学习笔记-简单的排序算法(Python实现)
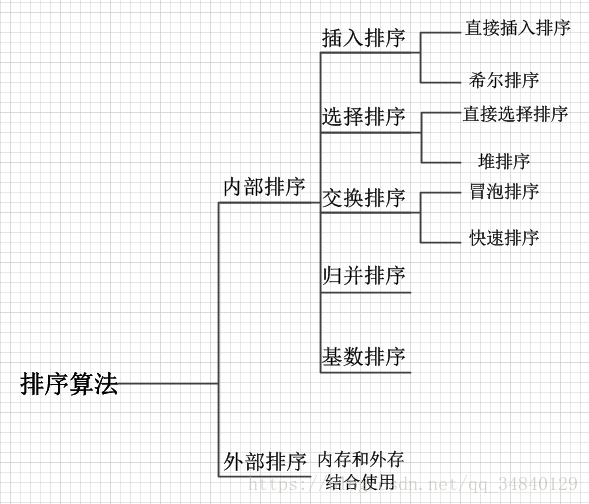
1、直接插入排序
时间复杂度:O(n^2)
空间复杂度:O(1)
稳定性:稳定
插入排序就是将一个数据插入到已经排好序的序列中。
如图所示,插入元素是2,则用2依次与左边的元素比较,只要左边的元素大于2,就将左边的元素右移一位,直到2大于左边元素为止。

def insert_sort(lst):
for i in range(1, len(lst)):
x = lst[i]
temp = i
while temp > 0 and lst[temp-1] > x:
lst[temp] = lst[temp-1] #只要左边元素大于右边元素,就将较大的元素交换到右边
temp -= 1
lst[temp] = x
return lst
if __name__=="__main__":
lst = [4,1,6,8,34,9,2,5]
print(insert_sort(lst))
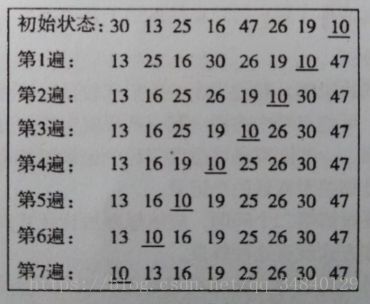
2、希尔排序
时间复杂度:与所选的增量序列有关
空间复杂度:O(1)
稳定性:不稳定
基本思想:取一个递减的增量序列{n/2,(n/2)/2,...,1},首先取增量n/2,所有距离为n/2的倍数的记录放在同一个组中,在各组内进行直接插入排序;然后取第二个增量(n/2)/2,继续上述操作;直至所有的增量为1,即所有记录放在同一个组中进行直接插入排序为止。
该算法实质上是一种分组插入方法。进行一次比较可以跨过多个元素,可能消除多个元素交换。
def shell_sort(lists):
length = len(lists)
gap = length // 2
while gap > 0:
for i in range(0, gap):
j = i + gap #j是待插入元素位置
while j < length:
temp = j
key = lists[temp]
while temp > 0 and lists[temp-gap] > key: #利用直接插入排序将每个组中的元素排序
lists[temp] = lists[temp-gap]
temp -= gap
lists[temp] = key
j += gap #同一个小组中,再向已排序小组中插入j+gap位置的元素
gap //= 2
return lists
if __name__=="__main__":
lst = [30,13,25,16,47,26,19,10]
print(shell_sort(lst))
3、直接选择排序
时间复杂度:O(n^2)
空间复杂度为:O(1)
稳定性:不稳定
每次都顺序扫描出未排序序列中最小的元素,然后将其添加在已排序序列的末尾。
def select_sort(lst):
for i in range(len(lst) - 1): # 只需要比较len(lst)-1次,剩余的最后一个元素肯定是最大的
min_position = i # min_position记录最小元素的位置
for j in range(i + 1, len(lst)):
if lst[j] < lst[min_position]: # 如果有更小的元素,则更新min_position
min_position = j
# if i != min_position: #有可能位置i已经是最小元素的位置,所以此时就不需要交换了
# lst[i], lst[min_position] = lst[min_position], lst[i]
lst[i], lst[min_position] = lst[min_position], lst[i]
return lst
if __name__ == "__main__":
lst = [4, 1, 6, 8, 34, 9, 2, 5]
print(select_sort(lst))直接选择排序的实际排序效率低于插入排序。所以直接选择排序很少被实际应用。
将原来已排序序列的后一个元素交换到最小元素的位置,有可能出现两个相同的元素做交换,这说明算法不稳定。
延伸:
直接选择排序比较低效,是因为在做顺序扫描时,每次都需要从头做一次完整的比较,这个过程中做了很多重复的工作。要想克服这个缺点,就应该设法记录比较之后的获得的信息。利用树的结构来记录这种信息,由此出现了堆排序:图解堆排序。但是堆排序也可能出现两个相同元素被交换的情况。所以算法也具有不稳定性。堆排序的时间复杂度为O(nlog n),空间复杂度是O(1)。
4、堆排序
时间复杂度为:O(nlog n),
空间复杂度为:O(1)
稳定性:不稳定
当元素个数较少时,堆排序的大部分时间花在了堆的初始化和向下筛选上,当元素较多时,具有较好的效率。
具体原理和程序参见:点击打开链接
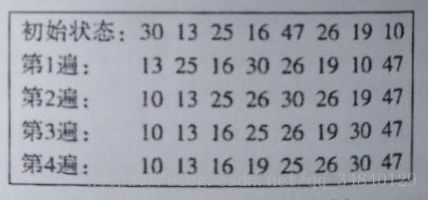
5、交换排序:冒泡排序
最坏的时间复杂度:O(n^2)
平均时间复杂度:O(n^2)
最好的时间复杂度:O(n)
空间复杂度:O(1)
一个未排序序列中,肯定存在逆序对(即前一个元素大于后一个元素),通过不断交换逆序对中两个元素的位置,最终将得到排序序列。
冒泡排序最坏的时间复杂度是O(n^2),平均时间复杂度也是O(n^2),最好情况下的时间复杂度是O(n)。其也是一种原位排序算法,空间复杂度是O(1)。是一种稳定的排序算法。
如果初始序列有序,则只需要扫描一次就结束了,时间复杂度是O(n)。
上图中的排序过程中,每一遍检查都可以将最大的元素交换到最后面。这就像水中的气泡浮起,也是这种算法名字的由来。
当序列中最小元素在序列的最后时,冒泡排序需要n-1遍扫描。在一般情况下,并不需要这么多次。只要在某次扫描中没有发现逆序对,则说明排序已经完成了。
def bubble_sort(lst):
for i in range(len(lst)-1): #最多需要比较len(lst)-1次
found = False #found变量初始为false,如果存在逆序对,则置为True,如果不存在,则为false,则会控制循环提前结束
for j in range(1, len(lst)-i): #第一次需扫描n个元素,第二次需扫描n-1个元素,依此类推
if lst[j-1] > lst[j]: #如果存在逆序对,则交换元素
lst[j-1], lst[j] = lst[j], lst[j-1]
found = True
if not found:
break
return lst
if __name__=="__main__":
lst = [30,13,25,16,47,26,19,10]
print(bubble_sort(lst))
冒泡排序效率低于插入排序。一是因为反复交换相邻元素,累加起来代价较大;二是一些距离最终位置较远的元素会拖累整个算法。
此外,还有一种交错起泡的算法,可以将小元素快速地移向左方。从左向右扫描一次,再从右向左扫描一次,交替进行。
只需要 4遍就可以完成以下的排序工作。
6、快速排序
时间复杂度:O(nlog n)
空间复杂度:O(log n)
稳定性:不稳定
快速排序算法在实践中是平均速度最快的算法之一。
基本思想是:从序列中选一个元素作为‘标准’,将序列中剩余的元素与这个标准一一比较,小于‘标准’的元素放在其左边,大于‘标准’的元素放在其右边;这样就将数据分割成了独立的两部分,然后在两个子序列中按照同样的方式递归地划分下去,直到整个数据变成有序序列。
算法实现:
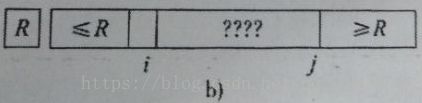
取序列中第一个元素作为‘标准’,记为R。小于R的元素在其左边,大于R的元素在其右边,中间是尚未检查的元素。此外,下标i和j分别指向未检查元素序列的第一个位置和最后一个位置(i初始时指向整个序列的第一个元素)。然后交替进行如下操作:
(1)从位置j开始向左逐个比较当前元素与R的大小,直至找到第一个小于R的元素,将其存入位置i。然后i加1,指向下一个需要检查的元素。
(2)从位置i开始向右逐个比较当前元素与R的大小,直至找到第一个大于R的元素,将其存入位置j。
重复以上两步,直到i与j相等,此时将R存入i=j的这个位置,一次划分完成。
def quick_sort(lst):
record = qsort_rec(lst, 0, len(lst)-1) #i和j分别初始化为序列的第0个和最后一个位置
return record
def qsort_rec(lst, l, r):
if l >= r: #说明序列中没有元素或者只有一个元素
return
i, j = l, r
standard = lst[i] #标准元素为序列中最左边的元素
while i < j: #终止时i=j
while i < j and lst[j] >= standard: #从右向左找到第一个小于标准的元素
j -= 1
if i < j: #将上面找到的元素放到位置i
lst[i] = lst[j]
i += 1
while i < j and lst[i] <= standard: #从左向右找到第一个大于标准的元素
i += 1
if i < j: #将上面找到的元素放到位置j
lst[j] = lst[i]
j -= 1
lst[i] = standard
qsort_rec(lst, l, i-1)
qsort_rec(lst, i+1, r)
return lst
if __name__=="__main__":
lst = [30,13,25,16,47,26,19,10]
print(quick_sort(lst))
如果每次划分都能将序列分成两个基本相等的子序列,那么整个序列将被分为大约log n层;在其中一层中,元素的比较次数不会超过序列的长度n,所以快速排序的平均时间复杂度是O(nlog n)。
但是,如果每层划分得到的两个子序列中总有一个为空,另一个子序列中的元素个数只比本层划分前少一个,这样需要分为n-1层,每层的比较次数从n-1逐层减少到1,。此时是快速排序最坏的时间复杂度O(n^2)。
其空间复杂度最坏时是O(n),但是可以通过不同的实现方式,提升至O(log n)。
7、归并排序
时间复杂度:O(nlog n)
空间复杂度:O(n)
稳定性:稳定
基本过程:
- 首先,将待排序序列中的n个元素看作n个有序子序列,每个子序列长度为1。
- 然后,将当前序列中的有序子序列两两归并,完成一遍后整个序列中的已排序序列个数减半,每个子序列长度翻倍。
- 对长度翻倍后的子序列继续两两归并,最后将得到一个长度为n的有序序列。
归并排序适合处理存储在外存中的大量数据。
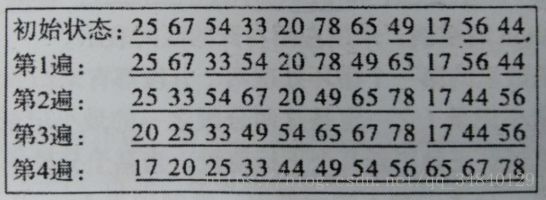
下图是一个例子:第一遍将序列归并为一组长度为2的有序序列,最后的元素44没有归并对象,原样留到下一步;第二遍归并出3个长度为4的有序序列;第三遍只能归并出一个长度为8的有序序列,剩余的3个元素原样留到下一步;最后一步便已经得到了排序序列。
# 实现一对有序序列的归并操作,将归并的结果存入另一个顺序表的相同位置。
def merge(lfrom, lto, low, mid, high):
i, j, k = low, mid, low
while i < mid and j < high: # 每次都将两个子序列中最小的元素加入到lto中,但是总是会有某个序列的后面会剩下几个元素,需要下面的两个循环再将这些元素加到lto中
if lfrom[i] <= lfrom[j]:
lto[k] = lfrom[i]
i += 1
else:
lto[k] = lfrom[j]
j += 1
k += 1
while i < mid: # 将第一个子序列的剩余元素加入到lto中
lto[k] = lfrom[i]
i += 1
k += 1
while j < high: # 将第二个子序列的剩余元素加入到lto中
lto[k] = lfrom[j]
j += 1
k += 1
return lto
# 其中的某一遍归并操作,将表中的所有元素进行一遍归并
def merge_pass(lfrom, lto, list_len, sub_len): # list_len为整个序列的长度,sub_len为子序列的长度
i = 0
while i + 2 * sub_len <= list_len: # 处理序列中长度为sub_len的两个子序列
merge(lfrom, lto, i, i + sub_len, i + 2 * sub_len)
i += 2 * sub_len
if i + sub_len < list_len: # 此时剩下两个子序列,但只有第一个子序列的长度满足sub_len
merge(lfrom, lto, i, i + sub_len, list_len)
else: # 否则,此时只剩下一个子序列,直接将这个子序列添加在lto后面
for j in range(i, list_len):
lto[j] = lfrom[j]
# 主函数,分配不同长度的sub_len,调用归并函数
def merge_sort(lst):
sub_len, list_len = 1, len(lst)
temp_lst = [None] * list_len
while sub_len < list_len: # 不断将sub_len的长度翻倍
merge_pass(lst, temp_lst, list_len, sub_len)
sub_len *= 2
merge_pass(temp_lst, lst, list_len, sub_len)
sub_len *= 2
if __name__ == "__main__":
lst = [30, 13, 25, 16, 47, 26, 19]
merge_sort(lst)
print(lst)8、基数排序
时间复杂度:O(d*(n+r))
空间复杂度:O(n+r)
稳定性:稳定
d为位数,r为基数,n为数组中元素的个数。
基数排序不需要将元素相互比较,只需要将元素分类即可。如果对效率有所要求,而不太关心空间的使用时,可以考虑使用。
下面以最低位优先法(LSD)为例:
原数组为:[73,22,93,43,55,14,28,65,39,81]
首先根据个位的数值,将元素分配到0~9的桶中:
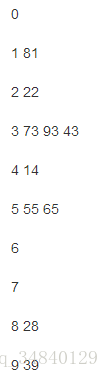
然后将这些元素重新汇总起来:
[81,22,73,93,43,14,55,65,28,39]
在根据十位的数值来分配:
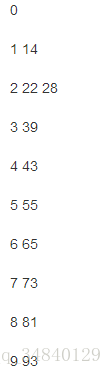
然后再将这些元素汇总起来:
[14,22,28,39,43,55,65,73,81,93]
此时的元素已经被排序完毕。
LSD适用于位数少的数列,如果位数多,则使用最高位优先法(MSD)。
MSD是从最高位开始进行分配,分配之后不马上汇总为一个数组,而是在每个桶中再建立子桶,将每个子桶中的元素按照下一数位的值分配到子桶中,在进行完最低数位的分配后,再汇总回一个数组中。
import math
def radix_sort(lists, radix=10):
k = int(math.ceil(math.log(max(lists), radix)))
bucket = [[] for i in range(radix)]
for i in range(1, k+1):
for j in lists:
bucket[j//(radix**(i-1)) % (radix**i)].append(j)
del lists[:]
for z in bucket:
lists += z
del z[:]
return lists
if __name__=="__main__":
lst = [30,13,25,16,47,26,19,10]
print(radix_sort(lst))
| 排序方法 | 最坏情况 | 平均情况 | 最好情况 | 空间复杂度 | 稳定性 |
| 直接插入排序 | 稳定 | ||||
| 希尔排序 | 不稳定 | ||||
| 直接选择排序 | 不稳定 | ||||
| 堆排序 | 不稳定 | ||||
| 冒泡排序 | 稳定 | ||||
| 快速排序 | 不稳定 | ||||
| 归并排序 | 稳定 | ||||
| 基数排序 | 稳定 |
注:d为位数,r为基数,n为数组中元素的个数。
1、直接插入排序:对于一个无序的序列,需要将元素从第一位挨个取出,将其当做新元素插入到有序序列中;每个元素在插入到有序序列中时,需要从后向前与元素挨个比较。这里两个操作都需要遍历原序列,所以其时间复杂度最坏和平均时都是![]() ,当原来序列有序时,最好的时间复杂度是
,当原来序列有序时,最好的时间复杂度是![]() 。
。
2、希尔排序的分析是一个复杂问题,与其所取的增量函数有关,其中涉及到数学上一些未解决的问题。一般认为在![]() 之间,较快的实现可以到
之间,较快的实现可以到![]() 。
。
3、直接选择排序:每次都需要顺序扫描出未排序序列中最小的元素,然后将其添加在已排序序列的末尾。其中需要遍历每个位置;在确定每个位置上的元素时,又需要从未排序序列中挨个比较出最小的一个元素。所以其时间复杂度都是![]() 。
。
4、堆排序:构建堆的时间是![]() 。交换堆顶与末尾元素,这个过程需要执行n次;堆顶元素下移的距离不会超过log n,所以重建堆的时间是
。交换堆顶与末尾元素,这个过程需要执行n次;堆顶元素下移的距离不会超过log n,所以重建堆的时间是![]() 。
。
5、冒泡排序:需要遍历n-1遍元素,第一遍遍历n个元素,第二遍遍历n-1个元素,......,依此类推,所以其时间复杂度为![]() 。当序列有序时,需要
。当序列有序时,需要![]() 时间即可。
时间即可。
6、快速排序:最好的情况是每次取到的元素都刚好平分整个数组,这样便划分为了log n层,每层元素的比较次数不超过序列的长度。所以时间复杂度为![]() 。最坏的情况就是每次取到的元素都是数组中最大或者最小的(正序或者逆序排列),每次划分只得到比上一次少一个元素的子序列,此时需要
。最坏的情况就是每次取到的元素都是数组中最大或者最小的(正序或者逆序排列),每次划分只得到比上一次少一个元素的子序列,此时需要![]() 时间。当每一次都平分数组时,其空间复杂度为
时间。当每一次都平分数组时,其空间复杂度为![]() ;最坏情况时,空间复杂度为
;最坏情况时,空间复杂度为![]() 。
。
7、归并排序:完成整个排序的归并遍数不会超过log n + 1,在每遍归并中需要做的比较次数不会超过n,所以总的时间为![]() 。算法中需要用到一个与原数组同样大小的临时数组,所以其空间复杂度为
。算法中需要用到一个与原数组同样大小的临时数组,所以其空间复杂度为![]() 。归并排序很消耗空间,一般内部排序不用,外部排序时才考虑使用。
。归并排序很消耗空间,一般内部排序不用,外部排序时才考虑使用。
8、基数排序:将元素分配到每个桶中的时间复杂度为![]() ,将元素再汇总起来的时间复杂度为
,将元素再汇总起来的时间复杂度为![]() ,分配和汇总共需要d次,所以总的时间复杂度为
,分配和汇总共需要d次,所以总的时间复杂度为![]() 。将元素进行‘装桶’操作时,都需要n+r个临时空间,所以空间复杂度为
。将元素进行‘装桶’操作时,都需要n+r个临时空间,所以空间复杂度为![]() 。
。