哈喽大家好,这里是滑稽研究所。看过我们图像处理系列的朋友,应该知道识别答题卡那期文章。其中利用opencv框架,完美的实现了答题卡填涂区域的识别。在后台有小伙伴想要我完善一下判断选项对错并打分的功能,本期我们就来实现一下。
那么我们来复习一下往期的代码原理。我们需要对图片素材进行灰度化处理、透视变换、轮廓检测、腐蚀膨胀处理、区域分割、边框计算、区域计算。实际上我们是通过像素面积的过滤、填涂区域优化和获取选项坐标来完成答题卡的识别的。
素材:
那么在获取到答题卡的填涂区域之后就好办了。我们首先分隔答题卡,去除干扰项,然后把不同的区域打上标签。我们的答题卡是自上而下排序的。那么我们获取到的填涂项的x坐标即横坐标就派上了用场。选项A~E一定是占据了五个不同的区域。我们已经为不同区域打上了标签。剩下的就是交给我们的if判断语句了。这时我们已经为填涂项赋上了实际的意义。即从像素坐标转换成了具有实际意义的选项。
那y坐标就没有用了吗?非也。经过上面的处理我们只是得到了填涂区域对应的选项。但是我们还没有进行排序。大家知道无序的选项是没有意义的。而刚刚我们说了该答题卡的题号顺序是自上而下的。因为我们遍历选项时,是同时得到x、y坐标的,因此我们可以保证得到的坐标是配对的。
其中横纵坐标分别填入两个list中,然后使用zip方法合并list。这时我们再按照每个list的第二个元素也就是纵坐标进行由小到大的排序,就可以得到正确的顺序。
这时我们才真正获取到了需要的数据。即考生填涂的选项顺序,我们再新建一个list放正确的答案,与考生的答案进行对比,经计算得出考生的正确率,并给出分数。
好,思路清晰,上代码!
import cv2
import numpy as np
path = './test_01.png'
img = cv2.imread(path)
imgGray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
imgBlur = cv2.GaussianBlur(imgGray,(3,3),1)
imgCanny = cv2.Canny(imgBlur,100,120)
cv2.imshow("O", imgCanny)
imgContour = img.copy()
cnts = cv2.findContours(imgCanny, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)[0]
for cnt in cnts:
area = cv2.contourArea(cnt)
# 这个输出各个轮廓的面积
#print(area)
#
if area >= 500:
cv2.drawContours(imgContour, cnt, -1, (255, 0, 0), 3)
peri = cv2.arcLength(cnt, True)
# 找出轮廓的突变值
approx = cv2.approxPolyDP(cnt, 0.02 * peri, True)
# approx找到的是一个轮廓有几个突变值,有几个角就会有几个突变值
# 返回的是一个list,输出他的长度,就可以知道到底有几个角
#print(approx)
a1,a2,a3,a4 = list(approx[0][0]),list(approx[1][0]),list(approx[2][0]),list(approx[3][0])
#cv2.imshow("Canny Image",imgContour)
mat1 = np.array([a1,a2,a3,a4],dtype=np.float32)
#透视变换
#计算矩形宽高
width = 402#int(((a4[0]-a1[0])+(a3[0]-a2[0]))/2)
height = 518#int(((a2[1]-a1[1])+(a3[1]-a4[1]))/2)
#计算还原后的坐标
new_a1 = [0,0]
new_a2 = [0,height]
new_a3 = [width,height]
new_a4 = [width,0]
mat2 = np.array([new_a1,new_a2,new_a3,new_a4],dtype=np.float32)
#计算变换矩阵
mat3 = cv2.getPerspectiveTransform(mat1,mat2)
#进行透视变换
res = cv2.warpPerspective(imgCanny,mat3,(width,height))
res1 = cv2.warpPerspective(img,mat3,(width,height))
imgxx = cv2.cvtColor(res1,cv2.COLOR_BGR2GRAY)
binary = cv2.threshold(imgxx,0,255,cv2.THRESH_BINARY_INV | cv2.THRESH_OTSU )[1]
#变换完成
#cv2.imshow("Output",res1)
cntss = cv2.findContours(res, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)[0]
for cnt1 in cntss:
area1 = cv2.contourArea(cnt1)
# 这个输出各个轮廓的面积
#print(area)
#
if area1 >= 1500 and area1<=1700:
#把圆的轮廓画成黑色
cv2.drawContours(binary, cnt1, -1, (0, 0, 0), 10)
kernel = np.ones((5, 5), np.uint8)
imgDialation = cv2.dilate(binary, kernel, iterations=1)
cv2.imshow("Out", imgDialation)
cntsss = cv2.findContours(imgDialation, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)[0]
l1 = []
l2 = []
l3 = ['B','E','A','D','B']
for cnt2 in cntsss:
area2 = cv2.contourArea(cnt2)
#print(area)
if area2 <= 1200 and 800<=area2:
#cv2.drawContours(res1, cnt, -1, (0, 255, 0), 5)
#轮廓长
peri = cv2.arcLength(cnt2, True)
# 找出轮廓的突变值
approx1 = cv2.approxPolyDP(cnt2, 0.02 * peri, True)
x, y, w, h = cv2.boundingRect(approx1)
#外接矩形
#print(x+w//2,y+h//2)
m = x+w//2
n = y+h//2
l1.append(m)
l2.append(n)
#拼接两个一维列表,使x,y坐标配对。
mix1 = list(zip(l1,l2))
#按列表第二个元素升序,即按y值由小到大排列。
#这是我们得到的答案为正确顺序。
mix1.sort(key=lambda x: x[1])
if 400>x>80 and 50
运行结果:
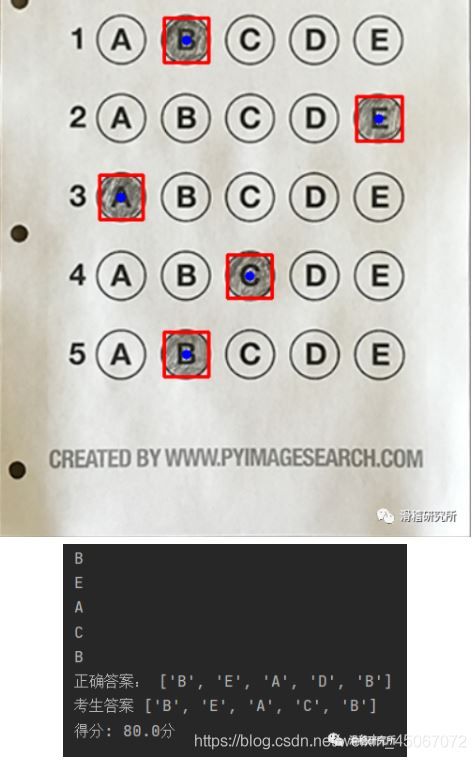
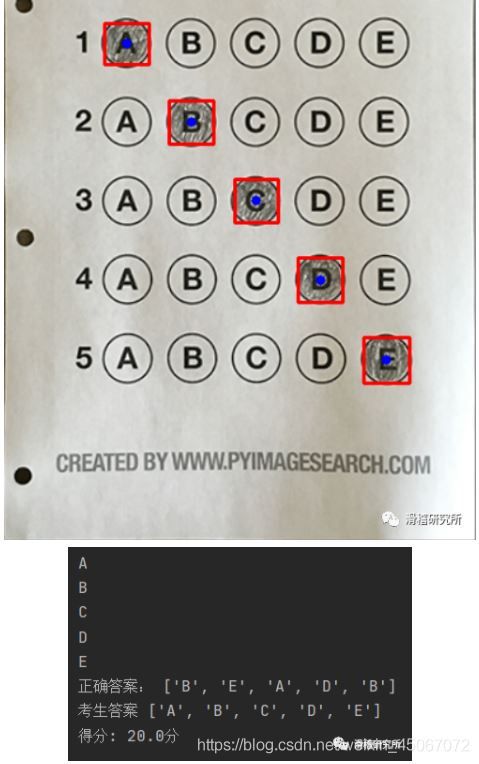
以上为两个图片素材的运行结果,我们只放出其中一部分。剩余的素材大家自行实验。
可以看到,程序成功的识别了考生填涂的答题卡,并给出了考生答案、正答案和考生最后的得分。
综上功能实现,任务完成。大家学会了吗?
以上就是Python识别答题卡并给出分数的详细内容,更多关于Python识别答题卡的资料请关注脚本之家其它相关文章!