夜深人静写算法(十)- 单向广搜
文章目录
- 一、前言
- 二、单向广搜简介
- 三、先进先出队列
-
- 1、队列的基础结构
- 2、队列的数据元素
- 3、队列的接口
-
- 1)清空队列
- 2)压入数据
- 3)弹出数据
- 4)队列判空
- 4、队列的容错机制
-
- 1)循环队列
- 2)动态扩容
- 四、单向广搜的原理
-
- 1、状态的概念
-
- 1)状态
- 2)状态转移
- 3)初始状态 和 结束状态
- 4)状态哈希
- 2、状态的程序描述
-
- 1)结构体定义
- 2)接口定义
- 3、状态的降维
- 4、单向广搜的实现
-
- 1)广搜算法描述
- 2)广搜算法框架
- 3)广搜算法初始化
- 4)广搜算法的状态扩展
- 五、单向广搜的应用场景
-
- 1、迷宫问题
-
- 1)双人迷宫
- 2)推箱子
- 3)右转迷宫
- 4)收集物品
- 5)贪吃蛇
- 2、同余搜索
- 3、预处理
- 六、单向广搜题集整理
一、前言
掌握了广搜就意味着至少可以拿一块省赛银牌,这或许是一句玩笑话,但是我觉得还是有几分道理的,广搜的涉及面很广,而且可以辅助你更好得理解动态规划,因为两者都有状态的概念,而且广搜的状态更加容易构造,不学广搜就无法理解 A*、SPFA、差分约束、稳定婚姻、最大流 等等其它的图论算法。
回想自己十几年前刚开始学习搜索的时候,总是分不清楚什么时候应该用广搜,什么时候应该用深搜,所以,我把之前遇到的问题做了一个总结,发现最重要的还是那两个字:状态。今天这篇文章会围绕这两个字进行一个非常详细的讲解。
当然,任何事情都有一个循序渐进的过程,我不会把所有关于广搜的内容一次性讲完,看完这篇文章,你至少应该可以自己手写一个单向广搜的代码。后面的章节会对 最短路、A* 、双向广搜 逐一进行讲解。

二、单向广搜简介
- 单向广搜就是最简化情况下的广度优先搜索(Breadth First Search),以下简称为广搜。游戏开发过程中用到的比较广泛的 A* 寻路,就是广搜的加强版。
- 那么,我们通过一个例子来初步了解下广搜的搜索过程。
【例题1】公主被关在一个 n × m ( n , m < = 500 ) n \times m(n,m <= 500) n×m(n,m<=500) 的迷宫里,主公想在最快的时间内救出公主。但是迷宫太大,而且有各种墙阻挡,主公每次只能在 上、下、左、右 四个方向内选择周围的非墙体格子前进一格,并且花费 1 单位时间,问主公救出公主的最少时间。
图二-1 (图中 ♂ 代表主公,♀代表公主,□ 代表墙体不能通行)

- 这个问题就是经典的用广度优先搜索来解决的问题。
- 我们通过一个动图来对广搜有一个初步的印象,如图二-2所示:

图二-2 - 从图中可以看出,广搜的本质还是暴力枚举。即对于每个当前位置,枚举四个相邻可以行走的方向进行不断尝试,直到找到目的地。有点像洪水爆发,从一个源头开始逐渐蔓延开来,直到所有可达的区域都被洪水灌溉,所以我们也把这种算法称为 FloodFill。
- 那么,如何把它描述成程序的语言呢?这里需要用到一种数据结构 —— 队列。本文接下来会对这种数据结构进行一个详细的讲解,如果读者对队列已经耳熟能详,那么可以跳过第三节,直接进入第四节。
三、先进先出队列
- 常见的队列有:先进先出队列、优先队列、单调队列 等等。本章将主要介绍 先进先出队列。
- 数据结构中的先进先出队列就好比我们日常工作中去食堂排队吃饭,排在前面的先取到饭。而 “先进先出” 就是 “先到先得” ,“近水楼台先得月” 的意思。读者可以从任何一本数据结构的书籍上看到这么一个词汇 FIFO,它就是先进先出(First Input First Output)的简称。
- 为了方便读者阅读,接下来一律将 先进先出队列 简称为 队列。
1、队列的基础结构
-
队列的基础结构是一种线性表,所以实现方式主要有两种:链表 和 数组。并且需要两个指针,分别指向队列头 f r o n t front front 和队列尾 r e a r rear rear。
-
链表结构的队列如下:
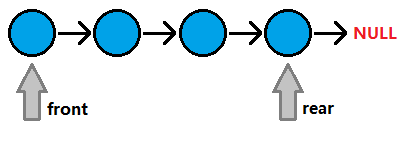
图三-1-1 -
数组结构的队列如下:
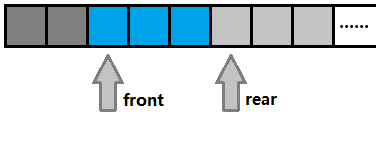
图三-1-2 -
那么接下来,请忘记链表。
-
作者将介绍一种用数组的方式来实现的队列,结构定义如下:
class Queue {
public:
Queue();
virtual ~Queue();
public:
...
private:
QueueData *data_;
int front_, rear_;
};
- 1)
QueueData *data_:虽然是个指针,但是它不是链表,这个指针指向的是队列数据的内存首地址,由于队列数组较大,所以采用堆内存,在队列类的构造函数里进行内存申请,析构函数里进行内存释放,代码如下:
const int MAXQUEUE = 1000000;
Queue::Queue() : data_(NULL) {
data_ = new QueueData[MAXQUEUE];
}
Queue::~Queue() {
if (data_) {
delete[] data_;
data_ = NULL;
}
}
- 2)
front_代表了队列头数据的索引,是一个数组下标,所以是整数类型,当队列不为空的时候,data_[front_]获取到的就是队首元素; - 3)
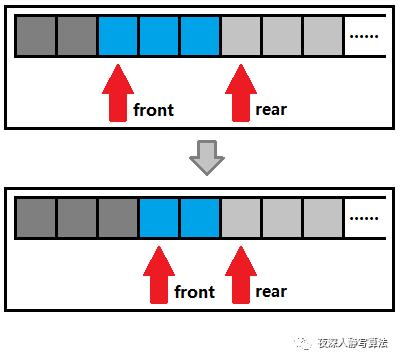
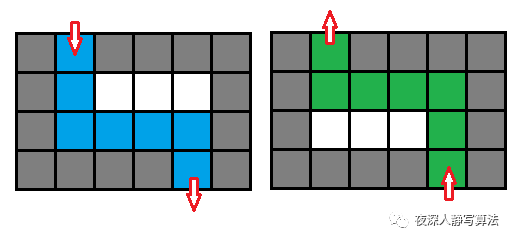
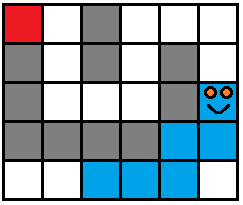
rear_代表了队列尾,也是一个数组下标,和队列首不同,它指向的是一个无用位置(空结点),当队列不为空的时候,队列尾部最后一个可用数据为data_[rear_-1],如图三-1-3所示:
- 图中深灰色代表已经弹出的数据,蓝色代表队列内的数据,浅灰色代表尚未使用的数据;
2、队列的数据元素
- 队列的数据元素一般是一个结构体(或者类),即上文提到的
QueueData,这样就可以根据不同需求定义不同的数据类型。 - 这个结构体的成员变量可以只有一个整数,代表 身高、年龄;
struct QueueData {
int height;
};
struct QueueData {
int age;
};
- 也可以是两个整数,代表 二维空间的坐标位置、一个矩形的宽和高 等等;
struct QueueData {
int x, y;
};
struct QueueData {
int width, height;
};
- 也可以是三个整数,代表 三维空间的位置、亦或是二维空间的位置加上方向等等。
struct QueueData {
int x, y, z;
};
struct QueueData {
int x, y, dir;
};
3、队列的接口
- 队列的操作接口一共有三种:清空队列、压入数据、弹出数据;
- 队列的判定接口只有一个:判空;
class Queue {
...
public:
void clear(); // 1)清空队列
void push(const QueueData& bs); // 2)压入数据
QueueData& pop(); // 3)弹出数据
public:
bool empty() const; // 4)队列是否为空
private:
...
};
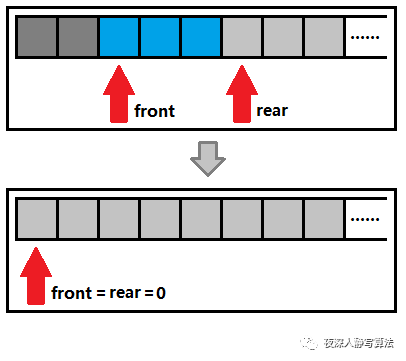
1)清空队列
- 清空队列不实际进行内存释放,而只是将队列头和队列尾下标索引置零,如下:
void Queue::clear() {
front_ = rear_ = 0;
}
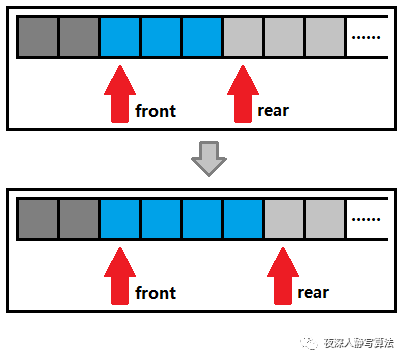
2)压入数据
- 压入数据的过程是将传入的数据结构体拷贝到队列尾指向的内存上,然后再将队列尾指针下标自增 1,时间复杂度 O ( 1 ) O(1) O(1)。
void Queue::push(const QueueData& bs) {
data_[rear_++] = bs;
}
3)弹出数据
- 弹出数据的过程是将队列头的数据的结构体引用直接返回给调用方,然后队列头指针下标自增 1,时间复杂度 O ( 1 ) O(1) O(1)。
QueueData& Queue::pop(){
return data_[front_++];
}
4)队列判空
- 队列的判定接口只有一个:判空;
- 只需要判断 队列头索引 和 队列尾索引 是否相同即可;
bool Queue::empty() const {
return front_ == rear_;
}
4、队列的容错机制
- 上文在实现队列的时候,为了尽量简化代码,做了一些偷懒,所以是存在问题的,主要有两个:
- 1)队列为空的时候,进行弹出数据操作,得到的是一个未知的元素,是上一次残留的缓存数据,所以调用方在使用队列接口的时候需要进行先判空,再弹出的操作;
- 2)当队列数据超出了给定最大元素
MAXQUEUE时,压入数据会导致数组下标越界,有两个解决方案: -
- a. 循环队列;
-
- b. 动态扩容;
1)循环队列
- 我们发现,当弹出数据后,
data_[0, front_ - 1]这块内存的数据再也没有被用到,所以是可以被重复利用的,具体做法是: - a)当压入数据后,使得队列尾指针等于
MAXQUEUE时,则队列尾指针置0;修改后的push接口,代码实现如下:
void Queue::push(const QueueData& bs) {
data_[rear_++] = bs;
if (rear_ == MAXQUEUE) rear_ = 0;
}
- b)当弹出数据后,使得队列头指针等于
MAXQUEUE时,则队列头指针置0;修改后的pop接口,代码实现如下:
QueueData& Queue::pop(){
if (++front_ == MAXQUEUE) front_ = 0;
if (front_ == 0)
return data_[MAXQUEUE - 1];
else
return data_[front_ - 1];
}
- 但是,这样做存在一个问题,一旦压入数据的速度大于弹出数据的速度,并且队列中有效数据的个数大于
MAXQUEUE时,原有的数据会被下一次压入的数据覆盖掉,破坏原有内存结构,这个时候,循环队列已经不能解决问题,需要进行动态扩容了;
2)动态扩容
- 试想一下,对于一个循环队列,当
rear_ + 1 == front_时,再压入一个元素,就会导致rear_ == front_,队列就会变成空(参考上文的判空),这样就不能进行数据的弹出,导致队列不能正常运作,即使再压入数据,此时弹出的数据也不再是正确的,所以当队列剩余容量小于一定阈值的时候,我们需要把队列进行扩容处理; - 队列剩余容量 T 的计算分两种情况:
- 当
front_ <= rear_时,T = MAXQUEUE - (rear_ - front_); - 当
front_ > rear_时,T = front_ - rear_; - 那么我们可以考虑,当
T < MAXQUEUE * 0.1时,开辟一块新的内存,内存大小为MAXQUEUE*2,将原有内存拷贝过去,并且修改front_和rear_的值,然后再释放原有内存空间。 - 由于实际应用中,队列被用在网络消息的生产消费,基于多线程问题考虑,一般是需要加锁的,以上实现的是一个多线程不安全队列,关于加锁的内容不在本文讨论范围内。
- 以上就是有关队列的所有内容。
四、单向广搜的原理
- 为了更好的理解广搜的运作过程,我们需要先理解状态的概念。
1、状态的概念
1)状态
- 如果是计算机专业的同学,勉强上过几天编译原理的课,那么应该会对 有限状态自动机 这个词有点印象,没错,我们要说的状态就是它了。当然,为了照顾好逃课的同学,作者不会把书上的概念直接抄过来讲,毕竟那个太过于抽象,继续往下看,相信读者会对状态这个词有一个更加深入的理解。
2)状态转移
- 从一个状态到达另一个状态,这种转换的过程被称为状态转移。

- 举个具体的例子,你现在的位置是 (1,3),经过一步到达 (1, 4),我们可以把 (1,3) 这个位置编号为 0,(1, 4) 这个位置编号为 1,那么可以称为你从 状态 0 到达了 状态 1,表示成 ( 1 , 3 ) → ( 1 , 4 ) (1, 3) \to (1, 4) (1,3)→(1,4) 或者 0 → 1 0 \to 1 0→1。
- 状态不仅仅可以表示位置,比如现在你的位置在 (1, 3) ,方向为向左,经过一次右转,位置不变但是方向变成了向上,这也是一种状态转移,即 ( 1 , 3 , l e f t ) → ( 1 , 4 , u p ) (1, 3, left) \to (1, 4, up) (1,3,left)→(1,4,up)。
- 从一个状态到达另一个状态的时候会有消耗,可以是 时间、精力、步数 等等。
3)初始状态 和 结束状态
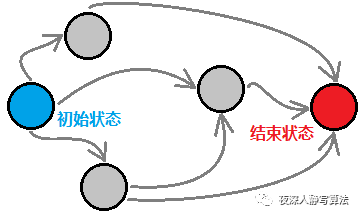
- 单向广搜的过程就是从 初始状态 通过穷举所有情况 最终到达 结束状态 的过程。而我们一般需要求的就是从 初始状态 到达 结束状态的最少时间(步数)。如图四-1-2描述的就是一个从初始状态经过一些中间状态,到达结束状态的过程。
4)状态哈希
- 之前的章节已经学过哈希表,哈希表的目的是标记重复,这里的状态也是一样的道理。
- 因为在广搜的图上,有可能形成环,这样就会导致本来已经搜索到过的状态,被再次访问,而再次访问同一个状态是没有意义的,所以需要对访问过的状态进行标记,这就是状态哈希。
2、状态的程序描述
1)结构体定义
- 以【例题1】为例,我们需要的状态是一个二维坐标,即 主公 的位置。我们定义一个二维坐标来作为状态,于是可以把状态定义如下结构体
BFSState:
struct Pos {
int x, y;
bool isInBound() {
return !(x < 0 || y < 0 || x >= XMAX || y >= YMAX);
}
bool isObstacle() {
return (Map[x][y] == MAP_BLOCK);
}
};
struct BFSState {
Pos p;
...
};
2)接口定义
- 状态的接口定义如下,先给出代码再进行讲解:
const int MAXSTATE = 1000000;
struct BFSState {
...
public:
inline bool isValidState(); // 1)
inline bool isFinalState(); // 2)
inline int getStep() const;
inline void setStep(int step);
protected:
int getStateKey() const;
public:
static int step[MAXSTATE]; // 3)
};
- 1)任何一个状态,都需要判断其合法性,比如对于迷宫来说,走出边界或者走到墙上都是非法状态,这个判定就是用
isValidState接口来完成的,实现可以是这样的:
bool BFSState::isValidState() {
return p.isInBound() && !p.isObstacle();
}
- 当然,对于不同的问题,可以对这个接口进行重载;
- 2)当遇到结束状态的时候,我们需要停止搜索过程,所以就需要对一个状态进行判定,比如地图上公主的位置标识为
MAP_EXIT,那么就判断这个状态下的位置所在的地图格子是否是MAP_EXIT,实现如下:
bool BFSState::isFinalState() {
return (Map[p.x][p.y] == MAP_EXIT);
}
- 3)
getStep是用来获取初始状态到当前状态的最小步数,setStep是用来设置初始状态到当前状态的最小步数,因为实际情况的状态所对应的维数是不确定的,有的是一维,有的是二维,三维、四维、甚至更高维度的。为了将问题统一,我们需要做一层映射,即 多维状态向量 转换成 一维状态向量,这个转换的过程见下一节:状态的降维; - 这里只需要知道
getStateKey()获取的就是降维以后一维的状态编号,那么我们可以定义所有状态最小步数的存储结构为一维数组,即static int step[MAXSTATE];,设置和获取的接口定义如下:
int BFSState::getStep() const {
return step[getStateKey()];
}
void BFSState::setStep(int sp) {
step[getStateKey()] = sp;
}
3、状态的降维
- 对于状态,最后聊一下状态的降维;
- 1)K 进制:取一个相对较大的数字(所有状态的所有维度下都不会遇到的数字)定义为 K,然后按照一定的顺序将所有维度排列好,组织成一个 K 进制数,例如对于二维的情况,降维后的状态值 s t a t e state state 就是: s t a t e = x ∗ K 1 + y ∗ K 0 state = x * K^1 + y * K^0 state=x∗K1+y∗K0
- 对应的代码实现如下:
int BFSState::getStateKey() const {
return (p.x * K) + p.y;
}
- 2)位运算优化:如果找到一个 K 是 2 的幂,我们就可以采用位或和左移来优化这里的乘法了,例如: K = 2 6 K=2^6 K=26,则: s t a t e = x < < 6 ∣ y state = x << 6 | y state=x<<6∣y
- 对应的代码实现如下:
int BFSState::getStateKey() const {
return p.x << 6 | p.y;
}
- 即 y y y 占了二进制的低 6 位, x x x 占了二进制的高 6 位。
- 3)映射预处理:当然还可以通过预处理的方式预先将所有的状态预先进行一一映射,如下代码代表的是将
pos2State这个全局数组代表的二维状态转换成一维状态:
int stateId = 0;
for (int i = 0; i < K; ++i)
for (int j = 0; j < K; j++)
pos2State[i][j] = stateId++;
- 对应的代码实现如下:
int BFSState::getStateKey() const {
return pos2State[p.x][p.y];
}
- 效率上来讲:映射预处理 > 位运算 > 乘法 ( > 代表优于);
4、单向广搜的实现
- 如果对上面的状态相关的描述都已经理解了,那么单向广搜的内容基本也就清晰了,接下来我们来看下如何用队列来实现单向广搜。
1)广搜算法描述
单向广搜的算法大致可以描述如下:
1)初始化所有状态的步数为无穷大,并且清空队列;
2)将 起始状态 放进队列,标记 起始状态 对应步数为 0;
3)如果队列不为空,弹出一个队列首元素,如果是 结束状态,则返回 结束状态 对应步数;否则根据这个状态扩展状态继续压入队列;
4)如果队列为空,说明没有找到需要找的 结束状态,返回无穷大;
2)广搜算法框架
- 定义广搜图的接口如下:
class BFSGraph {
public:
int bfs(BFSState startState);
private:
void bfs_extendstate(const BFSState& fromState);
void bfs_initialize(BFSState startState);
private:
Queue queue_;
};
- 其中
bfs作为一个框架接口供外部调用,基本是不变的,实现如下:
const int inf = -1;
int BFSGraph::bfs(BFSState startState) {
bfs_initialize(startState); // 1)
while (!queue_.empty()) {
BFSState bs = queue_.pop();
if (bs.isFinalState()) {
// 2)
return bs.getStep();
}
bfs_extendstate(bs); // 3)
}
return inf;
}
- 1)初始化整个广搜的路径图,确保每个状态都是未访问状态;
- 2)如果队列不为空,则不断弹出队列中的首元素,如果是结束状态则直接返回状态对应的步数;
- 3)如果不是结束状态,对它进行状态扩展,扩展方式调用接口
bfs_extendstate,不同问题的扩展方式不同,下文会对不同问题的状态扩展进行讲解。
3)广搜算法初始化
- 对于广搜的初始化,调用
bfs_initialize(startState)接口,主要做 4 件事情: - 1)初始化所有状态为未访问状态;
- 2)清空队列;
- 3)设置 初始状态 的 步数为 0;
- 4)将 初始状态压入队列;
- 代码实现如下:
const int inf = -1;
void BFSGraph::bfs_initialize(BFSState startState) {
memset(BFSState::step, inf, sizeof(BFSState::step));
queue_.clear();
startState.setStep(0);
queue_.push(startState);
}
4)广搜算法的状态扩展
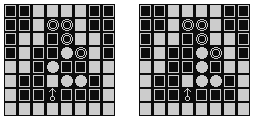
- 广搜的状态扩展比较多样化,这里介绍一种四方向迷宫类的问题的扩展方式,如图四-4-1所示:
- 首先需要定义四个方向常量,如下:
const int dir[DIR_COUNT][2] = {
{
1, 0 }, // 下
{
0, 1 }, // 右
{
0, -1 }, // 左
{
-1, 0 } // 上
};
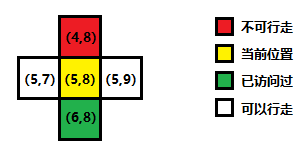
- 当前位置为 (5, 8),除了一个不可行走的墙体 (4, 8) ,已经访问过的 (6, 8) 以外,其它两个格子是可以被访问的,那么将它们加入队列,则状态扩展完毕后,队列中的数据如图四-4-2所示:

- (5, 8) 是当前位置,已经弹出队列,(5, 9) 和 (5, 7) 按照枚举方向的顺序,加入队列中;
- 对于四方向迷宫类问题的状态扩展的代码实现如下:
void BFSGraph::bfs_extendstate(const BFSState& fromState) {
int stp = fromState.getStep() + 1; // 1)
BFSState toState;
for (int i = 0; i < DIR_COUNT; ++i) {
toState.p = fromState.p.move(i); // 2)
if (!toState.isValidState() || toState.getStep() != inf) {
continue; // 3)
}
toState.setStep(stp); // 4)
queue_.push(toState);
}
}
- 1)本文介绍的广搜都是任意两个状态之间权值相同的情况,权值不同的情况需要用到 SPFA 算法来求最短路,会在后续的章节中继续展开,所以这种问题下两个状态之间的步数为 1(即权值)。
- 2)扩展状态的时候,从前一个状态经过某个方向走了一步,用
move来实现,我们可以对Pos结构体进行一个扩展,如下:
struct Pos {
...
Pos move(int dirIndex) const {
return Pos(x + dir[dirIndex][0], y + dir[dirIndex][1]);
}
};
- 其中
dir[][]代表的是一个方向向量,用于实现move接口的向量相加; - 3)当判断到达的状态是一个非法状态(图四-4-1中的红色方块)、或者曾经已经访问过(图四-4-1中的绿色方块)的话,则不进行压队操作,继续下一个方向的扩展;
- 4)否则,表明当前扩展状态是合法状态(图四-4-1中的白色方块),标记访问步数,将扩展的状态压入队列;
五、单向广搜的应用场景
1、迷宫问题
1)双人迷宫
【例题2】给定一个 n × m ( n , m < = 20 ) n \times m (n,m <= 20) n×m(n,m<=20) 的迷宫,有些格子是墙体不能进入,迷宫中有一个 主公 和 一位 公主,主公每次可以选择上、下、左、右四个方向进行移动,每次主公移动的同时,公主可以按照相反方向移动一格(如果没有墙体遮挡的话)。当主公和公主相邻或者进入同一个格子则算游戏结束,问至少多少步能让游戏结束。
- 这个问题和【例题1】的区别就是公主变成了动态的,而且是跟随主公的脚步进行移动,所以在设计状态的时候需要考虑公主的状态。所有动态的对象都应该被设计到状态里,所以这个问题的状态就是 主公 和 公主 两个人的位置。
- 设计状态如下:
struct BFSState {
Pos p[2];
...
};
- 其中 p [ 0 ] p[0] p[0] 代表主公的位置, p [ 1 ] p[1] p[1] 代表公主的位置。结束状态是两个人坐标的曼哈顿距离小于等于 1,即:
bool BFSState::isFinalState() {
return abs(p[0].x - p[1].x) + abs(p[0].y - p[1].y) <= 1;
}
- 然后只需要枚举主公的四方向进行广搜就行了。
2)推箱子
【例题3】给定一个 n × m ( n , m < = 8 ) n \times m (n,m <= 8) n×m(n,m<=8) 的迷宫,上面有 x ( x < = 4 ) x(x <= 4) x(x<=4) 个箱子 和 1个人,以及一些障碍和箱子需要放置的最终位置,求一种方案,用最少步数将所有的箱子推到指定位置。
图五-1-1
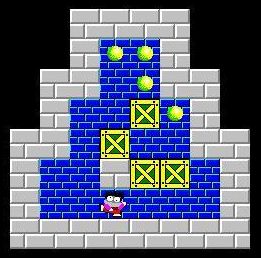
- 图五-1-2 是我们最重要实现的效果:
图五-1-2 - 算法的焦点一定在这个 “小人” 身上,但是光用 “小人” 的位置来表示状态肯定是不够的;
- 如图五-1-3所示,两个地图关卡的小人的位置是相同的,但是不能作为同一种情况来考虑,因为箱子的位置不同,所以最终状态表示也不同。根据【例题2】的经验,所有动态的对象都应该被设计到状态里。
图五-1-3 - 所以应该拿 小人 和 四个箱子 的位置来作为状态,设计如下:
struct BFSState {
Pos man, box[4];
...
};
- 然后针对这个问题需要考虑几个点:
- 1)状态数太大:每个坐标的最大值为7,需要用 8 进制表示状态,总共 10 位,即 8 10 = 1073741824 8^{10} = 1073741824 810=1073741824。
- 2)箱子的无差别性:由于四个箱子被认为是一样的,所以对于两组箱子的状态,位置重排后一一对应的应该被认为是同样的状态,例如: [ ( 1 , 1 ) , ( 1 , 2 ) , ( 2 , 4 ) , ( 4 , 5 ) ] [(1,1), (1,2), (2,4), (4,5)] [(1,1),(1,2),(2,4),(4,5)] 和 [ ( 4 , 5 ) , ( 1 , 1 ) , ( 1 , 2 ) , ( 2 , 4 ) ] [(4,5), (1,1), (1,2), (2,4)] [(4,5),(1,1),(1,2),(2,4)] 是同一个状态。
- 3)非法状态:所有墙体的位置都应该被计算为非法状态。
- 基于以上三点,我们可以对状态进行压缩,减少状态空间,首先用 小人 做一次连通性搜索,标记所有能够到达的点,然后进行编号,如图五-1-4所示:

图五-1-4 - 这样一来每个坐标只需要用一个 小于 24 的数来表示,也就是 2 4 5 = 7962624 24^5 = 7962624 245=7962624,即最大的状态编号。
- 然而实际上,基于四个箱子的无差异性,这是一个组合问题,不是排列问题,并且由于箱子和人都不能重叠,对于这个关卡来说,23 个空位置,选出 4 个位置放箱子,再从 19 个位置选择 1 个放小人,所以总的状态数是:
C 23 4 C 19 1 = 4037880 C_{23}^4C_{19}^1 = 4037880 C234C191=4037880 - 由于实际状态数会明显少很多(比如当某个箱子被推到墙角以后就无法再扩展状态),所以对于得到的状态编号我们可以进行一层散列哈希,用一个更小的数组来进行标记节省内存。
- 最后,结束状态 就是 所有箱子都到指定位置,当然,这个问题中结束状态有多个,因为箱子虽然归位了,小人的位置是可以任意选择的。
3)右转迷宫
【例题4】给定一个 n × m ( n , m < = 500 ) n \times m (n,m <= 500) n×m(n,m<=500) 的迷宫,一个入口一个出口。走迷宫的规则是优先选择右边的方向走,如果右边有墙就往前走,如果还有墙就往左,如果还有就掉头,问从入口到出口,以及出口到入口,能否将整个迷宫的区域走遍。如图5就是一种可行方案。
图五-1-5
- 这个问题的动态对象只有一个,但是光用一个人的位置来表示状态肯定是不够,考虑 图五-1-6 的这种情况:
图五-1-6 - 如果只用位置来标记状态,那么遇到一个三面都是墙的位置就要回头,但是回头的时候发现状态已经被标记过了,所以就不会继续扩展状态,导致搜索提前结束。
- 那么这里的改善方式就是在状态中加入一个方向的维度,即:
struct BFSState {
Pos p;
char dir;
...
};
- 这样一来,对于同一个格子的 前进 和 回头 就不是同一个状态了。
4)收集物品
【例题5】给定一个 n × m ( n , m < = 20 ) n \times m (n,m <= 20) n×m(n,m<=20) 的迷宫,一个入口一个出口。并且有 x ( x < = 10 ) x( x <= 10 ) x(x<=10) 个金币,问从入口到出口并且收集到所有 x 的最少时间。
图五-1-7
- 在每个位置上,没有拿到金币和拿到金币的状态是不一样的(从图五-1-7中可以看出,黄色、金黄色、橙色 的三种路径分别表示没有取得金币,取得一个金币,取得两个金币的情况)。那么将所有金币组合一下,总共有 2 x 2^{x} 2x 种状态,所以状态就是坐标和金币的组合态,即:
struct BFSState {
Pos p;
int coinMask;
...
};
- 其中 coinMask 是一个二进制数,它的第 k ( 0 < = k < x ) k(0 <= k < x) k(0<=k<x) 位 代表第 k k k 个金币有没有获得,那么结束状态就是坐标等于出口,并且 coinMask 为 2 x − 1 2^x-1 2x−1。
5)贪吃蛇
【例题6】一个 n × m ( n , m < = 20 ) n \times m (n,m <= 20) n×m(n,m<=20) 的迷宫,左上角 (0, 0) 为出口,一条蛇在迷宫中,蛇的身体长度为 L,最多占用 8 个格子,有上下左右四个方向可以走,蛇走的时候不能碰到自己的身体,问最少需要多少步才能走到出口。
图五-1-8
- 首先蛇的身体长度为 8,也就是如果把所有身体占用的格子作为状态,就是 40 0 8 400^8 4008,这样就很恐怖了。
- 但是仔细分析一下,因为身体是连在一起的,所以只要头部确定,第二节身体格子的方向最多4种,后面每个身体格子的方向最多3种,所以总的状态数是 20 ∗ 20 ∗ 4 ∗ 3 6 = 1166400 20 * 20 * 4 * 3^6 = 1166400 20∗20∗4∗36=1166400,状态表示如下:
struct BFSState {
Pos p;
int dir[7];
...
};
- 由于方向数目为四个,所以我们可以把每个身体的方向用一个四进制的数来表示, 4 7 = 2 14 4^7 = 2^{14} 47=214 在 32 位整数范围内,所以状态表示可以变成:
struct BFSState {
Pos p;
int dirMask;
...
};
- 和金币问题类似,采用二进制进行位压缩;
2、同余搜索
【例题7】给定一个不能被 2 或 5 整除的数 n ( 0 < = n < = 10000 ) n (0 <= n <= 10000) n(0<=n<=10000),求一个十进制表示都是 1 的数 K K K ,使得 K K K 是 n n n 的倍数,且最小。例如: n = 3 n = 3 n=3,那么答案就是 111,因为 111 m o d 3 = 0 111 \mod 3 = 0 111mod3=0。
- 模拟 1 个 1,2 个 1, 3 个 1 … 不断对 n n n 取余数,根据初等数论的知识,我们令 a [ i ] a[i] a[i] 表示 i i i 个 1 对 n n n 取余数的值,则有: a [ i ] = ( a [ i − 1 ] ∗ 10 + 1 ) m o d n a[i] = (a[i-1] * 10 + 1) \mod n a[i]=(a[i−1]∗10+1)modn
- 那么当某个 a [ i − 1 ] a[i-1] a[i−1] 出现过了,后面的 a [ i ] a[i] a[i] 势必也会重复,所以我们可以拿 a [ i ] a[i] a[i] 作为状态,结束状态就是找到 a [ . . . ] = 0 a[...] = 0 a[...]=0, 这样最多进行 10000 次枚举就能找到满足条件的状态。
3、预处理
- 这里介绍的是一种思想,适用于数据量很大的问题。
- 对于一些 结束状态 永远是固定的,而 初始状态 不同,并且询问很多 的问题,那么我们可以从 结束状态 开始搜索,并且将到达的所有状态都一次性搜索出来,那么,每次询问的时候只需要查询状态步数即可,总时间复杂度就是预处理的时间,查询时间复杂度 O ( 1 ) O(1) O(1)。
本文所有示例代码均可在以下 github 上找到:github.com/WhereIsHeroFrom/模板/广度优先搜索

六、单向广搜题集整理
| 题目链接 | 难度 | 解法 |
|---|---|---|
| PKU 1096 Space Station Shielding | ★☆☆☆☆ | FloodFill |
| HDU 2952 Counting Sheep | ★☆☆☆☆ | FloodFill |
| HDU 1026 Ignatius and the Princess I | ★☆☆☆☆ | 优先队列应用 |
| HDU 1072 Nightmare | ★☆☆☆☆ | 记录时间维度 |
| HDU 1240 Asteroids! | ★☆☆☆☆ | 【例题1】三维迷宫 |
| HDU 1415 Jugs | ★☆☆☆☆ | 经典广搜 - 倒水问题 |
| HDU 1495 非常可乐 | ★☆☆☆☆ | 经典广搜 - 倒水问题 |
| HDU 1195 Open the Lock | ★☆☆☆☆ | 一维的数码可达问题 |
| PKU 1915 Knight Moves | ★★☆☆☆ | 马的走位 |
| HDU 1372 Knight Moves | ★★☆☆☆ | 马的走位 |
| HDU 2235 机器人的容器 | ★★☆☆☆ | FloodFill |
| HDU 3713 Double Maze | ★★☆☆☆ | 2个人的迷宫问题 |
| HDU 2216 Game III | ★★☆☆☆ | 【例题2】2个人的迷宫问题 |
| HDU 3309 Roll The Cube | ★★☆☆☆ | 2个人的迷宫问题 |
| HDU 1254 推箱子 | ★★☆☆☆ | 【例题3】推箱子问题 |
| PKU 1475 Pushing Boxes | ★★☆☆☆ | 【例题3】推箱子问题 |
| HDU 1253 胜利大逃亡 | ★★☆☆☆ | 三维迷宫 |
| HDU 1252 Hike on a Graph | ★★☆☆☆ | 3个人的迷宫问题 |
| HDU 1044 Collect More Jewels | ★★☆☆☆ | 【例题5】二进制状态压缩的应用 |
| PKU 2157 Maze | ★★☆☆☆ | 二进制状态压缩的应用 |
| HDU 3220 Alice’s Cube | ★★☆☆☆ | 预处理 + 位运算 |
| HDU 1429 胜利大逃亡(续) | ★★☆☆☆ | 二进制状态压缩的应用 |
| PKU 1077 Eight | ★★☆☆☆ | 经典八数码 |
| HDU 2170 Frogger | ★★☆☆☆ | 带停留的搜索 |
| HDU 1226 超级密码 | ★★☆☆☆ | 枚举位数 |
| PKU 2551 Ones | ★★☆☆☆ | 同余搜索 |
| PKU 1426 Find The Multiple | ★★☆☆☆ | 同余搜索 |
| PKU 1860 Currency Exchange | ★★☆☆☆ | SPFA |
| PKU 1237 The Postal Worker Rings | ★★☆☆☆ | SPFA |
| PKU 1724 ROADS | ★★☆☆☆ | 优先队列应用 |
| HDU 2822 Dogs | ★★☆☆☆ | 优先队列应用 |
| HDU 2851 Lode Runner | ★★☆☆☆ | 优先队列应用 |
| HDU 2237 无题III | ★★☆☆☆ | 多维状态搜索 |
| HDU 3912 Turn Right | ★★☆☆☆ | 【例题4】右转迷宫 + 增加方向维度 |
| PKU 2283 Different Digits | ★★★☆☆ | 同余搜索 |
| PKU 2206 Magic Multiplying Machine | ★★★☆☆ | 同余搜索 |
| HDU 1104 Remainder | ★★★☆☆ | 同余搜索 |
| PKU 3000 Frogger | ★★★☆☆ | 同余搜索 |
| HDU 1317 XYZZY | ★★★☆☆ | 最长路判环 |
| HDU 1384 Intervals | ★★★☆☆ | 差分约束 |
| HDU 1531 King | ★★★☆☆ | 差分约束 |
| PKU 1716 Integer Intervals | ★★★☆☆ | 差分约束 |
| PKU 3501 Escape from Enemy Territory | ★★★☆☆ | 二分答案 + BFS |
| PKU 1292 Will Indiana Jones Get | ★★★☆☆ | 二分答案 + BFS |
| PKU 1485 Fast Food | ★★★☆☆ | SPFA |
| PKU 1511 Invitation Cards | ★★★☆☆ | SPFA |
| PKU 1545 Galactic Import | ★★★☆☆ | SPFA |
| PKU 1734 Sightseeing trip | ★★★☆☆ | 无向图最小环 |
| PKU 1420 Spreadsheet | ★★★☆☆ | 建立拓扑图后广搜 |
| PKU 2353 Ministry | ★★★☆☆ | 需要存路径 |
| PKU 2046 Gap | ★★★☆☆ | A* |
| PKU 1778 All Discs Considered | ★★★☆☆ | |
| PKU 1097 Roads Scholar | ★★★☆☆ | SPFA |
| PKU 1324 Holedox Moving | ★★★☆☆ | 【例题6】状态压缩的广搜 |
| PKU 1062 昂贵的聘礼 | ★★★☆☆ | 优先队列应用 |
| PKU 3897 Maze Stretching | ★★★☆☆ | |
| PKU 3346 Treasure of the Chimp | ★★★☆☆ | |
| PKU 2983 Is the Information Reliable | ★★★☆☆ | 最长路判环 |
| PKU 1482 It’s not a Bug, It’s a | ★★★☆☆ | |
| HDU 3008 Warcraft | ★★★☆☆ | |
| HDU 3036 Escape | ★★★☆☆ | |
| PKU 3322 Bloxorz I | ★★★☆☆ | 当年比较流行这个游戏 |
| HDU 1043 Eight | ★★★☆☆ | 数据较强,需要预处理 |
| HDU 1307 N-Credible Mazes | ★★★☆☆ | 多维空间搜索,散列HASH |
| HDU 3681 Prison Break | ★★★☆☆ | 状态压缩 |
| HDU 3500 Fling | ★★★☆☆ | 某个消除游戏 |
| HDU 2605 Snake | ★★★★☆ | 状态压缩 |
| HDU 1122 Direct Visibility | ★★★★☆ | 计算几何判断连通性 |
| PKU 3912Up and Down | ★★★★☆ | 离散化 + BFS |
| PKU 3463 Sightseeing | ★★★★☆ | SPFA |
| PKU 3328 Cliff Climbing | ★★★★☆ | 日本人的题就是这么长 |
| PKU 3455 Cheesy Chess | ★★★★☆ | 仔细看题 |
| PKU 1924 The Treasure | ★★★★☆ | |
| PKU 3702 Chessman | ★★★★★ | 弄清状态同余的概念 |
| HDU 3278 Puzzle | ★★★★★ | 几乎尝试了所有的搜索 -_- |
| HDU 3900 Unblock Me | ★★★★★ | 8进制压缩状态,散列HASH,位运算加速 |