毕业设计 - 题目:基于stm32的智能温控风扇设计与实现
文章目录
- 1 简介
- 2 绪论
-
- 2.1 课题背景
- 3 系统设计
-
- 3.1 系统架构
- 3.2 硬件部分
-
- 3.2.1 DS18B20 简介
- 3.2.2 LCD1602 液晶屏简介
- 3.3 软件部分
-
- 3.3.1 整体软件流程
- 3.3.2 初始化
- 3.3.3 温度采集与显示
- 3.4 实现效果
- 3.5 部分相关代码
- 4 最后
1 简介
Hi,大家好,这里是丹成学长,今天向大家介绍一个 单片机项目
基于stm32的智能温控风扇设计与实现
大家可用于 课程设计 或 毕业设计
技术解答、毕设帮助、开题指导
print("Q 746876041")
2 绪论
2.1 课题背景
随着科技的日新月异,智能家居逐渐走入普通家庭,风扇作为基本的家用电器也将成为智能家居的一部分。这里介绍的是以STM32单片机为控制单元并结合嵌入式技术设计的一款具有温控调速、液晶显示温度等信息的智能电风扇。经过前期设计、制作和最终的测试得出,该风扇电源稳定性好,操作方便,运行可靠,功能强大,价格低廉,节约能耗,能够满足用户多元化的需求。该风扇具有的人性化设计和低廉的价格很适合普通用户家庭使用。
3 系统设计
3.1 系统架构
设计采用STM32单片机做主控芯片,通过DS18B20采集温度,将温度显示在LCD1602上。根据温度的不同,利用STM32对风扇进行调速,总体硬件设计如下图所示

3.2 硬件部分
3.2.1 DS18B20 简介
DS18B20 是美国 DALLAS 半导体公司继 DS1820 之后最新推出的一种改进型智能温度传感器。 与传统的热敏电阻相比, 它能够直接读出被测温度并且可根据实际要求通过简单的编程实现 9~12 位的数字值读数方式。

3.2.2 LCD1602 液晶屏简介
1602 液晶也叫 1602 字符型液晶, 它是一种专门用来显示字母、 数字、 符号等的点阵型液晶模块。 它由若干个 5X7 或者 5X11 等点阵字符位组成, 每个点阵字符位都可以显示一个字符, 每位之间有一个点距的间隔, 每行之间也有间隔, 起到了字符间距和行间距的作用, 正因为如此所以它不能很好地显示图形

3.3 软件部分
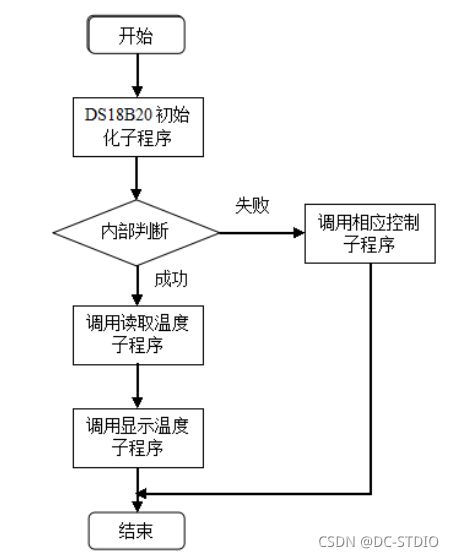
3.3.1 整体软件流程
控制系统软件使用 C 语言编程。
使用模块化设计, 除主程序外, 还有各功能子程序, 分别执行直流电机驱动调速及温度采集、 显示等功能, 编辑环境采用集成开发环环境 Keil。
程序总体运行流程图如下:

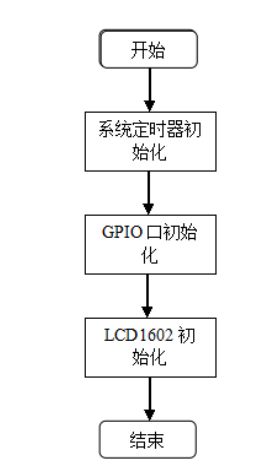
3.3.2 初始化
系统初始化包括 STM32 系统定时器初始化, GPIO 口初始化以及 LCD1602 初始化等。
3.3.3 温度采集与显示
DS18B20 温度传感器进行温度采集时, 要依次进行初始化, ROM 操作指令, 存储器操作指令, 数据传输等操作
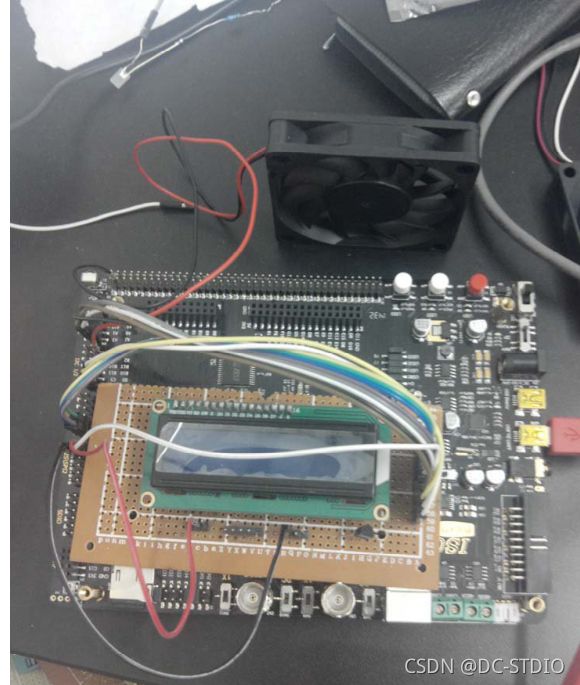
3.4 实现效果

3.5 部分相关代码
/************************************************
作者:丹成学长,Q746876041
************************************************/
1.主函数
#include "stm32f10x.h"
#include "bsp_SysTick.h"
#include 4 最后
技术解答、毕设帮助、开题指导
print("Q 746876041")

单片机毕设项目大全:
https://blog.csdn.net/huawei123444/article/details/119822845