Redis+Zookeeper+NIO+JVM+Dubbo+mq+Kafka+ElasticSearch+POI相关面试题
一、Redis
1、Redis的应用场景
Redis相比其他缓存,有一个非常大的优势,就是支持多种数据类型。
数据类型说明string字符串,最简单的k-v存储hashhash格式,value为field和value,适合ID-Detail这样的场景。list简单的list,顺序列表,支持首位或者末尾插入数据set无序list,查找速度快,适合交集、并集、差集处理sorted set有序的set
其实,通过上面的数据类型的特性,基本就能想到合适的应用场景了。
string——适合最简单的k-v存储,类似于memcached的存储结构,短信验证码,配置信息等,就用这种类型来存储。
hash——一般key为ID或者唯一标识,value对应的就是详情了。如商品详情,个人信息详情,新闻详情等。
list——因为list是有序的,比较适合存储一些有序且数据相对固定的数据。如省市区表、字典表等。因为list是有序的,适合根据写入的时间来排序,如:最新的***,消息队列等。
set——可以简单的理解为ID-List的模式,如微博中一个人有哪些好友,set最牛的地方在于,可以对两个set提供交集、并集、差集操作。例如:查找两个人共同的好友等。
Sorted Set——是set的增强版本,增加了一个score参数,自动会根据score的值进行排序。比较适合类似于top 10等不根据插入的时间来排序的数据。—排行榜
如上所述,虽然Redis不像关系数据库那么复杂的数据结构,但是,也能适合很多场景,比一般的缓存数据结构要多。了解每种数据结构适合的业务场景,不仅有利于提升开发效率,也能有效利用Redis的性能。
2、Redis支持的数据类型(必考)
String、List、Set、Zset、Hash
3、 zset跳表的数据结构(必考)
有序集合ZSet的几个关键词:
是SortedSet和HashMap的结合;value具有唯一性;多了一个score;支持范围查询,结构如下:

3.1、跳跃表的特性
- 由很多层结构组成;
- 每一层都是一个有序的链表,排列顺序为由高层到底层,都至少包含两个链表节点,分别是前面的head节点和后面的nil节点;
- 最底层的链表包含了所有的元素;
- 如果一个元素出现在某一层的链表中,那么在该层之下的链表也全都会出现(上一层的元素是当前层的元素的子集);
- 链表中的每个节点都包含两个指针,一个指向同一层的下一个链表节点,另一个指向下一层的同一个链表节点。
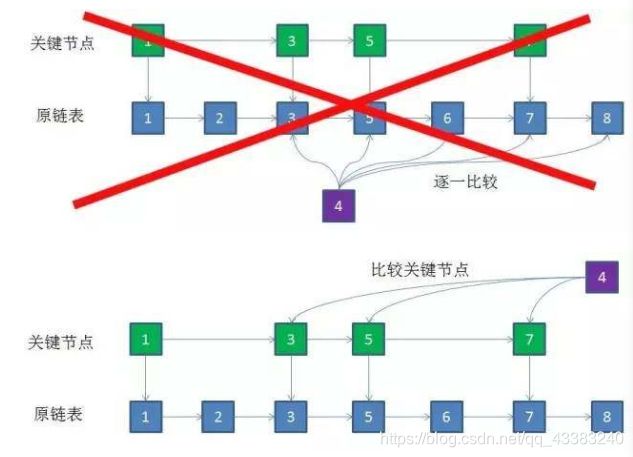
搜索:

其基本原理就是从最高层的链表节点(关 键节点)开始,如果比当前节点要大和比当前层的下一个节点要小,那么则往下找,也就是和当前层的下一层的节点的下一个节点进行比较,以此类推,一直找到最底层的最后一个节点,如果找到则返回,反之则返回空。
3.2、跳跃表快速的原因
每级遍历 3 个结点即可,而跳表的高度为 h ,所以每次查找一个结点时,需要遍历的结点数为 3*跳表高度 ,所以忽略低阶项和系数后的时间复杂度就是 ○(㏒n),空间复杂度是O(n)
4、 Redis的数据过期策略(必考)
惰性删除+定期删除
- 惰性删除流程
- 在进行get或setnx等操作时,先检查key是否过期,
- 若过期,删除key,然后执行相应操作;
- 若没过期,直接执行相应操作
- 定期删除流程(简单而言,对指定个数个库的每一个库随机删除小于等于指定个数个过期key)
- 遍历每个数据库(就是redis.conf中配置的"database"数量,默认为16)
- 检查当前库中的指定个数个key(默认是每个库检查20个key,注意相当于该循环执行20次,循环体时下边的描述)
- 如果当前库中没有一个key设置了过期时间,直接执行下一个库的遍历
- 随机获取一个设置了过期时间的key,检查该key是否过期,如果过期,删除key
- 判断定期删除操作是否已经达到指定时长,若已经达到,直接退出定期删除。
- 检查当前库中的指定个数个key(默认是每个库检查20个key,注意相当于该循环执行20次,循环体时下边的描述)
- 遍历每个数据库(就是redis.conf中配置的"database"数量,默认为16)
4.1、RDB对过期key的处理
过期key对RDB没有任何影响
- 从内存数据库持久化数据到RDB文件
- 持久化key之前,会检查是否过期,过期的key不进入RDB文件
- 从RDB文件恢复数据到内存数据库
- 数据载入数据库之前,会对key先进行过期检查,如果过期,不导入数据库(主库情况)
4.2、AOF对过期key的处理
过期key对AOF没有任何影响
- 从内存数据库持久化数据到AOF文件:
- 当key过期后,还没有被删除,此时进行执行持久化操作(该key是不会进入aof文件的,因为没有发生修改命令)
- 当key过期后,在发生删除操作时,程序会向aof文件追加一条del命令(在将来的以aof文件恢复数据的时候该过期的键就会被删掉)
- AOF重写
- 重写时,会先判断key是否过期,已过期的key不会重写到aof文件
4.3、Redis的过期键的删除策略
4.3.1、定时删除
每个设置过期时间的key都需要创建一个定时器,到过期时间就会立即清除。该策略可以立即清除过期的数据,对内存很友好;但是会占用大量的CPU资源去处理过期的数据,从而影响缓存的响应时间和吞吐量。
4.3.2、惰性删除
只有当访问一个key时,才会判断该key是否已过期,过期则清除。该策略可以最大化地节省CPU资源,却对内存非常不友好。极端情况可能出现大量的过期key没有再次被访问,从而不会被清除,占用大量内存。
4.3.3、定期删除
每隔一定的时间,会扫描一定数量的数据库的expires字典中一定数量的key,并清除其中已过期的key。该策略是前两者的一个折中方案。通过调整定时扫描的时间间隔和每次扫描的限定耗时,可以在不同情况下使得CPU和内存资源达到最优的平衡效果。
(expires字典会保存所有设置了过期时间的key的过期时间数据,其中,key是指向键空间中的某个键的指针,value是该键的毫秒精度的UNIX时间戳表示的过期时间。键空间是指该Redis集群中保存的所有键。)
Redis中同时使用了惰性过期和定期过期两种过期策略。
Redis key的过期时间和永久有效分别怎么设置?
EXPIRE和PERSIST命令。
4.4、对过期的数据的处理
除了缓存服务器自带的缓存失效策略之外(Redis默认的有6种策略可供选择),我们还可以根据具体的业务需求进行自定义的缓存淘汰,常见的策略有两种:
-
定时去清理过期的缓存;
-
当有用户请求过来时,再判断这个请求所用到的缓存是否过期,过期的话就去底层系统得到新数据并更新缓存。
两者各有优劣,第一种的缺点是维护大量缓存的key是比较麻烦的,第二种的缺点就是每次用户请求过来都要判断缓存失效,逻辑相对比较复杂!具体用哪种方案,大家可以根据自己的应用场景来权衡。
4.5、内存相关
MySQL里有2000w数据,redis中只存20w的数据,如何保证redis中的数据都是热点数据
redis内存数据集大小上升到一定大小的时候,就会施行数据淘汰策略。
Redis的内存淘汰策略有哪些
Redis的内存淘汰策略是指在Redis的用于缓存的内存不足时,怎么处理需要新写入且需要申请额外空间的数据。
全局的键空间选择性移除
- noeviction:当内存不足以容纳新写入数据时,新写入操作会报错。
- allkeys-lru:当内存不足以容纳新写入数据时,在键空间中,移除最近最少使用的key。(这个是最常用的)
- allkeys-random:当内存不足以容纳新写入数据时,在键空间中,随机移除某个key。
设置过期时间的键空间选择性移除
- volatile-lru:当内存不足以容纳新写入数据时,在设置了过期时间的键空间中,移除最近最少使用的key。
- volatile-random:当内存不足以容纳新写入数据时,在设置了过期时间的键空间中,随机移除某个key。
- volatile-ttl:当内存不足以容纳新写入数据时,在设置了过期时间的键空间中,有更早过期时间的key优先移除。
总结
Redis的内存淘汰策略的选取并不会影响过期的key的处理。内存淘汰策略用于处理内存不足时的需要申请额外空间的数据;过期策略用于处理过期的缓存数据。
5、Redis的LRU过期策略的具体实现(Least Recently Used)
5.1、什么是LRU?
简而言之,就是每次淘汰最近最少使用的元素 。一般的实现,都是采用对存储在内存的元素采用 'age bits’ 来标记该元素从上次访问到现在为止的时长,从而在每次用LRU淘汰时,淘汰这些最长时间未被访问的元素。
5.2、实现该缓存满足如下两点:
- 1.get(key) - 如果该元素(总是正数)存在,将该元素移动到lru头部,并返回该元素的值,否则返回-1。
- 2.set(key,value) - 设置一个key的值为value(如果该元素存在),并将该元素移动到LRU头部。否则插入一个key,且值为value。如果在设置前检查到,该key插入后,会超过cache的容量,则根据LRU策略,删除最近最少使用的key。
分析
这里我们采用双向链表来实现元素(k-v键值对)的存储,同时采用hash表来存储相关的key与item的对应关系。这样,我们既能在O(1)的时间对key进行操作,同时又能利用Double LinkedList的添加和删除节点的便利性。(get/set都能在O(1)内完成)。

5.3、 LRU淘汰的场景:
- 1.主动淘汰
- 1.1 通过定时任务
serverCron定期的清理过期的key。
- 1.1 通过定时任务
- 2.被动淘汰
- 2.1 每次写入key时,发现内存不够,调用
activeExpireCycle释放一部分内存。 - 2.2 每次访问相关的key,如果发现key过期,直接释放掉该key相关的内存。
- 2.1 每次写入key时,发现内存不够,调用
serverCron每间隔1000/hz ms会调用databasesCron方法来检测并淘汰过期的key。
主动淘汰是通过activeExpireCycle 来实现的,这部分的逻辑如下:
- 1.遍历至多16个DB 。【由宏
CRON_DBS_PER_CALL定义,默认为16】 - 2.随机挑选20个带过期时间的key。【由宏
ACTIVE_EXPIRE_CYCLE_LOOKUPS_PER_LOOP定义,默认20】 - 3.如果key过期,则将key相关的内存释放,或者放入失效队列。
- 4.如果操作时间超过允许的限定时间,至多25ms。(
timelimit = 1000000*ACTIVE_EXPIRE_CYCLE_SLOW_TIME_PERC/server.hz/100, ,ACTIVE_EXPIRE_CYCLE_SLOW_TIME_PERC=25,server.hz默认为10), 则此次淘汰操作结束返回,否则进入5。 - 5.如果该DB下,有超过5个key
(ACTIVE_EXPIRE_CYCLE_LOOKUPS_PER_LOOP/4=5)实际失效,则进入 2,否则选择下一个DB,再次进入2。 - 6.遍历完成,结束。
流程图如下
注:(图中大于等于%5的可以是实际过期的,应改为大于等于%25的key是实际过期的。iteration++是在遍历20个key的时候,每次加1)

被动淘汰 - 内存不够,调用activeExpireCycle释放
每次执行命令前,都会调用freeMemoryIfNeeded来检查内存的情况,并释放相应的内存,如果释放后,内存仍然不够,直接向请求的客户端返回OOM。
具体的步骤如下:
- 1.获取
redis server当前已经使用的内存mem_reported。 - 2.如果
mem_reported < server.maxmemory,则返回ok。否则mem_used=mem_reported,进入步骤3。 - 3.遍历该redis的所有slaves,
mem_used减去所有slave占用的ClientOutputBuffer。 - 4.如果配置了AOF,
mem_used减去AOF占用的空间。sdslen(server.aof_buf)+aofRewriteBufferSize()。 - 5.如果
mem_used < server.maxmemory,返回ok。否则进入步骤6。 - 6.如果内存策略配置为
noeviction,返回错误。否则进入7。 - 7.如果是LRU策略,如果是
VOLATILE的LRU,则每次从可失效的数据集中,每次随机采样maxmemory_samples(默认为5)个key,从中选取idletime最大的key进行淘汰。
否则,如果是ALLKEYS_LRU则从全局数据中进行采样,每次随机采样maxmemory_samples(默认为5)个key,并从中选择idletime最大的key进行淘汰。 - 8.如果释放内存之后,还是超过了
server.maxmemory,则继续淘汰,只到释放后剩下的内存小于server.maxmemory为止。
被动淘汰
- 每次访问相关的key,如果发现key过期,直接释放掉该key相关的内存:
每次访问key,都会调用expireIfNeeded来判断key是否过期,如果过期,则释放掉,并返回null,否则返回key的值。
5.4、总结
- 1.redis做为缓存,经常采用LRU的策略来淘汰数据,所以如果同时过期的数据太多,就会导致redis发起主动检测时耗费的时间过长(最大为250ms),从而导致最大应用超时 >= 250ms。
- 2.内存使用率过高,则会导致内存不够,从而发起被动淘汰策略,从而使应用访问超时。
- 3.合理的调整hz参数,从而控制每次主动淘汰的频率,从而有效的缓解过期的key数量太多带来的上述超时问题。
6、如何解决Redis缓存雪崩,缓存穿透问题
6.1、缓存雪崩
缓存雪崩是指缓存同一时间大面积的失效,所以,后面的请求都会落到数据库上,造成数据库短时间内承受大量请求而崩掉。
解决方案
- 缓存数据的过期时间设置随机,防止同一时间大量数据过期现象发生。
- 一般并发量不是特别多的时候,使用最多的解决方案是加锁排队。
- 给每一个缓存数据增加相应的缓存标记,记录缓存的是否失效,如果缓存标记失效,则更新数据缓存。
6.2、缓存穿透
缓存穿透是指缓存和数据库中都没有的数据,导致所有的请求都落到数据库上,造成数据库短时间内承受大量请求而崩掉。
解决方案
- 接口层增加校验,如用户鉴权校验,id做基础校验,id<=0的直接拦截;
- 从缓存取不到的数据,在数据库中也没有取到,这时也可以将key-value对写为key-null,缓存有效时间可以设置短点,如30秒(设置太长会导致正常情况也没法使用)。这样可以防止攻击用户反复用同一个id暴力攻击。
- 采用布隆过滤器,将所有可能存在的数据哈希到一个足够大的 bitmap 中,一个一定不存在的数据会被这个 bitmap 拦截掉,从而避免了对底层存储系统的查询压力
6.3、缓存击穿
缓存击穿是指缓存中没有但数据库中有的数据(一般是缓存时间到期),这时由于并发用户特别多,同时读缓存没读到数据,又同时去数据库去取数据,引起数据库压力瞬间增大,造成过大压力。和缓存雪崩不同的是,缓存击穿指并发查同一条数据,缓存雪崩是不同数据都过期了,很多数据都查不到从而查数据库。
解决方案
- 设置热点数据永远不过期。
- 加互斥锁,互斥锁
6.4、缓存预热
缓存预热就是系统上线后,将相关的缓存数据直接加载到缓存系统。这样就可以避免在用户请求的时候,先查询数据库,然后再将数据缓存的问题!用户直接查询事先被预热的缓存数据!
解决方案
-
直接写个缓存刷新页面,上线时手工操作一下;
-
数据量不大,可以在项目启动的时候自动进行加载;
-
定时刷新缓存;
6.5、缓存降级
当访问量剧增、服务出现问题(如响应时间慢或不响应)或非核心服务影响到核心流程的性能时,仍然需要保证服务还是可用的,即使是有损服务。系统可以根据一些关键数据进行自动降级,也可以配置开关实现人工降级。
缓存降级的最终目的是保证核心服务可用,即使是有损的。而且有些服务是无法降级的(如加入购物车、结算)。
在进行降级之前要对系统进行梳理,看看系统是不是可以丢卒保帅;从而梳理出哪些必须誓死保护,哪些可降级;比如可以参考日志级别设置预案:
-
一般:比如有些服务偶尔因为网络抖动或者服务正在上线而超时,可以自动降级;
-
警告:有些服务在一段时间内成功率有波动(如在95~100%之间),可以自动降级或人工降级,并发送告警;
-
错误:比如可用率低于90%,或者数据库连接池被打爆了,或者访问量突然猛增到系统能承受的最大阀值,此时可以根据情况自动降级或者人工降级;
-
严重错误:比如因为特殊原因数据错误了,此时需要紧急人工降级。
服务降级的目的,是为了防止Redis服务故障,导致数据库跟着一起发生雪崩问题。因此,对于不重要的缓存数据,可以采取服务降级策略,例如一个比较常见的做法就是,Redis出现问题,不去数据库查询,而是直接返回默认值给用户。
7、Redis的持久化机制(必考)
持久化就是把内存的数据写到磁盘中去,防止服务宕机了内存数据丢失。
Redis 提供两种持久化机制 RDB(默认) 和 AOF 机制:
7.1、RDB:是Redis DataBase缩写快照
RDB是Redis默认的持久化方式。按照一定的时间将内存的数据以快照的形式保存到硬盘中,对应产生的数据文件为dump.rdb。通过配置文件中的save参数来定义快照的周期。save m n 表示 m 秒时间,至少有 n 条数据更新,则保存到数据文件中。
eg :
save 9001 #900秒时间,至少有一条数据更新,则保存到数据文件中
save 30010 #300秒时间,至少有10条数据更新,则保存到数据文件中
save 6010000 #60秒时间,至少有10000条数据更新,则保存到数据文件中

优点:
- 1、只有一个文件 dump.rdb,方便持久化。
- 2、容灾性好,一个文件可以保存到安全的磁盘。
- 3、性能最大化,fork 子进程来完成写操作,让主进程继续处理命令,所以是 IO 最大化。使用单独子进程来进行持久化,主进程不会进行任何 IO 操作,保证了 redis 的高性能
- 4.相对于数据集大时,比 AOF 的启动效率更高。
缺点:
- 1、数据安全性低。RDB 是间隔一段时间进行持久化,如果持久化之间 redis 发生故障,会发生数据丢失。所以这种方式更适合数据要求不严谨的时候)。
7.2、AOF(即Append Only File持久化)
配置文件redis.conf中的appendonly修改为yes。开启AOF持久化后,你所执行的每一条指令,都会被记录到appendonly.aof文件中。
但事实上,并不会立即将命令写入到硬盘文件中,而是写入到硬盘缓存,在接下来的策略中,配置多久来从硬盘缓存写入到硬盘文件。所以在一定程度一定条件下,还是会有数据丢失,不过你可以大大减少数据损失。
当两种方式同时开启时,数据恢复Redis会优先选择AOF恢复。

这里是配置AOF持久化的策略。redis默认使用everysec,就是说每秒持久化一次,而always则是每次操作都会立即写入aof文件中。而no则是不主动进行同步操作,是默认30s一次。当然always一定是效率最低的,个人认为everysec就够用了,数据安全性能又高。
优点:
- 1、数据安全,aof 持久化可以配置 appendfsync 属性,有 always,每进行一次 命令操作就记录到 aof 文件中一次。
- 2、通过 append 模式写文件,即使中途服务器宕机,可以通过 redis-check-aof 工具解决数据一致性问题。
- 3、AOF 机制的 rewrite 模式。AOF 文件没被 rewrite 之前(文件过大时会对命令 进行合并重写),可以删除其中的某些命令(比如误操作的 flushall))
缺点:
- 1、AOF 文件比 RDB 文件大,且恢复速度慢。
- 2、数据集大的时候,比 rdb 启动效率低。
优缺点是什么?
- AOF文件比RDB更新频率高,优先使用AOF还原数据。
- AOF比RDB更安全也更大
- RDB性能比AOF好
- 如果两个都配了优先加载AOF
二、Zookeeper
1、CAP理论概述
CAP理论告诉我们,一个分布式系统不可能同时满足以下三种
- 一致性(C:Consistency)
- 可用性(A:Available)
- 分区容错性(P:Partition Tolerance)
这三个基本需求,最多只能同时满足其中的两项,因为P是必须的,因此往往选择就在CP或者AP中。
1.1、一致性(C:Consistency)
在分布式环境中,一致性是指数据在多个副本之间是否能够保持数据一致的特性。在一致性的需求下,当一个系统在数据一致的状态下执行更新操作后,应该保证系统的数据仍然处于一致的状态。例如一个将数据副本分布在不同分布式节点上的系统来说,如果对第一个节点的数据进行了更新操作并且更新成功后,其他节点上的数据也应该得到更新,并且所有用户都可以读取到其最新的值,那么这样的系统就被认为具有强一致性(或严格的一致性,最终一致性)。
1.2、可用性(A:Available)
可用性是指系统提供的服务必须一直处于可用的状态,对于用户的每一个操作请求总是能够在有限的时间内返回结果。“有效的时间内”是指,对于用户的一个操作请求,系统必须能够在指定的时间(即响应时间)内返回对应的处理结果,如果超过了这个时间范围,那么系统就被认为是不可用的。
“返回结果”是可用性的另一个非常重要的指标,它要求系统在完成对用户请求的处理后,返回一个正常的响应结果。正常的响应结果通常能够明确的反映出对请求的处理结果,即成功或失败,而不是一个让用户感到困惑的返回结果。
1.3、分区容错性(P:Partition Tolerance)
分区容错性约束了一个分布式系统需要具有如下特性:分布式系统在遇到任何网络分区故障的时候,仍然需要能够保证对外提供满足一致性和可用性的服务,除非是整个网络环境都发生了故障。
网络分区是指在分布式系统中,不同的节点分布在不同的子网络(机房或异地网络等)中,由于一些特殊的原因导致这些子网络之间出现网络不连通的状况,但各个子网络的内部网络是正常的,从而导致整个系统的网络环境被切分成了若干个孤立的区域。需要注意的是,组成一个分布式系统的每个节点的加入与退出都可以看作是一个特殊的网络分区。
由于一个分布式系统无法同时满足上面的三个需求,而只能满足其中的两项,因此在进行对CAP定理的应用的时候,需要根据业务的要求抛弃其中的一项,下表所示是抛弃CAP定理中任意一项特性的场景说明。
因此,将精力浪费在思考如何设计能满足三者的完美系统上是愚钝的,应该根据应用场景进行适当取舍。
1.1.2、一致性的分类
一致性是指从系统外部读取系统内部的数据时,在一定约束条件下相同,即数据变动在系统内部各节点应该是同步的。根据一致性的强弱程度不同,可以将一致性的分类为如下几种:
-
强一致性:(strong consistency)。任何时刻,任何用户都能读取到最近一次成功更新的数据。
-
单调一致性:(monotonic consistency)。任何时刻,任何用户一旦读到某个数据在某次更新后的值,那么就不会再读到比这个值更旧的值。也就是说,可获取的数据顺序必是单调递增的。
-
会话一致性:(session consistency)。任何用户在某次会话中,一旦读到某个数据在某次更新后的值,那么在本次会话中就不会再读到比这值更旧的值,会话一致性是在单调一致性的基础上进一步放松约束,只保证单个用户单个会话内的单调性,在不同用户或同一用户不同会话间则没有保障。
-
最终一致性:(eventual consistency)。用户只能读到某次更新后的值,但系统保证数据将最终达到完全一致的状态,只是所需时间不能保障。
-
弱一致性:(weak consistency)。用户无法在确定时间内读到最新更新的值。
1.1.3、ZooKeeper提供的一致性服务
ZooKeeper从以下几点保证了数据的一致性
-
顺序一致性:来自任意特定客户端的更新都会按其发送顺序被提交保持一致。也就是说,如果一个客户端将Znode z的值更新为a,在之后的操作中,它又将z的值更新为b,则没有客户端能够在看到z的值是b之后再看到值a(如果没有其他对z的更新)。
-
原子性:每个更新要么成功,要么失败。这意味着如果一个更新失败,则不会有客户端会看到这个更新的结果。
-
单一系统映像:一个客户端无论连接到哪一台服务器,它看到的都是同样的系统视图。这意味着,如果一个客户端在同一个会话中连接到一台新的服务器,它所看到的系统状态不会比 在之前服务器上所看到的更老。当一台服务器出现故障,导致它的一个客户端需要尝试连接集合体中其他的服务器时,所有滞后于故障服务器的服务器都不会接受该 连接请求,除非这些服务器赶上故障服务器。
-
持久性:一个更新一旦成功,其结果就会持久存在并且不会被撤销。这表明更新不会受到服务器故障的影响。
-
实时性:在特定的一段时间内,客户端看到的系统需要被保证是实时的(在十几秒的时间里)。在此时间段内,任何系统的改变将被客户端看到,或者被客户端侦测到。
1.4、用CAP理论来分析ZooKeeper
CAP理论告诉我们,一个分布式系统不可能同时满足以下三种
- 一致性(C:Consistency)
- 可用性(A:Available)
- 分区容错性(P:Partition Tolerance)
这三个基本需求,最多只能同时满足其中的两项,因为P是必须的,因此往往选择就在CP或者AP中。
在此ZooKeeper保证的是CP
分析:可用性(A:Available)
不能保证每次服务请求的可用性。 任何时刻对ZooKeeper的访问请求能得到一致的数据结果,同时系统对网络分割具备容错性;但是它不能保证每次服务请求的可用性(注:也就是在极端环境下,ZooKeeper可能会丢弃一些请求,消费者程序需要重新请求才能获得结果)。所以说,ZooKeeper不能保证服务可用性。
进行leader选举时集群都是不可用。 在使用ZooKeeper获取服务列表时,当master节点因为网络故障与其他节点失去联系时,剩余节点会重新进行leader选举。问题在于,选举leader的时间太长,30 ~ 120s, 且选举期间整个zk集群都是不可用的,这就导致在选举期间注册服务瘫痪,虽然服务能够最终恢复,但是漫长的选举时间导致的注册长期不可用是不能容忍的。所以说,ZooKeeper不能保证服务可用性。
2、ZAB协议
2.1、什么是Zab协议?
Zab协议 的全称是 Zookeeper Atomic Broadcast (Zookeeper原子广播)。
Zookeeper 是通过 Zab 协议来保证分布式事务的最终一致性。
-
Zab协议是为分布式协调服务Zookeeper专门设计的一种 支持崩溃恢复 的 原子广播协议 ,是Zookeeper保证数据一致性的核心算法。Zab借鉴了Paxos算法,但又不像Paxos那样,是一种通用的分布式一致性算法。它是特别为Zookeeper设计的支持崩溃恢复的原子广播协议。
-
在Zookeeper中主要依赖Zab协议来实现数据一致性,基于该协议,zk实现了一种主备模型(即Leader和Follower模型)的系统架构来保证集群中各个副本之间数据的一致性。
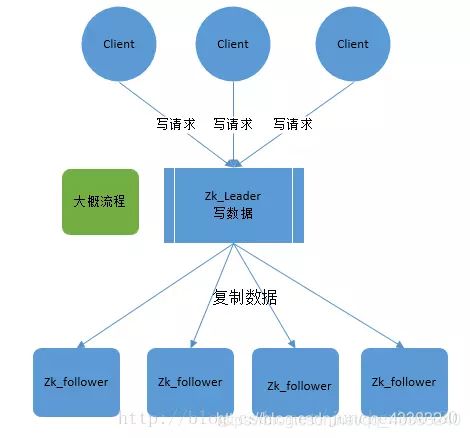
这里的主备系统架构模型,就是指只有一台客户端(Leader)负责处理外部的写事务请求,然后Leader客户端将数据同步到其他Follower节点。
Zookeeper 客户端会随机的链接到 zookeeper 集群中的一个节点,如果是读请求,就直接从当前节点中读取数据;如果是写请求,那么节点就会向 Leader 提交事务,Leader 接收到事务提交,会广播该事务,只要超过半数节点写入成功,该事务就会被提交。
2.2、Zab 协议的特性:
1)Zab 协议需要确保那些已经在 Leader 服务器上提交(Commit)的事务最终被所有的服务器提交。
2)Zab 协议需要确保丢弃那些只在 Leader 上被提出而没有被提交的事务。
2.3、Zab 协议实现的作用
-
1)使用一个单一的主进程(Leader)来接收并处理客户端的事务请求(也就是写请求),并采用了Zab的原子广播协议,将服务器数据的状态变更以 事务proposal (事务提议)的形式广播到所有的副本(Follower)进程上去。
-
2)保证一个全局的变更序列被顺序引用。
Zookeeper是一个树形结构,很多操作都要先检查才能确定是否可以执行,比如P1的事务t1可能是创建节点"/a",t2可能是创建节点"/a/bb",只有先创建了父节点"/a",才能创建子节点"/a/b"。为了保证这一点,Zab要保证同一个Leader发起的事务要按顺序被apply,同时还要保证只有先前Leader的事务被apply之后,新选举出来的Leader才能再次发起事务。
-
3)当主进程出现异常的时候,整个zk集群依旧能正常工作。
2.4、Zab协议原理
Zab协议要求每个 Leader 都要经历三个阶段:发现,同步,广播。
-
发现:要求zookeeper集群必须选举出一个 Leader 进程,同时 Leader 会维护一个 Follower 可用客户端列表。将来客户端可以和这些 Follower节点进行通信。
-
同步:Leader 要负责将本身的数据与 Follower 完成同步,做到多副本存储。这样也是提现了CAP中的高可用和分区容错。Follower将队列中未处理完的请求消费完成后,写入本地事务日志中。
-
广播:Leader 可以接受客户端新的事务Proposal请求,将新的Proposal请求广播给所有的 Follower。
2.5、Zab协议核心
Zab协议的核心:定义了事务请求的处理方式
-
1)所有的事务请求必须由一个全局唯一的服务器来协调处理,这样的服务器被叫做 Leader服务器。其他剩余的服务器则是 Follower服务器。
-
2)Leader服务器 负责将一个客户端事务请求,转换成一个 事务Proposal,并将该 Proposal 分发给集群中所有的 Follower 服务器,也就是向所有 Follower 节点发送数据广播请求(或数据复制)
-
3)分发之后Leader服务器需要等待所有Follower服务器的反馈(Ack请求),在Zab协议中,只要超过半数的Follower服务器进行了正确的反馈后(也就是收到半数以上的Follower的Ack请求),那么 Leader 就会再次向所有的 Follower服务器发送 Commit 消息,要求其将上一个 事务proposal 进行提交。
2.6、Zab协议内容
Zab 协议包括两种基本的模式:崩溃恢复 和 消息广播
协议过程
当整个集群启动过程中,或者当 Leader 服务器出现网络中断、崩溃退出或重启等异常时,Zab协议就会 进入崩溃恢复模式,选举产生新的Leader。
当选举产生了新的 Leader,同时集群中有过半的机器与该 Leader 服务器完成了状态同步(即数据同步)之后,Zab协议就会退出崩溃恢复模式,进入消息广播模式。
这时,如果有一台遵守Zab协议的服务器加入集群,因为此时集群中已经存在一个Leader服务器在广播消息,那么该新加入的服务器自动进入恢复模式:找到Leader服务器,并且完成数据同步。同步完成后,作为新的Follower一起参与到消息广播流程中。
协议状态切换
当Leader出现崩溃退出或者机器重启,亦或是集群中不存在超过半数的服务器与Leader保存正常通信,Zab就会再一次进入崩溃恢复,发起新一轮Leader选举并实现数据同步。同步完成后又会进入消息广播模式,接收事务请求。
保证消息有序
在整个消息广播中,Leader会将每一个事务请求转换成对应的 proposal 来进行广播,并且在广播 事务Proposal 之前,Leader服务器会首先为这个事务Proposal分配一个全局单递增的唯一ID,称之为事务ID(即zxid),由于Zab协议需要保证每一个消息的严格的顺序关系,因此必须将每一个proposal按照其zxid的先后顺序进行排序和处理。
2.7、消息广播
-
1)在zookeeper集群中,数据副本的传递策略就是采用消息广播模式。zookeeper中农数据副本的同步方式与二段提交相似,但是却又不同。二段提交要求协调者必须等到所有的参与者全部反馈ACK确认消息后,再发送commit消息。要求所有的参与者要么全部成功,要么全部失败。二段提交会产生严重的阻塞问题。
-
2)Zab协议中 Leader 等待 Follower 的ACK反馈消息是指“只要半数以上的Follower成功反馈即可,不需要收到全部Follower反馈”
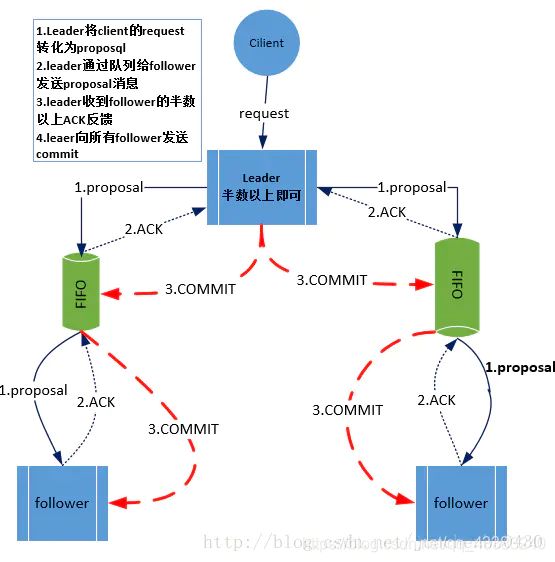
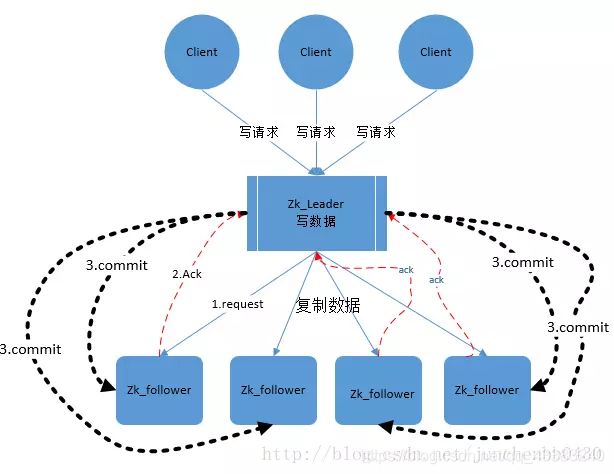
2.7.1、消息广播具体步骤
1)客户端发起一个写操作请求。
2)Leader 服务器将客户端的请求转化为事务 Proposal 提案,同时为每个 Proposal 分配一个全局的ID,即zxid。
3)Leader 服务器为每个 Follower 服务器分配一个单独的队列,然后将需要广播的 Proposal 依次放到队列中取,并且根据 FIFO 策略进行消息发送。
4)Follower 接收到 Proposal 后,会首先将其以事务日志的方式写入本地磁盘中,写入成功后向 Leader 反馈一个 Ack 响应消息。
5)Leader 接收到超过半数以上 Follower 的 Ack 响应消息后,即认为消息发送成功,可以发送 commit 消息。
6)Leader 向所有 Follower 广播 commit 消息,同时自身也会完成事务提交。Follower 接收到 commit 消息后,会将上一条事务提交。
zookeeper 采用 Zab 协议的核心,就是只要有一台服务器提交了 Proposal,就要确保所有的服务器最终都能正确提交 Proposal。这也是 CAP/BASE 实现最终一致性的一个体现。
Leader 服务器与每一个 Follower 服务器之间都维护了一个单独的 FIFO 消息队列进行收发消息,使用队列消息可以做到异步解耦。 Leader 和 Follower 之间只需要往队列中发消息即可。如果使用同步的方式会引起阻塞,性能要下降很多。
3、leader 选举算法与流程
Leader选举是保证分布式数据一致性的关键所在。Leader选举分为Zookeeper集群初始化启动时选举和Zookeeper集群运行期间Leader重新选举两种情况。在讲解Leader选举前先了解一下Zookeeper节点4种可能状态和事务ID概念。
3.1、Zookeeper节点状态
- LOOKING:寻找Leader状态,处于该状态需要进入选举流程
- LEADING:领导者状态,处于该状态的节点说明是角色已经是Leader
- FOLLOWING:跟随者状态,表示Leader已经选举出来,当前节点角色是follower
- OBSERVER:观察者状态,表明当前节点角色是observer
3.2、事务ID
ZooKeeper状态的每次变化都接收一个ZXID(ZooKeeper事务id)形式的标记。ZXID是一个64位的数字,由Leader统一分配,全局唯一,不断递增。
ZXID展示了所有的ZooKeeper的变更顺序。每次变更会有一个唯一的zxid,如果zxid1小于zxid2说明zxid1在zxid2之前发生。
3.3、Zookeeper集群初始化启动时Leader选举
若进行Leader选举,则至少需要两台机器,这里选取3台机器组成的服务器集群为例。
初始化启动期间Leader选举流程如下图所示。

在集群初始化阶段,当有一台服务器ZK1启动时,其单独无法进行和完成Leader选举,当第二台服务器ZK2启动时,此时两台机器可以相互通信,每台机器都试图找到Leader,于是进入Leader选举过程。选举过程开始,过程如下:
-
(1) 每个Server发出一个投票。由于是初始情况,ZK1和ZK2都会将自己作为Leader服务器来进行投票,每次投票会包含所推举的服务器的myid和ZXID,使用(myid, ZXID)来表示,此时ZK1的投票为(1, 0),ZK2的投票为(2, 0),然后各自将这个投票发给集群中其他机器。
-
(2) 接受来自各个服务器的投票。集群的每个服务器收到投票后,首先判断该投票的有效性,如检查是否是本轮投票、是否来自LOOKING状态的服务器。
-
(3) 处理投票。针对每一个投票,服务器都需要将别人的投票和自己的投票进行比较,规则如下
- 优先检查ZXID。ZXID比较大的服务器优先作为Leader。
- 如果ZXID相同,那么就比较myid。myid较大的服务器作为Leader服务器。
对于ZK1而言,它的投票是(1, 0),接收ZK2的投票为(2, 0),首先会比较两者的ZXID,均为0,再比较myid,此时ZK2的myid最大,于是ZK2胜。ZK1更新自己的投票为(2, 0),并将投票重新发送给ZK2。
-
(4) 统计投票。每次投票后,服务器都会统计投票信息,判断是否已经有过半机器接受到相同的投票信息,对于ZK1、ZK2而言,都统计出集群中已经有两台机器接受了(2, 0)的投票信息,此时便认为已经选出ZK2作为Leader。
-
(5) 改变服务器状态。一旦确定了Leader,每个服务器就会更新自己的状态,如果是Follower,那么就变更为FOLLOWING,如果是Leader,就变更为LEADING。当新的Zookeeper节点ZK3启动时,发现已经有Leader了,不再选举,直接将直接的状态从LOOKING改为FOLLOWING。
3.4、Zookeeper集群运行期间Leader重新选
在Zookeeper运行期间,如果Leader节点挂了,那么整个Zookeeper集群将暂停对外服务,进入新一轮Leader选举。
假设正在运行的有ZK1、ZK2、ZK3三台服务器,当前Leader是ZK2,若某一时刻Leader挂了,此时便开始Leader选举。选举过程如下图所示。
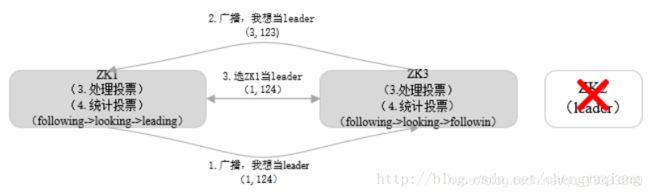
- (1) 变更状态。Leader挂后,余下的非Observer服务器都会讲自己的服务器状态变更为LOOKING,然后开始进入Leader选举过程。
- (2) 每个Server会发出一个投票。在运行期间,每个服务器上的ZXID可能不同,此时假定ZK1的ZXID为124,ZK3的ZXID为123;在第一轮投票中,ZK1和ZK3都会投自己,产生投票(1, 124),(3, 123),然后各自将投票发送给集群中所有机器。
- (3) 接收来自各个服务器的投票。与启动时过程相同。
- (4) 处理投票。与启动时过程相同,由于ZK1事务ID大,ZK1将会成为Leader。
- (5) 统计投票。与启动时过程相同。
- (6) 改变服务器的状态。与启动时过程相同。
三、BIO、NIO、AIO
1、BIO
同步并阻塞,服务器实现模式为一个连接一个线程,每个线程亲自处理io并且一直等待io的完成,即客户端有连接请求时服务器端就需要启动一个线程进行处理,如果这个连接不做任何事情会造成不必要的线程开销,当然可以通过线程池机制改善。
IO的局限:IO是面向流的,阻塞式的,串行的一个过程。对每一个客户端的socket连接,IO都需要一个线程来处理,而且在此期间,这个线程一直被占用,直到socket关闭。在这期间,tcp的连接、数据的读取、数据的返回都是被阻塞的。也就是说这期间大量的浪费了cpu的时间片和线程占用的内存资源。
每建立一个Socket连接时,同时创建一个新线程对该Socket进行单独通信(采用阻塞的方式通信)。这种方式具有很高的响应速度,并且控制起来也很简单,在连接数较少的时候非常有效,但是如果对每一个连接都产生一个线程的无疑是对系统资源的一种浪费,如果连接数较多将会出现资源不足的情况。
2、NIO同步非阻塞式IO
同步非阻塞,服务器实现模式为一个请求一个线程,每个线程亲自处理io,但有另外的线程轮询检查是否io准备完毕,不必等待io完成,即客户端发送的连接请求都会注册到多路复用器上,多路复用器轮询到连接有I/O请求时才启动一个线程进行处理。
NIO则是面向缓冲区的,非阻塞式的,基于选择器的,用一个线程来轮询监控多个数据传输通道,哪个通道准备好了(即有了一组可以处理的数据),就处理哪个通道。
服务器端保存一个Socket连接列表,然后对这个列表进行轮询,如果发现某个Socket端口上有数据可读时(读就绪),则调用该socket连接的相应读操作;如果发现某个 Socket端口上有数据可写时(写就绪),则调用该socket连接的相应写操作;如果某个端口的Socket连接已经中断,则调用相应的析构方法关闭该端口。这样能充分利用服务器资源,效率得到了很大提高。
3、AIO
AIO编程,在NIO基础之上引入了异步通道的概念。并提供异步文件和异步套接字通道的实现,从而在真正意义上实现了异步非阻塞,之前我们学过的NIO只是非阻塞而非异步。而AIO它不需要通过多路复用器对注册的通道的进行轮训操作即可实现异步读写,从而简化了NIO编程模型。也可以称为NIO2.0,这种模式才是真正的属于异步非阻塞的模型。

AIO不需要通过多路复用器对注册的通道进行轮询操作即可实现异步读写。什么意思呢?NIO采用轮询的方式,一直在轮询的询问stream中数据是否准备就绪,如果准备就绪发起处理。但是AIO就不需要了,AIO框架在windows下使用windows IOCP技术,在Linux下使用epoll多路复用IO技术模拟异步IO, 即:应用程序向操作系统注册IO监听,然后继续做自己的事情。操作系统发生IO事件,并且准备好数据后,在主动通知应用程序,触发相应的函数(这就是一种以订阅者模式进行的改造)。由于应用程序不是“轮询”方式而是订阅-通知方式,所以不再需要selector轮询,由channel通道直接到操作系统注册监听。
3.1、NIO(AIO)中几个概念
缓冲区 Buffer
NIO基于块进行数据处理,在NIO中所有数据的读取都是通过缓冲Buffer进行处理。
具体的缓存区有这些:ByteBuffe、CharBuffer、 ShortBuffer、IntBuffer、LongBuffer、FloatBuffer、DoubleBuffer。他们实现了相同的接口:Buffer。
通道 Channel
对数据的读取和写入要通过Channel通道。通道不同于流的地方就是通道是双向的,用于读、写和同时读写操作。底层的操作系统的通道一般都是全双工的,全双工的Channel比流能更好的映射底层操作系统的API。
多路复用器 Selector
Selector提供选择已经就绪的任务的能力:
Selector轮询注册在其上的Channel,如果某个Channel发生读写请求并且Channel就处于就绪状态,会被Selector轮询出来,然后通过SelectionKey可以获取就绪Channel的集合,进行后续的I/O操作。(同步)
一个Selector可以同时轮询多个Channel,因为JDK使用了epoll()代替传统的select实现,所以没有最大连接句柄1024/2048的限制。所以,只需要一个线程负责Selector的轮询,就可以接入成千上万的客户端。(非阻塞)。
3.2、NIO 和 AIO
NIO: 会等数据准备好后,再交由应用进行处理,数据的读取/写入过程依然在应用线程中完成,只是将等待的时间剥离到单独的线程中去,节省了数据准备时间,因为多路复用机制,Selector会得到复用,对于那些读写过程时间长的,NIO就不太适合。
AIO: 读完(内核内存拷贝到用户内存)了系统再通知应用,使用回调函数,进行业务处理,AIO能够胜任那些重量级,读写过程长的任务。
4、适用场景
- (1)BIO方式适用于连接数目比较小且固定的架构,这种方式对服务器资源要求比较高,并发局限于应用中,JDK1.4以前的唯一选择,但程序直观简单易理解。
- (2)NIO方式适用于连接数目多且连接比较短(轻操作)的架构,比如聊天服务器,并发局限于应用中,编程比较复杂,JDK1.4开始支持。
- (3)AIO方式使用于连接数目多且连接比较长(重操作)的架构,比如相册服务器,充分调用OS参与并发操作,编程比较复杂,JDK7开始支持。
另外,I/O属于底层操作,需要操作系统支持,并发也需要操作系统的支持,所以性能方面不同操作系统差异会比较明显。
5、各种 I/O 的对比
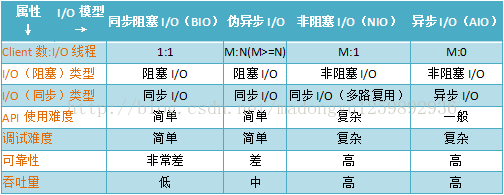
6、什么是同步阻塞、同步非阻塞、异步阻塞、异步非阻塞
举个栗子
-
1、你在家做饭,用普通的汤锅,米放进去,就站在锅边,傻等饭熟。——同步阻塞
是不是觉得浪费了大量的时间,于是你想提高时间的利用效率。 -
2、还是用普通的汤锅,米放进去,然后继续回去打游戏,过一会就来看一次。——同步非阻塞
时间的利用率稍微提升了一点点,还有没有办法再提升一点呢? -
3、你去某宝淘了个电饭锅,饭熟了会自动跳闸的那种。米放进去,然后傻傻的看它怎么做饭的。——异步阻塞
这有什么意义呢?完全没利用好电饭锅的优势啊 -
4、这回学聪明了,米放进去,按下按钮,然后就去打游戏了,等到跳闸的时候就去吃饭 。——异步非阻塞
这样是不是聪明了很多,时间的利用率大大提升。
相对于程序而言的 ,异步可以给你节省出更多的时间,让你去干别的事,同步只能由你自己主动去查看。
孰优孰劣不言而喻 。
阻塞和非阻塞,也很好理解。
同步阻塞,顺序执行,只能傻等,效率低下 。
同步非阻塞,稍微高明点,但是麻烦了很多,多做很多无用功。
异步阻塞,这个等于自断一臂,没啥大意义。
异步非阻塞,这才是异步的最佳用法。
7、NIO架构设计,由哪些组成(Java NIO 核心部分
)
- Channels 通道
- Buffers 缓冲区
- Selectors 选择器
基本上,所有的 IO 在NIO 中都从一个Channel 开始。Channel 有点象流。 数据可以从Channel读到Buffer中,也可以从Buffer 写到Channel中。这里有个图示:
7.1、Channel
Channel的实现: (涵盖了UDP 和 TCP 网络IO,以及文件IO)
FileChannel
DatagramChannel
SocketChannel
ServerSocketChannel
读数据:
int bytesRead = inChannel.read(buf);
写数据:
int bytesWritten = inChannel.write(buf);
还有部分的使用,如配置Channel为阻塞或者非阻塞模式,以及如何注册到Selector上面去,参考Selector部分;
7.2、Buffer
Buffer实现: (byte, char、short, int, long, float, double )
ByteBuffer
CharBuffer
DoubleBuffer
FloatBuffer
IntBuffer
LongBuffer
ShortBuffer
7.2.1、Buffer使用
读数据
flip()方法
将Buffer从写模式切换到读模式
调用flip()方法会将position设回0,并将limit设置成之前position的值。
buf.flip();
(char) buf.get()
读取数据
Buffer.rewind()
将position设回0,所以你可以重读Buffer中的所有数据
limit保持不变,仍然表示能从Buffer中读取多少个元素(byte、char等)
Buffer.mark()方法,可以标记Buffer中的一个特定position。之后可以通过调用
Buffer.reset()方法,恢复到Buffer.mark()标记时的position
一旦读完了所有的数据,就需要清空缓冲区,让它可以再次被写入。
clear()方法会:清空整个缓冲区。
position将被设回0,limit被设置成 capacity的值
compact()方法:
只会清除已经读过的数据;任何未读的数据都被移到缓冲区的起始处,新写入的数据将放到缓冲区未读数据的后面。
将position设到最后一个未读元素正后面,limit被设置成 capacity的值
写数据
buf.put(127);
7.2.2、Buffer的三个属性
- capacity:含义与模式无关;Buffer的一个固定的大小值;Buffer满了需要将其清空才能再写;
ByteBuffer.allocate(48);该buffer的capacity为48byte
CharBuffer.allocate(1024);该buffer的capacity为1024个char - position:含义取决于Buffer处在读模式还是写模式(初始值为0,写或者读操作的当前位置)
写数据时,初始的position值为0;其值最大可为capacity-1
将Buffer从写模式切换到读模式,position会被重置为0 - limit:含义取决于Buffer处在读模式还是写模式(写limit=capacity;读limit等于最多可以读取到的数据)
写模式下,limit等于Buffer的capacity
切换Buffer到读模式时, limit表示你最多能读到多少数据;
7.3、Selector
7.3.1、概述
Selector允许单线程处理多个 Channel。如果你的应用打开了多个连接(通道),但每个连接的流量都很低,使用Selector就会很方便。例如,在一个聊天服务器中。 要使用Selector,得向Selector注册Channel,然后调用它的select()方法。这个方法会一直阻塞到某个注册的通道有事件就绪。一旦这个方法返回,线程就可以处理这些事件,事件的例子有如新连接进来,数据接收等。
7.3.2、使用
创建:Selector selector = Selector.open();
注册通道:
channel.configureBlocking(false);
与Selector一起使用时,Channel必须处于非阻塞模式
这意味着不能将FileChannel与Selector一起使用,因为FileChannel不能切换到非阻塞模式(而套接字通道都可以)
SelectionKey key = channel.register(selector, Selectionkey.OP_READ);
第二个参数表明Selector监听Channel时对什么事件感兴趣
SelectionKey.OP_CONNECT SelectionKey.OP_ACCEPT SelectionKey.OP_READ SelectionKey.OP_WRITE
可以用或操作符将多个兴趣组合一起
SelectionKey
包含了interest集合 、ready集合 、Channel 、Selector 、附加的对象(可选)
int interestSet = key.interestOps();可以进行类似interestSet & SelectionKey.OP_CONNECT的判断
使用:
select():阻塞到至少有一个通道在你注册的事件上就绪了
selectNow():不会阻塞,不管什么通道就绪都立刻返回
selectedKeys():访问“已选择键集(selected key set)”中的就绪通道
close():使用完selector需要用其close()方法会关闭该Selector,且使注册到该Selector上的所有SelectionKey实例无效。
四、JVM
1、浅谈JVM的内存模型
java虚拟机在执行Java程序的过程中会把它所管理的内存划分为若干个不同的数据区域,这些数据区域可以分为两个部分:一部分是线程共享的,一部分则是线程私有的。其中,线程共享的数据区包括方法区和堆,线程私有的数据区包括虚拟机栈、本地方法栈和程序计数器。如下图所示:
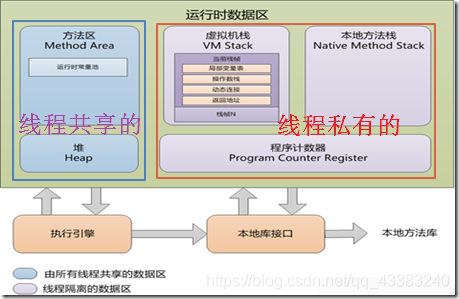
1.1、线程私有的数据区
线程私有的数据区 包括 程序计数器、 虚拟机栈 和 本地方法栈 三个区域,它们的内涵分别如下:
- 1)、程序计数器
我们知道,线程是CPU调度的基本单位。在多线程情况下,当线程数超过CPU数量或CPU内核数量时,线程之间就要根据 时间片轮询抢夺CPU时间资源。也就是说,在任何一个确定的时刻,一个处理器都只会执行一条线程中的指令。因此,为了线程切换后能够恢复到正确的执行位置,每条线程都需要一个独立的程序计数器去记录其正在执行的字节码指令地址。
因此,程序计数器是线程私有的一块较小的内存空间,其可以看做是当前线程所执行的字节码的行号指示器。如果线程正在执行的是一个 Java 方法,计数器记录的是正在执行的字节码指令的地址;如果正在执行的是 Native 方法,则计数器的值为空。
程序计数器是唯一一个没有规定任何 OutOfMemoryError 的区域。
- 2)、虚拟机栈
虚拟机栈描述的是Java方法执行的内存模型,是线程私有的。每个方法在执行的时候都会创建一个栈帧,用于存储局部变量表、操作数栈、动态链接、方法出口等信息,而且 每个方法从调用直至完成的过程,对应一个栈帧在虚拟机栈中入栈到出栈的过程。其中,局部变量表主要存放一些基本类型的变量(int, short, long, byte, float, double, boolean, char)和 对象句柄,它们可以是方法参数,也可以是方法的局部变量。
虚拟机栈有两种异常情况:StackOverflowError 和 OutOfMemoryError。我们知道,一个线程拥有一个自己的栈,这个栈的大小决定了方法调用的可达深度(递归多少层次,或嵌套调用多少层其他方法,-Xss 参数可以设置虚拟机栈大小),若线程请求的栈深度大于虚拟机允许的深度,则抛出 StackOverFlowError 异常。此外,栈的大小可以是固定的,也可以是动态扩展的,若虚拟机栈可以动态扩展(大多数虚拟机都可以),但扩展时无法申请到足够的内存(比如没有足够的内存为一个新创建的线程分配栈空间时),则抛出 OutofMemoryError 异常。下图为栈帧结构图:

- 3)、本地方法栈
本地方法栈与Java虚拟机栈非常相似,也是线程私有的,区别是虚拟机栈为虚拟机执行 Java 方法服务,而本地方法栈为虚拟机执行 Native 方法服务。与虚拟机栈一样,本地方法栈区域也会抛出 StackOverflowError 和 OutOfMemoryError 异常。
1.2、线程共享的数据区
线程共享的数据区 具体包括 Java堆 和 方法区 两个区域,它们的内涵分别如下:
- 1)、Java 堆
Java 堆的唯一目的就是存放对象实例,几乎所有的对象实例(和数组)都在这里分配内存。Java堆是线程共享的,类的对象从中分配空间,这些对象通过new、newarray、 anewarray 和 multianewarray 等指令建立,它们不需要程序代码来显式的释放。
由于Java堆唯一目的就是用来存放对象实例,因此其也是垃圾收集器管理的主要区域,故也称为称为 GC堆。从内存回收的角度看,由于现在的垃圾收集器基本都采用分代收集算法,所以为了方便垃圾回收Java堆还可以分为 新生代 和 老年代 。新生代用于存放刚创建的对象以及年轻的对象,如果对象一直没有被回收,生存得足够长,对象就会被移入老年代。新生代又可进一步细分为 eden、survivorSpace0 和 survivorSpace1。刚创建的对象都放入 eden,s0 和 s1 都至少经过一次GC并幸存。如果幸存对象经过一定时间仍存在,则进入老年代。更多关于Java堆和分代收集算法的介绍,请移步我的博文《Java 垃圾回收机制概述》。下图给出了Java堆的结构图:

注意,Java堆可以处于物理上不连续的内存空间中,只要逻辑上是连续的即可。而且,Java堆在实现时,既可以是固定大小的,也可以是可拓展的,并且主流虚拟机都是按可扩展来实现的(通过-Xmx(最大堆容量) 和 -Xms(最小堆容量)控制)。如果在堆中没有内存完成实例分配,并且堆也无法再拓展时,将会抛出 OutOfMemoryError 异常。
(1)、TLAB (Thread Local Allocation Buffer,线程私有分配缓冲区)
Sun Hotspot JVM 为了提升对象内存分配的效率,对于所创建的线程都会分配一块独立的空间 TLAB,其大小由JVM根据运行的情况计算而得。在TLAB上分配对象时不需要加锁(相对于CAS配上失败重试方式 ),因此JVM在给线程的对象分配内存时会尽量的在TLAB上分配,在这种情况下JVM中分配对象内存的性能和C基本是一样高效的,但如果对象过大的话则仍然是直接使用堆空间分配。
在下文中我们提到,虚拟机为新生对象分配内存时,需要考虑修改指针 (该指针用于划分内存使用空间和空闲空间) 时的线程安全问题,因为存在可能出现正在给对象A分配内存,指针还未修改,对象B又同时使用原来的指针分配内存的情况。TLAB 的存在就是为了解决这个问题:每个线程在Java堆中预先分配一小块内存 TLAB,哪个线程需要分配内存就在自己的TLAB上进行分配,若TLAB用完并分配新的TLAB时,再加同步锁定,这样就大大提升了对象内存分配的效率。
- 2)、方法区
方法区与Java堆一样,也是线程共享的并且不需要连续的内存,其用于存储已被虚拟机加载的 类信息、常量、静态变量、即时编译器编译后的代码等数据。方法区通常和永久区(Perm)关联在一起,但永久代与方法区不是一个概念,只是有的虚拟机用永久代来实现方法区,这样就可以用永久代GC来管理方法区,省去专门内存管理的工作。根据Java虚拟机规范的规定,当方法区无法满足内存分配的需求时,将抛出 OutOfMemoryError 异常。
(1)、运行时常量池
运行时常量池(Runtime Constant Pool)是方法区的一部分,用于存放编译期生成的各种 字面量 和 符号引用。其中,字面量比较接近Java语言层次的常量概念,如文本字符串、被声明为final的常量值等;而符号引用则属于编译原理方面的概念,包括以下三类常量:类和接口的全限定名、字段的名称和描述符 和 方法的名称和描述符。因为运行时常量池(Runtime Constant Pool)是方法区的一部分,那么当常量池无法再申请到内存时也会抛出 OutOfMemoryError 异常。
运行时常量池相对于Class文件常量池的一个重要特征是具备动态性。Java语言并不要求常量一定只有编译期才能产生,运行期间也可能将新的常量放入池中,比如字符串的手动入池方法intern()。
- 3)、Java堆 与 方法区的区别
Java堆是 Java代码可及的内存,是留给开发人员使用的;而非堆(Non-Heap)是JVM留给自己用的,所以方法区、JVM内部处理或优化所需的内存 (如JIT编译后的代码缓存)、每个类结构 (如运行时常量池、字段和方法数据)以及方法和构造方法的代码都在非堆内存中。
- 4)、方法区的回收
方法区的内存回收目标主要是针对 常量池的回收 和 对类型的卸载。回收废弃常量与回收Java堆中的对象非常类似。以常量池中字面量的回收为例,假如一个字符串“abc”已经进入了常量池中,但是当前系统没有任何一个String对象是叫做“abc”的,换句话说是没有任何String对象引用常量池中的“abc”常量,也没有其他地方引用了这个字面量,如果在这时候发生内存回收,而且必要的话,这个“abc”常量就会被系统“请”出常量池。常量池中的其他类(接口)、方法、字段的符号引用也与此类似。
判定一个常量是否是“废弃常量”比较简单,而要判定一个类是否是“无用的类”的条件则相对苛刻许多。类需要同时满足下面3个条件才能算是“无用的类”:
-
该类所有的实例都已经被回收,也就是Java堆中不存在该类的任何实例;
-
加载该类的ClassLoader已经被回收;
-
该类对应的 java.lang.Class 对象没有在任何地方被引用,无法在任何地方通过反射访问该类的方法。
虚拟机可以对满足上述3个条件的无用类进行回收(卸载),这里说的仅仅是“可以”,而不是和对象一样,不使用了就必然会回收。特别地,在大量使用反射、动态代理、CGLib等bytecode框架的场景,以及动态生成JSP和OSGi这类频繁自定义ClassLoader的场景都需要虚拟机具备类卸载的功能,以保证永久代不会溢出。
2、 jvm垃圾回收机制
在java中,程序员是不需要显示的去释放一个对象的内存的,而是由虚拟机自行执行。在JVM中,有一个垃圾回收线程,它是低优先级的,在正常情况下是不会执行的,只有在虚拟机空闲或者当前堆内存不足时,才会触发执行,扫描那些没有被任何引用的对象,并将它们添加到要回收的集合中,进行回收。
在探讨Java垃圾回收机制之前,我们首先应该记住一个单词:Stop-the-World。Stop-the-world意味着 JVM由于要执行GC而停止了应用程序的执行,并且这种情形会在任何一种GC算法中发生。当Stop-the-world发生时,除了GC所需的线程以外,所有线程都处于等待状态直到GC任务完成。事实上,GC优化很多时候就是指减少Stop-the-world发生的时间,从而使系统具有 高吞吐 、低停顿 的特点。
Ps: 内存泄露是指该内存空间使用完毕之后未回收,在不涉及复杂数据结构的一般情况下,Java 的内存泄露表现为一个内存对象的生命周期超出了程序需要它的时间长度。
2.1、如何确定一个对象是否可以被回收?
2.1.1、 引用计数算法:判断对象的引用数量
引用计数算法是通过判断对象的引用数量来决定对象是否可以被回收。
引用计数算法是垃圾收集器中的早期策略。在这种方法中,堆中的每个对象实例都有一个引用计数。当一个对象被创建时,且将该对象实例分配给一个引用变量,该对象实例的引用计数设置为 1。当任何其它变量被赋值为这个对象的引用时,对象实例的引用计数加 1(a = b,则b引用的对象实例的计数器加 1),但当一个对象实例的某个引用超过了生命周期或者被设置为一个新值时,对象实例的引用计数减 1。特别地,当一个对象实例被垃圾收集时,它引用的任何对象实例的引用计数器均减 1。 任何引用计数为0的对象实例可以被当作垃圾收集。
引用计数收集器可以很快的执行,并且交织在程序运行中,对程序需要不被长时间打断的实时环境比较有利,但其很难解决对象之间相互循环引用的问题。如下面的程序和示意图所示,对象objA和objB之间的引用计数永远不可能为 0,那么这两个对象就永远不能被回收。

public class ReferenceCountingGC {
public Object instance = null;
public static void testGC(){
ReferenceCountingGC objA = new ReferenceCountingGC ();
ReferenceCountingGC objB = new ReferenceCountingGC ();
// 对象之间相互循环引用,对象objA和objB之间的引用计数永远不可能为 0
objB.instance = objA;
objA.instance = objB;
objA = null;
objB = null;
System.gc();
}
}
上述代码最后面两句将objA和objB赋值为null,也就是说objA和objB指向的对象已经不可能再被访问,但是由于它们互相引用对方,导致它们的引用计数器都不为 0,那么垃圾收集器就永远不会回收它们。
2.1.2、 可达性分析算法:判断对象的引用链是否可达
可达性分析算法是通过判断对象的引用链是否可达来决定对象是否可以被回收。
可达性分析算法是从离散数学中的图论引入的,程序把所有的引用关系看作一张图,通过一系列的名为 “GC Roots” 的对象作为起始点,从这些节点开始向下搜索,搜索所走过的路径称为引用链(Reference Chain)。当一个对象到 GC Roots 没有任何引用链相连(用图论的话来说就是从 GC Roots 到这个对象不可达)时,则证明此对象是不可用的,如下图所示。在Java中,可作为 GC Root 的对象包括以下几种:
-
虚拟机栈(栈帧中的局部变量表)中引用的对象;
-
方法区中类静态属性引用的对象;
-
方法区中常量引用的对象;
-
本地方法栈中Native方法引用的对象;

2.2、垃圾收集算法
2.2.1、标记清除算法
标记-清除算法分为标记和清除两个阶段。该算法首先从根集合进行扫描,对存活的对象对象标记,标记完毕后,再扫描整个空间中未被标记的对象并进行回收,如下图所示。
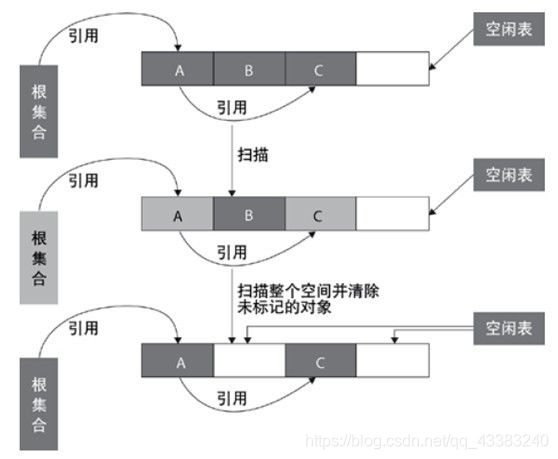
标记-清除算法的主要不足有两个:
-
效率问题:标记和清除两个过程的效率都不高;
-
空间问题:标记-清除算法不需要进行对象的移动,并且仅对不存活的对象进行处理,因此标记清除之后会产生大量不连续的内存碎片,空间碎片太多可能会导致以后在程序运行过程中需要分配较大对象时,无法找到足够的连续内存而不得不提前触发另一次垃圾收集动作。

2.2.2、复制算法
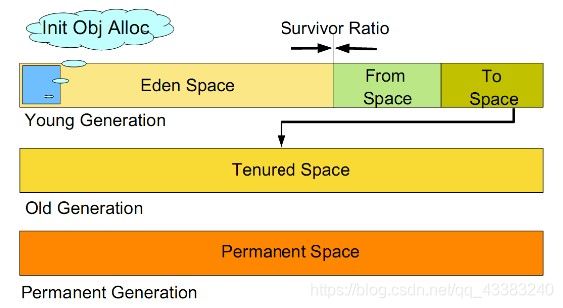
复制算法将可用内存按容量划分为大小相等的两块,每次只使用其中的一块。当这一块的内存用完了,就将还存活着的对象复制到另外一块上面,然后再把已使用过的内存空间一次清理掉。这种算法适用于对象存活率低的场景,比如新生代。这样使得每次都是对整个半区进行内存回收,内存分配时也就不用考虑内存碎片等复杂情况,只要移动堆顶指针,按顺序分配内存即可,实现简单,运行高效。该算法示意图如下所示:

事实上,现在商用的虚拟机都采用这种算法来回收新生代。因为研究发现,新生代中的对象每次回收都基本上只有10%左右的对象存活,所以需要复制的对象很少,效率还不错。正如在博文《JVM 内存模型概述》中介绍的那样,实践中会将新生代内存分为一块较大的Eden空间和两块较小的Survivor空间 (如下图所示),每次使用Eden和其中一块Survivor。当回收时,将Eden和Survivor中还存活着的对象一次地复制到另外一块Survivor空间上,最后清理掉Eden和刚才用过的Survivor空间。HotSpot虚拟机默认Eden和Survivor的大小比例是 8:1,也就是每次新生代中可用内存空间为整个新生代容量的90% ( 80%+10% ),只有10% 的内存会被“浪费”。
2.2.3、标记整理算法
复制收集算法在对象存活率较高时就要进行较多的复制操作,效率将会变低。更关键的是,如果不想浪费50%的空间,就需要有额外的空间进行分配担保,以应对被使用的内存中所有对象都100%存活的极端情况,所以在老年代一般不能直接选用这种算法。标记整理算法的标记过程类似标记清除算法,但后续步骤不是直接对可回收对象进行清理,而是让所有存活的对象都向一端移动,然后直接清理掉端边界以外的内存,类似于磁盘整理的过程,该垃圾回收算法适用于对象存活率高的场景(老年代),其作用原理如下图所示。

标记整理算法与标记清除算法最显著的区别是:标记清除算法不进行对象的移动,并且仅对不存活的对象进行处理;而标记整理算法会将所有的存活对象移动到一端,并对不存活对象进行处理,因此其不会产生内存碎片。标记整理算法的作用示意图如下:

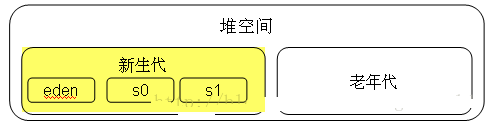
2.2.4、分代收集算法
对于一个大型的系统,当创建的对象和方法变量比较多时,堆内存中的对象也会比较多,如果逐一分析对象是否该回收,那么势必造成效率低下。分代收集算法是基于这样一个事实:不同的对象的生命周期(存活情况)是不一样的,而不同生命周期的对象位于堆中不同的区域,因此对堆内存不同区域采用不同的策略进行回收可以提高 JVM 的执行效率。当代商用虚拟机使用的都是分代收集算法:新生代对象存活率低,就采用复制算法;老年代存活率高,就用标记清除算法或者标记整理算法。Java堆内存一般可以分为新生代、老年代和永久代三个模块,如下图所示:
1). 新生代(Young Generation)
新生代的目标就是尽可能快速的收集掉那些生命周期短的对象,一般情况下,所有新生成的对象首先都是放在新生代的。新生代内存按照 8:1:1 的比例分为一个eden区和两个survivor(survivor0,survivor1)区,大部分对象在Eden区中生成。在进行垃圾回收时,先将eden区存活对象复制到survivor0区,然后清空eden区,当这个survivor0区也满了时,则将eden区和survivor0区存活对象复制到survivor1区,然后清空eden和这个survivor0区,此时survivor0区是空的,然后交换survivor0区和survivor1区的角色(即下次垃圾回收时会扫描Eden区和survivor1区),即保持survivor0区为空,如此往复。特别地,当survivor1区也不足以存放eden区和survivor0区的存活对象时,就将存活对象直接存放到老年代。如果老年代也满了,就会触发一次FullGC,也就是新生代、老年代都进行回收。注意,新生代发生的GC也叫做MinorGC,MinorGC发生频率比较高,不一定等 Eden区满了才触发。
2). 老年代(Old Generation)
老年代存放的都是一些生命周期较长的对象,就像上面所叙述的那样,在新生代中经历了N次垃圾回收后仍然存活的对象就会被放到老年代中。此外,老年代的内存也比新生代大很多(大概比例是1:2),当老年代满时会触发Major GC(Full GC),老年代对象存活时间比较长,因此FullGC发生的频率比较低。
3). 永久代(Permanent Generation)
永久代主要用于存放静态文件,如Java类、方法等。永久代对垃圾回收没有显著影响,但是有些应用可能动态生成或者调用一些class,例如使用反射、动态代理、CGLib等bytecode框架时,在这种时候需要设置一个比较大的永久代空间来存放这些运行过程中新增的类。
2.2.5、小结

由于对象进行了分代处理,因此垃圾回收区域、时间也不一样。垃圾回收有两种类型,Minor GC 和 Full GC。
-
Minor GC:对新生代进行回收,不会影响到年老代。因为新生代的 Java 对象大多死亡频繁,所以 Minor GC 非常频繁,一般在这里使用速度快、效率高的算法,使垃圾回收能尽快完成。
-
Full GC: 也叫 Major GC,对整个堆进行回收,包括新生代和老年代。由于Full GC需要对整个堆进行回收,所以比Minor GC要慢,因此应该尽可能减少Full GC的次数,导致Full GC的原因包括:老年代被写满、永久代(Perm)被写满和System.gc()被显式调用等。
2.3、垃圾收集器
如果说垃圾收集算法是内存回收的方法论,那么垃圾收集器就是内存回收的具体实现。下图展示了7种作用于不同分代的收集器,其中用于回收新生代的收集器包括Serial、PraNew、Parallel Scavenge,回收老年代的收集器包括Serial Old、Parallel Old、CMS,还有用于回收整个Java堆的G1收集器。不同收集器之间的连线表示它们可以搭配使用。

-
Serial收集器(复制算法): 新生代单线程收集器,标记和清理都是单线程,优点是简单高效;
-
Serial Old收集器 (标记-整理算法): 老年代单线程收集器,Serial收集器的老年代版本;
-
ParNew收集器 (复制算法): 新生代收并行集器,实际上是Serial收集器的多线程版本,在多核CPU环境下有着比Serial更好的表现;
-
Parallel Scavenge收集器 (复制算法): 新生代并行收集器,追求高吞吐量,高效利用 CPU。吞吐量 = 用户线程时间/(用户线程时间+GC线程时间),高吞吐量可以高效率的利用CPU时间,尽快完成程序的运算任务,适合后台应用等对交互相应要求不高的场景;
-
Parallel Old收集器 (标记-整理算法): 老年代并行收集器,吞吐量优先,Parallel Scavenge收集器的老年代版本;
-
CMS(Concurrent Mark Sweep)收集器(标记-清除算法): 老年代并行收集器,以获取最短回收停顿时间为目标的收集器,具有高并发、低停顿的特点,追求最短GC回收停顿时间。
-
G1(Garbage First)收集器 (标记-整理算法): Java堆并行收集器,G1收集器是JDK1.7提供的一个新收集器,G1收集器基于“标记-整理”算法实现,也就是说不会产生内存碎片。此外,G1收集器不同于之前的收集器的一个重要特点是:G1回收的范围是整个Java堆(包括新生代,老年代),而前六种收集器回收的范围仅限于新生代或老年代。
2.4、内存分配与回收策略
Java技术体系中所提倡的自动内存管理最终可以归结为自动化地解决了两个问题:给对象分配内存 以及 回收分配给对象的内存。一般而言,对象主要分配在新生代的Eden区上,如果启动了本地线程分配缓存(TLAB),将按线程优先在TLAB上分配。少数情况下也可能直接分配在老年代中。总的来说,内存分配规则并不是一层不变的,其细节取决于当前使用的是哪一种垃圾收集器组合,还有虚拟机中与内存相关的参数的设置。
-
1)对象优先在Eden分配,当Eden区没有足够空间进行分配时,虚拟机将发起一次MinorGC。现在的商业虚拟机一般都采用复制算法来回收新生代,将内存分为一块较大的Eden空间和两块较小的Survivor空间,每次使用Eden和其中一块Survivor。 当进行垃圾回收时,将Eden和Survivor中还存活的对象一次性地复制到另外一块Survivor空间上,最后处理掉Eden和刚才的Survivor空间。(HotSpot虚拟机默认Eden和Survivor的大小比例是8:1)当Survivor空间不够用时,需要依赖老年代进行分配担保。
-
2)大对象直接进入老年代。所谓的大对象是指,需要大量连续内存空间的Java对象,最典型的大对象就是那种很长的字符串以及数组。
-
3)长期存活的对象将进入老年代。当对象在新生代中经历过一定次数(默认为15)的Minor GC后,就会被晋升到老年代中。
-
4)动态对象年龄判定。为了更好地适应不同程序的内存状况,虚拟机并不是永远地要求对象年龄必须达到了MaxTenuringThreshold才能晋升老年代,如果在Survivor空间中相同年龄所有对象大小的总和大于Survivor空间的一半,年龄大于或等于该年龄的对象就可以直接进入老年代,无须等到MaxTenuringThreshold中要求的年龄。
需要注意的是,Java的垃圾回收机制是Java虚拟机提供的能力,用于在空闲时间以不定时的方式动态回收无任何引用的对象占据的内存空间。也就是说,垃圾收集器回收的是无任何引用的对象占据的内存空间而不是对象本身。