学习笔记——深蓝学院点云系列公开课05:3D物体检测的发展与未来
3D物体检测的发展与未来
今天在深蓝学院的网站上找到了以后,就迫不及待的看了一波 还是很棒的 有一些启发
直接把博客当成笔记了
网站链接:https://www.shenlanxueyuan.com/open/course/97
主讲人:charles qi 祁芮中台 pointnet和pointnet++ 第一作者

三维点云领域中绝对绝的大佬级人物

课程主要内容:
- 背景介绍:3D检测的定义与应用
- 3D物体检测的近期发展
- 3D物体检测的未来方向
- 科研经验分享与讨论
背景介绍
为什么要做三维?回顾互联网发展的历程
从1998年谷歌创立到2016年alphago被创立,互联网与AI一直应用在虚拟世界以及互联网世界中,但随着ai 的飞速发展,互联网逐渐走进了真实的物理世界中。
如05年的DARPA挑战,10年kinect被发明,13年KITTI数据集被提出,15年shapenet数据集被提出,16年开始基于3D 的数据网络得到长久发展。
但是在距离实现的过程中仍然有很长足的路要走。
在未来的几年中,基于现实世界的应用AI会的车到常驻的发展。
什么是3D物体检测(3D object detection)?
输入:3D感知数据:如RGB图像 深度图像 雷达扫描图像
输出: 物体的定位、姿态、语义等
评价标准:如果用3Dbounding box 为标准,以平均 表现为评价标准,给出准确率并且绘制出pr-curve,用来衡量模型的准确程度。
应用场景: 目前比较火热的应用场景诸如 自动驾驶、 增强显示、机器人抓取 等一系列需要对场景感知的场景。
3D物体检测的历史
template -baced 先给一个模板,然后把场景里的物体在模板中识别出来, 有点是可以识别特定的物体,如场景中输入好的马里奥,缺点有很多,如智能识别单一物体、运算量非常大、不具备智能性等
ckustering-baced 先对场景进行分隔,然后根据物体分割所得的东西得到一些物体快,然后在对小的物体块进行判断,是物体或者不是物体。但是和深度网络有区分的是,他不是通过网络输出的,而是通过特征识别的,缺点为大量的依靠手工的方法做识别,输入,因此智能型和可拓展性比较差
sliding shape baced 训练一个分类器,把分类器当成检测器,把空间中的每一个物体做分类,然后逐个检测,由于没有用深度学习,所以计算量很大,并且灵活性差
deep learning时代:
时代背景&基础:
- 3D传感器和大规模数据集产生
商用深度相机、lidar
KITTI、SUN RGB-D、shapenet、scannet等 - 2D物体检测的发展
从R-CNN===>FAST R-CNN===>FASTERR-CNN===>… - 3D 深度学习的崛起
如基于三维点云的深度学习网络等等
由此,在2016年,提出了基于深度学习的3d物体检测,可以作为里程碑似的标志,将深度学习用在了3D-CNN中
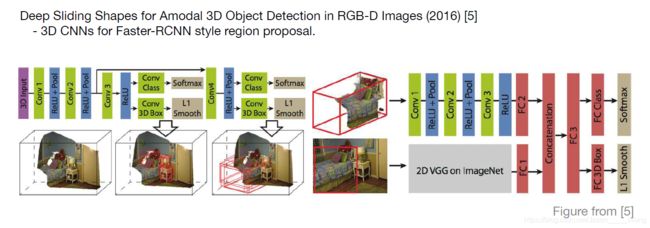
后续的初步思路是先将3D化为2D
主要分为三个思路
1.Frustum Proposal-用2D 的方法解决3D的问题
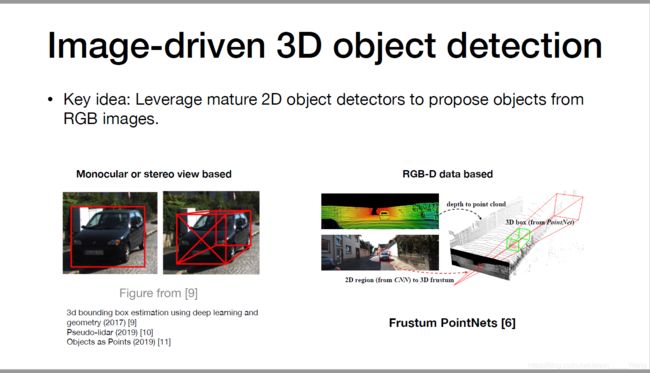
缺点:3D 的精度很难大大偶特别高,由此提出了基于RGB-D的工作 如frustum pointnet
输入:RGB-D图像
方法:将2D图像和三维点云拟合
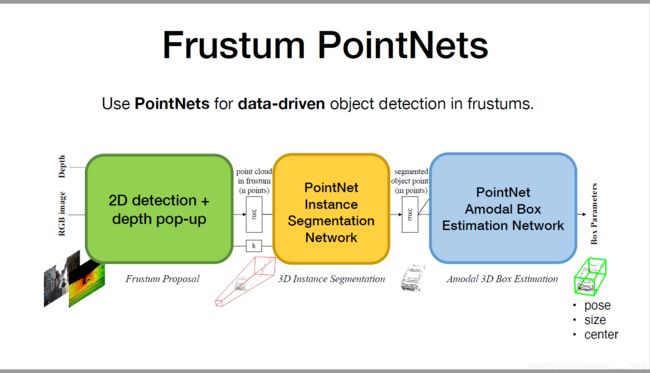
在进行实例分割时,基于2D 的深度物体分割的结果要显著比3D分割的效果更差。

局限性:
- 同一个视锥中只能检测一个物体
- 是基于2D 的分割,因此如果2D没有标记出来,是不会通过点云检测的
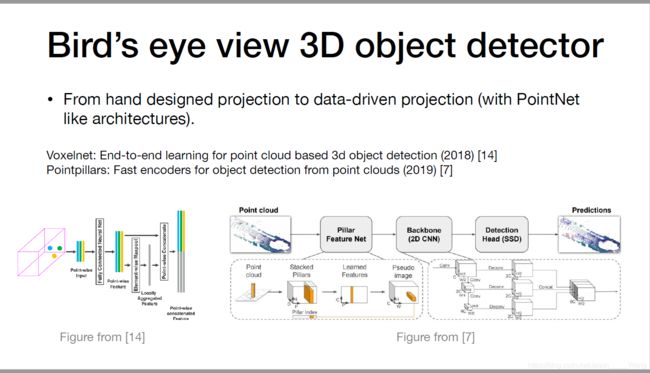
2、 用降维的方法解决3D learning问题
即把三维的图像用鸟瞰图的方法压缩为2维然后用2维方法进行处理
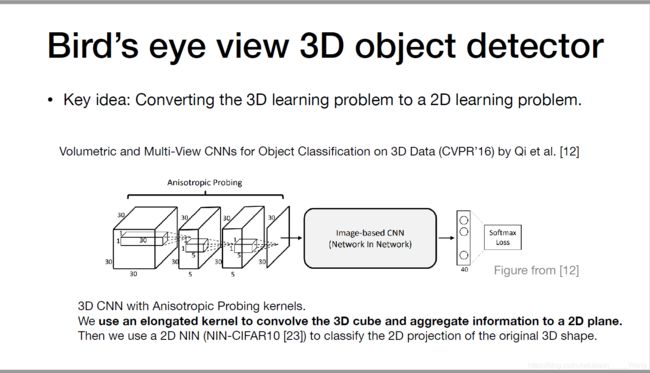
代表性的网络有:
3. 直接利用点云的稀疏性进行检测
因为点云只存在在物体表面,因此在三维空间中也是有稀疏性

重点介绍:Deep Hough Voting for 3D Object Detection in Point Clouds (ICCV 2019
一种基于voting 的思路
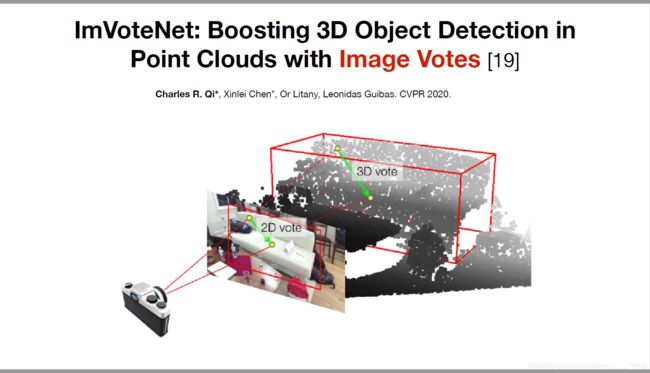
进一步结合2D的vote:
对未来3D物体检测发展方向的预测
-
输入端: 可以是更加多模态的信息,如RGB、雷达、slam 或是甚至有时间维度的信号
-
交叉领域 :从机器学习的领域来看3D检测: 如无监督学习;自标注、若标注 或和其他问题结合的互相监督模式 以及持续学习的模式
-
3D视觉在机器人领域的检测 如物体检测、6D位姿估计等 或是基于深度学习的模板检测
-
困难点: 如这档情况 肠胃情况 极端情况 或者没有3D数据的检测等
总结
答疑&求学经历
回答了一些相关的问题,然后简单的介绍了一下科研经历
科研经验与经历:
1.选择问题非常重要,是博士和研究员最终要的能力,问题如果选好了,就成功了一半,另外数据和matric处理好也非常重要,模型知识表达的一个方法。
2.如何选题?1。选到关键节点 2。 从横向比较获得启发 3。从工程实践中总结
选择尽早发现,在技术较为成熟的时候进入这个领域
横向比较,在相关领域或者类似领域发散思路,需要将方法进行前移
工程实践中会遇到很多实际的问题,可以考虑将这些问题抽象为实际问题(有机会应该多去好公司实习)
3.快速调整方向(选题)
如果选题遇到太难或者有什么壁垒时候,需要快速做出调整,不建议在一个方向上面死磕,而是应该正在项目经历和积累中思考未来的选题。
4.扎实的工程能力必不可少(涉及到迭代速度) 能够正确的实现已有的想法,并且快速迭代。
最有效的方法是跟随有经验的人一起学,或者把握课程或实习里面的锻炼机会,做到练中学
5.在实际工程项目的过程中要注重细节工程能力的积累,不要轻易放过细节,这会产生复利效应,在宏观上可以让项目速度越做越快,极快的积累经验
6.科研布局:点到线、线到面 将自己的知识脉络和项目串联起来,形成知识网
(下图为作者的知识网)

7.奥卡姆剃刀法则:追求简约而不是复杂
8.总结概括如下: