yolov3 先验框讲解与代码实现
不同尺度先验框与目标物体大小
随着输出的特征图的数量和尺度的变化,先验框的尺寸也需要相应的调整。YOLO2已经开始采用K-means聚类得到先验框的尺寸,YOLO3延续了这种方法,为每种下采样尺度设定3种先验框,总共聚类出9种尺寸的先验框。在COCO数据集这9个先验框是:
(10x13),(16x30),(33x23),(30x61),(62x45),(59x119),(116x90),(156x198),(373x326)。
分配上,在最小的13 * 13特征图上(有最大的感受野)应用较大的先验框(116x90),(156x198),(373x326),适合检测较大的对象。
中等的26 * 26特征图上(中等感受野)应用中等的先验框(30x61),(62x45),(59x119),适合检测中等大小的对象。
较大的52 * 52特征图上(较小的感受野)应用较小的先验框(10x13),(16x30),(33x23),适合检测较小的对象。
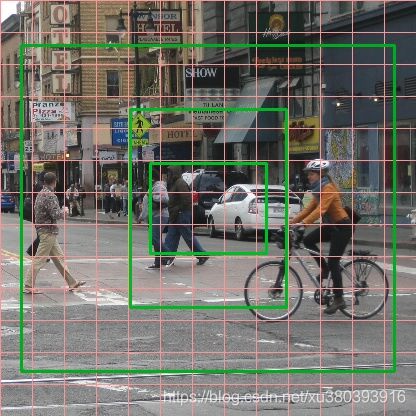
 图4 特征图与先验框
图4 特征图与先验框
感受一下9种先验框的尺寸,下图中蓝色框为聚类得到的先验框。黄色框式ground truth,红框是对象中心点所在的网格。
作者:X猪
链接:https://www.jianshu.com/p/d13ae1055302
来源:简书
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
代码实现
相关图片
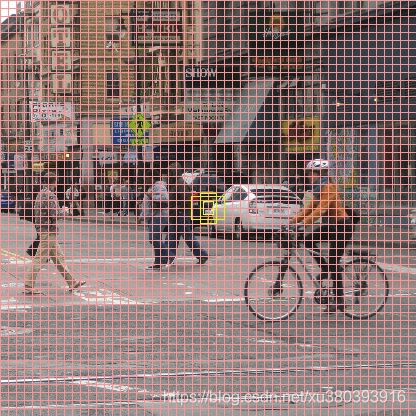
输入原图
13x13特征图先验框(绿色)
26x26特征图先验框(浅蓝色)

52x52特征图先验框(黄色)
代码
#!/usr/bin/env python
# -*- coding:utf-8 -*-
import cv2
def showPrioriBox():
#输入图片尺寸
INPUT_SIZE = 416
mask52= [0,1,2]
mask26= [3,4,5]
mask13= [6,7,8]
anchors=[ 10,13, 16,30, 33,23,
30,61, 62,45, 59,119,
116,90, 156,198, 373,326]
FEATURE_MAP_SIZE=26
SHOW_ALL_FLAG = True # 显示所有的方框
GRID_SHOW_FLAG =True
# cap = cv2.VideoCapture("street.jpg")
picPath = './street.jpg'
picName = picPath.split('/')[-1]
img = cv2.imread(picPath)
print("original img.shape: ",img.shape) # (1330, 1330, 3)
img = cv2.resize(img,(INPUT_SIZE, INPUT_SIZE))
# 显示网格
if GRID_SHOW_FLAG:
height, width, channels = img.shape
GRID_SIZEX = int(INPUT_SIZE/FEATURE_MAP_SIZE)
for x in range(0, width - 1, GRID_SIZEX):
cv2.line(img, (x, 0), (x, height), (150, 150, 255), 1, 1) # x grid
GRID_SIZEY = int(INPUT_SIZE / FEATURE_MAP_SIZE)
for y in range(0, height - 1, GRID_SIZEY):
cv2.line(img, (0, y), (width, y), (150, 150, 255), 1, 1) # x grid
# END:显示网格
# cv2.imshow('Hehe', img)
# cv2.imwrite('./' + picName.split('.')[0] + '_grid.' + picName.split('.')[1], img)
if SHOW_ALL_FLAG or FEATURE_MAP_SIZE==13:
for ele in mask13:
# print(ele)
cv2.rectangle(img, (
(int(INPUT_SIZE * 0.5 - 0.5*anchors[ ele * 2]), int(INPUT_SIZE * 0.5 - 0.5*anchors[ ele * 2 + 1]))),
((int(INPUT_SIZE * 0.5 + 0.5*anchors[ ele * 2]),
int(INPUT_SIZE * 0.5 + 0.5*anchors[ ele * 2 + 1]))), (0, 255-ele*10, 0), 2)
# cv2.imwrite('./' + picName.split('.')[0] + '_saveMask13.' + picName.split('.')[1], img)
if SHOW_ALL_FLAG or FEATURE_MAP_SIZE==26:
for ele in mask26:
# print(ele)
cv2.rectangle(img, (
(int(INPUT_SIZE * 0.5 - 0.5*anchors[ ele * 2]), int(INPUT_SIZE * 0.5 - 0.5*anchors[ ele * 2 + 1]))),
((int(INPUT_SIZE * 0.5 + 0.5*anchors[ ele * 2]),
int(INPUT_SIZE * 0.5 + 0.5*anchors[ ele * 2 + 1]))), (255, 255-ele*10, 0), 2)
# cv2.imwrite('./' + picName.split('.')[0] + '_saveMask26.' + picName.split('.')[1], img)
if SHOW_ALL_FLAG or FEATURE_MAP_SIZE==52:
for ele in mask52:
# print(ele)
cv2.rectangle(img, (
(int(INPUT_SIZE * 0.5 - 0.5*anchors[ ele * 2]), int(INPUT_SIZE * 0.5 - 0.5*anchors[ ele * 2 + 1]))),
((int(INPUT_SIZE * 0.5 + 0.5*anchors[ ele * 2]),
int(INPUT_SIZE * 0.5 + 0.5*anchors[ ele * 2 + 1]))), (0, 255-ele*10, 255), 1)
# cv2.imwrite('./' + picName.split('.')[0] + '_saveMask52.' + picName.split('.')[1], img)
cv2.imwrite('./' + picName.split('.')[0] + '_allSave.' + picName.split('.')[1], img)
cv2.imshow('img', img)
while cv2.waitKey(1000) != 27: # loop if not get ESC.
if cv2.getWindowProperty('img', cv2.WND_PROP_VISIBLE) <= 0:
break
cv2.destroyAllWindows()
if __name__ == '__main__':
showPrioriBox()