PyTorch实现ResNet18
ResNet-18结构
基本结点

代码实现
import torch
import torch.nn as nn
from torch.nn import functional as F
class RestNetBasicBlock(nn.Module):
def __init__(self, in_channels, out_channels, stride):
super(RestNetBasicBlock, self).__init__()
self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride, padding=1)
self.bn1 = nn.BatchNorm2d(out_channels)
self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=stride, padding=1)
self.bn2 = nn.BatchNorm2d(out_channels)
def forward(self, x):
output = self.conv1(x)
output = F.relu(self.bn1(output))
output = self.conv2(output)
output = self.bn2(output)
return F.relu(x + output)
class RestNetDownBlock(nn.Module):
def __init__(self, in_channels, out_channels, stride):
super(RestNetDownBlock, self).__init__()
self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride[0], padding=1)
self.bn1 = nn.BatchNorm2d(out_channels)
self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=stride[1], padding=1)
self.bn2 = nn.BatchNorm2d(out_channels)
self.extra = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride[0], padding=0),
nn.BatchNorm2d(out_channels)
)
def forward(self, x):
extra_x = self.extra(x)
output = self.conv1(x)
out = F.relu(self.bn1(output))
out = self.conv2(out)
out = self.bn2(out)
return F.relu(extra_x + out)
class RestNet18(nn.Module):
def __init__(self):
super(RestNet18, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3)
self.bn1 = nn.BatchNorm2d(64)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = nn.Sequential(RestNetBasicBlock(64, 64, 1),
RestNetBasicBlock(64, 64, 1))
self.layer2 = nn.Sequential(RestNetDownBlock(64, 128, [2, 1]),
RestNetBasicBlock(128, 128, 1))
self.layer3 = nn.Sequential(RestNetDownBlock(128, 256, [2, 1]),
RestNetBasicBlock(256, 256, 1))
self.layer4 = nn.Sequential(RestNetDownBlock(256, 512, [2, 1]),
RestNetBasicBlock(512, 512, 1))
self.avgpool = nn.AdaptiveAvgPool2d(output_size=(1, 1))
self.fc = nn.Linear(512, 10)
def forward(self, x):
out = self.conv1(x)
out = self.layer1(out)
out = self.layer2(out)
out = self.layer3(out)
out = self.layer4(out)
out = self.avgpool(out)
out = out.reshape(x.shape[0], -1)
out = self.fc(out)
return out
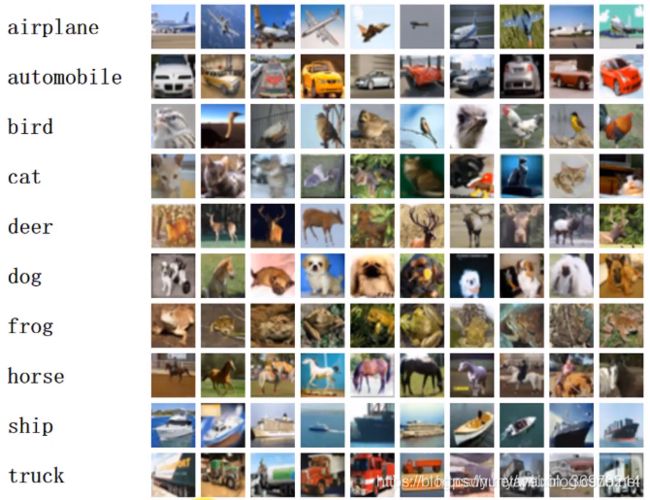
用来预测CIFAR-10数据集
数据集
官网链接:CIFAR-10 DATASET
测试代码
import torch
from torch import nn, optim
import torchvision.transforms as transforms
from torchvision import datasets
from torch.utils.data import DataLoader
from restnet18.restnet18 import RestNet18
# 用CIFAR-10 数据集进行实验
def main():
batchsz = 128
cifar_train = datasets.CIFAR10('cifar', True, transform=transforms.Compose([
transforms.Resize((32, 32)),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225])
]), download=True)
cifar_train = DataLoader(cifar_train, batch_size=batchsz, shuffle=True)
cifar_test = datasets.CIFAR10('cifar', False, transform=transforms.Compose([
transforms.Resize((32, 32)),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225])
]), download=True)
cifar_test = DataLoader(cifar_test, batch_size=batchsz, shuffle=True)
x, label = iter(cifar_train).next()
print('x:', x.shape, 'label:', label.shape)
device = torch.device('cuda')
# model = Lenet5().to(device)
model = RestNet18().to(device)
criteon = nn.CrossEntropyLoss().to(device)
optimizer = optim.Adam(model.parameters(), lr=1e-3)
print(model)
for epoch in range(1000):
model.train()
for batchidx, (x, label) in enumerate(cifar_train):
# [b, 3, 32, 32]
# [b]
x, label = x.to(device), label.to(device)
logits = model(x)
# logits: [b, 10]
# label: [b]
# loss: tensor scalar
loss = criteon(logits, label)
# backprop
optimizer.zero_grad()
loss.backward()
optimizer.step()
print(epoch, 'loss:', loss.item())
model.eval()
with torch.no_grad():
# test
total_correct = 0
total_num = 0
for x, label in cifar_test:
# [b, 3, 32, 32]
# [b]
x, label = x.to(device), label.to(device)
# [b, 10]
logits = model(x)
# [b]
pred = logits.argmax(dim=1)
# [b] vs [b] => scalar tensor
correct = torch.eq(pred, label).float().sum().item()
total_correct += correct
total_num += x.size(0)
# print(correct)
acc = total_correct / total_num
print(epoch, 'test acc:', acc)
if __name__ == '__main__':
main()
运行结果

感觉挺low的,迭代50多次能达到80多的准确率