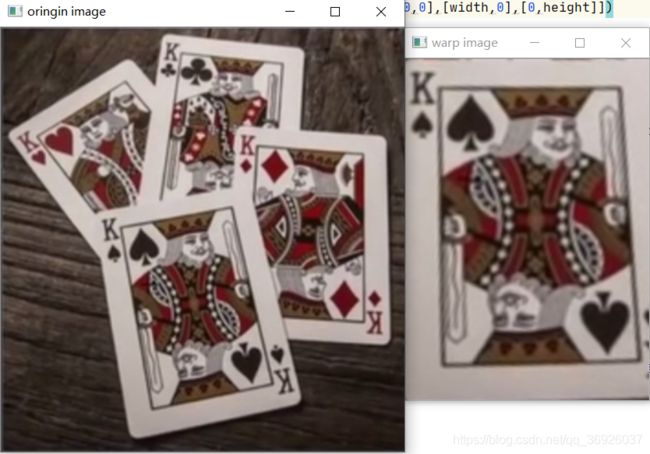
3.2.2 应用
获得转换矩阵:M=cv2.getPerspectiveTransform(src, dst)src和dst是4个点的数组。
| 参数 | 含义 |
|---|---|
| src | 源图像中四边形顶点的坐标 |
| dst | 目标图像中相应四边形顶点的坐标。 |
透视变换:dst=cv2.warpPerspective(src, M, dsize, flags=None, borderMode=None, borderValue=None)
| 参数 | 含义 |
|---|---|
| src | 源图像中四边形顶点的坐标 |
| M | 转换矩阵 |
| dsize | 输出图像的大小,类型与src相同 |
| flags=None | 差值方法,同cv2.resize的差值选项相同 |
| borderMode=None | 边界填充方法 |
| borderValue=None | 如果使用cv2.BORDER_CONSTANT则使用该值进行填充 |
import cv2
import numpy as np
img=cv2.imread(r'D:\Project\Opencv\Learning02\image02.png')
cv2.imshow('oringin image',img)
#定义四个点
width,height=250,350
pts1=np.float32([[98,189],[252,161],[135,419],[307,381]])
pts2=np.float32([[0,0],[width,0],[0,height],[width,height]])
#获得透视变换的转换矩阵
matrix=cv2.getPerspectiveTransform(pts1,pts2)
#转换后的图像
img_output=cv2.warpPerspective(img,matrix,(width,height))#参数:输入图像,3*3变换矩阵,输出图像的大小
cv2.imshow("warp image",img_output)
cv2.waitKey(0)#0代表无限延迟,数值代表延迟多少毫秒