iOS 底层探索 - 类的加载
一、应用加载回顾
上一章我们对应用的加载有了初步的认识,我们知道了
- 系统调用
exec()会我们的应用映射到新的地址空间 - 然后通过
dyld进行加载、链接、初始化主程序和主程序所依赖的各种动态库 - 最后在
initializeMainExecutable方法中经过一系列初始化调用notifySingle函数,该函数会执行一个load_images的回调 - 然后在
doModinitFuntions函数内部会调用__attribute__((constructor))的c函数 - 然后
dyld返回主程序的入口函数,开始进入主程序的main函数
在 main 函数执行执行,其实 dyld 还会在流程中初始化 libSystem,而 libSystem 又会去初始化 libDispatch,在 libDispatch 初始化方法里面又会有一步 _os_object_init,在 _os_object_init 内部就会调起 _objc_init。而对于 _objc_init 我们还需要继续探索,因为这里面会进行类的加载等一系列重要的工作。
二、探索 _objc_init
首先来到 libObjc 源码的 _objc_init 方法处,你可以直接添加一个符号断点 _objc_init 或者全局搜索关键字来到这里:
void _objc_init(void)
{
static bool initialized = false;
if (initialized) return;
initialized = true;
// fixme defer initialization until an objc-using image is found?
environ_init();
tls_init();
static_init();
lock_init();
exception_init();
_dyld_objc_notify_register(&map_images, load_images, unmap_image);
}
我们接着进行分析:
- 判断是否已经初始化了,如果初始化过了,直接返回。
2.1 environ_init
接着来到 environ_init 方法内部:
我们可以看到,这里主要是读取影响 Runtime 的一些环境变量,如果需要,还可以打印环境变量帮助提示。
我们可以在终端上测试一下,直接输入 export OBJC_HELP=1:
可以看到不同的环境变量对应的内容都被打印出来了。
2.2 tls_init
接着来到 tls_init 方法内部:
void tls_init(void)
{
#if SUPPORT_DIRECT_THREAD_KEYS
_objc_pthread_key = TLS_DIRECT_KEY;
pthread_key_init_np(TLS_DIRECT_KEY, &_objc_pthread_destroyspecific);
#else
_objc_pthread_key = tls_create(&_objc_pthread_destroyspecific);
#endif
}
这里执行的是关于线程 key 的绑定,比如每线程数据的析构函数。
2.3 static_init
接着来到 static_init 方法内部:
/***********************************************************************
* static_init
* Run C++ static constructor functions.
* libc calls _objc_init() before dyld would call our static constructors,
* so we have to do it ourselves.
**********************************************************************/
static void static_init()
{
size_t count;
auto inits = getLibobjcInitializers(&_mh_dylib_header, &count);
for (size_t i = 0; i < count; i++) {
inits[i]();
}
}
这里会运行 C++ 的静态构造函数,在 dyld 调用我们的静态构造函数之前,libc 会调用 _objc_init,所以这里我们必须自己来做,并且这里只会初始化系统内置的 C++ 静态构造函数,我们自己代码里面写的并不会在这里初始化。
2.4 lock_init
接着来到 lock_init 方法内部:
void lock_init(void)
{
}
我们可以看到,这是一个空的实现。也就是说 objc 的锁是完全采用的 C++ 那一套的锁逻辑。
2.5 exception_init
接着来到 exception_init 方法内部:
/***********************************************************************
* exception_init
* Initialize libobjc's exception handling system.
* Called by map_images().
**********************************************************************/
void exception_init(void)
{
old_terminate = std::set_terminate(&_objc_terminate);
}
这里是初始化 libobjc 的异常处理系统,我们程序触发的异常都会来到:
我们可以看到 _objc_terminate 是未处理异常的回调函数,其内部逻辑如下:
- 检查是否是一个活跃的异常
- 如果是活跃的异常,检查是否是
OC抛出的异常 - 如果是
OC抛出的异常,调用uncaught_handeler回调函数指针 - 如果不是
OC抛出的异常,则继续C++终止操作
2.6 _dyld_objc_notify_register
接下来使我们今天探索的重点了: _dyld_objc_notify_register ,我们先看下它的定义:
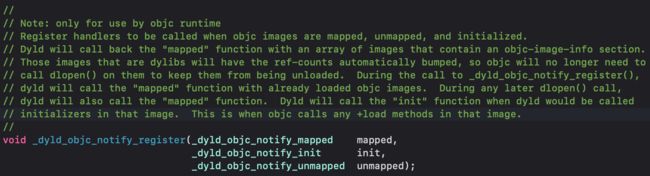
注意:仅供
objc运行时使用
当objc镜像被映射(mapped)、**卸载(unmapped)和初始化(initialized)**的时候,注册的回调函数就会被调用。
这个方法是dlyd中声明的,一旦调用该方法,调用结果会作为该函数的参数回传回来。比如,当所有的images以及section为objc-image-info被加载之后会回调mapped方法。
load方法也将在这个方法中被调用。
_dyld_objc_notify_register 方法的三个参数 map_images 、 load_images 、 unmap_image 其实都是函数指针:
![]()
这三个函数指针是在 dyld 中回调的,我们打开 dyld 的源码即可一探究竟,我们直接搜索 _dyld_objc_notify_register :
接着来到 dyld 的 registerObjCNotifiers 方法内部:


通过上面两张截图的内容说明在 registerObjCNotifiers 内部, libObjc 传过来的这三个函数指针被 dyld 保存在了本地静态变量中。换句话来说,最终函数指针是否能被调用,取决于这三个静态变量:
sNotifyObjCMappedsNotifyObjCInitsNotifyObjCUnmapped
我们注意到 registerObjCNotifiers 的 try-catch 语句中的 try 分支注释如下:
call ‘mapped’ function with all images mapped so far
调用mapped函数来映射所有的镜像
那么也就是说 notifyBatchPartial 里面会进行真正的函数指针的调用,我们进入这个方法内部:
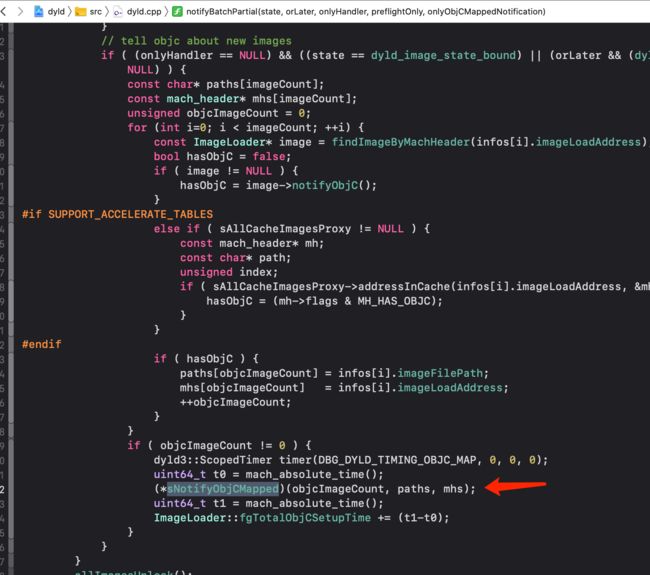
我们可以看到,在 notifyBatchPartial 方法内部,这里的注释:
tell objc about new images 告诉
objc镜像已经映射完成了
而图中箭头所指的地方正是 sNotifyObjCMapped 函数指针真正调用的地方。
弄清楚了三个函数指针是怎么调用的还不够,接下来我们要深入各个函数的内部看里面究竟做了什么样的事情。
三、探索 map_images
首先是 map_images ,我们来到它的实现:
/***********************************************************************
* map_images
* Process the given images which are being mapped in by dyld.
* Calls ABI-agnostic code after taking ABI-specific locks.
*
* Locking: write-locks runtimeLock
**********************************************************************/
void
map_images(unsigned count, const char * const paths[],
const struct mach_header * const mhdrs[])
{
mutex_locker_t lock(runtimeLock);
return map_images_nolock(count, paths, mhdrs);
}C
Process the given images which are being mapped in by dyld.
Calls ABI-agnostic code after taking ABI-specific locks.
处理由
dyld映射的给定镜像
取得特定于ABI的锁后,调用与ABI无关的代码。
这里会继续往下走到 map_images_nolock
map_images_nolock 内部代码十分冗长,我们经过分析之后,前面的工作基本上都是进行镜像文件信息的提取与统计,所以可以定位到最后的 _read_images :
这里进入
_read_images的条件是hCount大于 0,hCount表示的是Mach-O中header的数量
OK,我们的主角登场了, _read_images 和 lookupImpOrForward 可以说是我们学习 Runtime 和 iOS 底层里面非常重要的两个概念了, lookUpImpOrForward 已经探索过了,剩下的 _read_images 我们也不能落下。
3.1 _read_images 定义
Perform initial processing of the headers in the linked list beginning with headerList.
从headerList开始,对已经链接了的Mach-O镜像表中的头部进行初始化处理
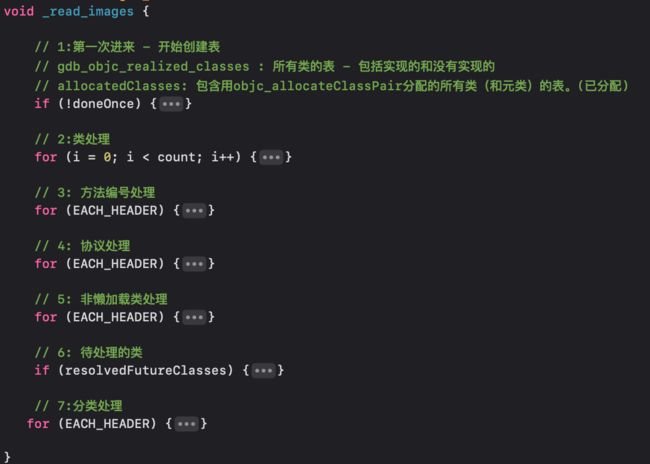
我们可以看到,整个 _read_images 有接近 400 行代码。我们不妨折叠一下里面的分支代码,然后总览一下:
通过折叠代码,以及日志打印提示信息,我们大致可以将 _read_images 分为下面几个流程:
3.2 _read_images 具体流程
doneOnce 流程
**
我们从第一个分支 doneOnce 开始,这个名词顾名思义,只会执行一次:
- 通过宏
SUPPORT_NONPOINTER_ISA判断当前是否支持开启内存优化的isa- 如果支持,则在某些条件下需要禁用这个优化
- 通过宏
SUPPORT_INDEXED_ISA判断当前是否是将类存储在isa作为类表索引- 如果是的话,再递归遍历所有的
Mach-O的头部,并且判断如果是Swift 3.0之前的代码,就需要禁用对isa的内存优化
- 如果是的话,再递归遍历所有的
- 通过宏
TARGET_OS_OSX判断是否是macOS执行环境 - 判断
macOS的系统版本,如果小于10.11则说明app太陈旧了,需要禁用掉non-pointer isa - 然后再遍历所有的
Mach-O的头部,判断如果有__DATA__,__objc_rawisa段的存在,则禁用掉non-pointer isa,因为很多新的app加载老的扩展的时候会需要这样的判断操作。
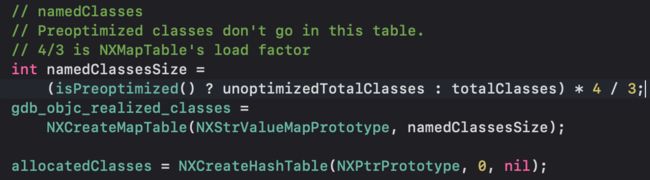
预先优化过的类不会加入到
gdb_objc_realized_classes这个哈希表中来,gdb_objc_realized_classes哈希表的装载因子为 0.75,这是一个经过验证的效率很高的扩容临界值。
- 加载所有类到类的
gdb_objc_realized_classes表中来
我们查看这个表的定义:

// This is a misnomer: gdb_objc_realized_classes is actually a list of
// named classes not in the dyld shared cache, whether realized or not.
这是一个误称:gdb_objc_realized_classes 表实际上存储的是不在
dyld共享缓存里面的命名类,无论这些类是否实现
除了 gdb_objc_realized_classes 表之外,还有一张表 allocatedClasses :

- 通过
objc_allocateClassPair开辟之后的类和元类存储的表(也就是说需要alloc)
其实 gdb_objc_realized_classes 对 allocatedClasses 是一种包含的关系,一张是类的总表,一张是已经开辟了内存的类表,
Discover classes 流程
Discover classes. Fix up unresolved future classes. Mark bundle classes.
发现类。修正未解析的future类,标记bundle类。
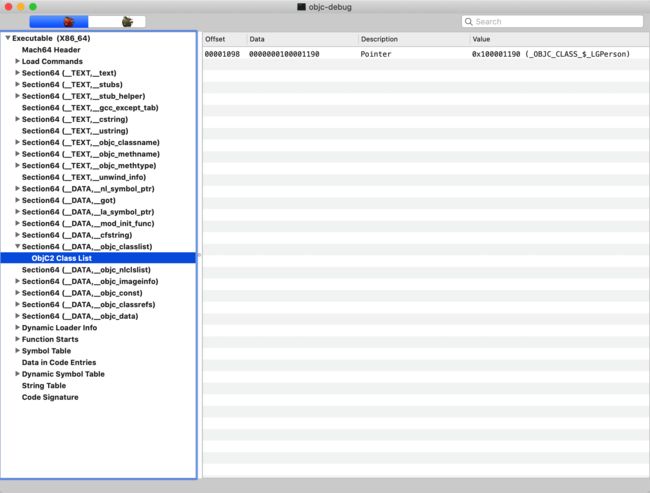
- 先通过
_getObjc2ClassList来获取到所有的类,我们可以通过MachOView来验证:
- 接着还是遍历所有的
Mach-O的header部分,然后通过mustReadClasses来判断哪些条件可以跳过读取类这一步骤 - 读取
header是否是Bundle - 读取
header是否开启了 预优化 - 遍历
_getObjc2ClassList取出的所有的类- 通过
readClass来读取类信息 - 判断如果不相等并且
readClass结果不为空,则需要重新为类开辟内存
- 通过
Fix up remapped classes 流程
修复 重映射类
类表和非懒加载类表没有被重映射 (也就是 _objc_classlist)
由于消息转发,类引用和父类引用会被重映射 (也就是 _objc_classrefs)
**
- 通过
noClassesRemapped方法判断是否有类引用(_objc_classrefs)需要进行重映射- 如果需要,则遍历
EACH_HEADER - 通过
_getObjc2ClassRefs和_getObjc2SuperRefs取出当前遍历到的Mach-O的类引用和父类引用,然后调用remapClassRef进行重映射
- 如果需要,则遍历
![]()
Fix up @selector references 流程
修正
SEL引用
- 操作前先加一个
selLock锁 - 然后遍历
EACH_HEADER- 如果开启了预优化,contiue 到下一个
Mach-O - 通过
_getObjc2SelectorRefs拿到所有的SEL引用 - 然后对所有的
SEL引用调用sel_registerNameNoLock进行注册
- 如果开启了预优化,contiue 到下一个
也就是说这一流程最主要的目的就是注册 SEL ,我们注册真正发生的地方: __sel_registerName ,这个函数如果大家经常玩 Runtime 肯定不会陌生:
我们简单分析一下 __sel_registerName 方法的流程:
- 判断是否要加锁
- 如果
sel为空,则返回一个空的SEL - 从
builtins中搜索,看是否已经注册过,如果找到,直接返回结果 - 从
namedSelectors哈希表中查询,找到了就返回结果 - 如果
namedSelectors未初始化,则创建一下这个哈希表 - 如果上面的流程都没有找到,则需要调用
sel_alloc来创建一下SEL,然后把新创建的SEL插入哈希表中进行缓存的填充
Fix up old objc_msgSend_fixup call sites 流程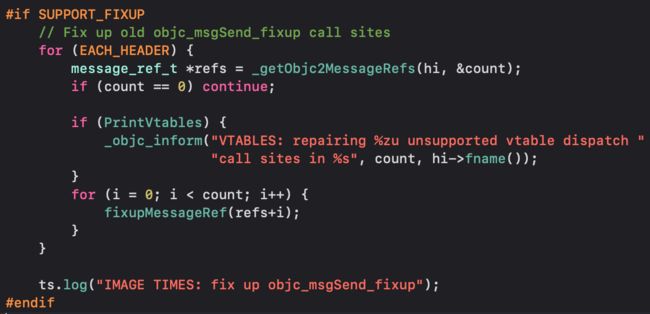
修正旧的
objc_msgSend_fixup调用
**
这个流程的执行前提是 FIXUP 被开启。
- 还是老套路,遍历
EACH_HEADER- 通过
_getObjc2MessageRefs方法来获取当前遍历到的Mach-O镜像的所有消息引用 - 然后遍历这些消息引用,然后调用
fixupMessageRef进行修正
- 通过
Discover protocols 流程
发现协议,并修正协议引用
**
Fix up @protocol references 流程
对所有的协议做重映射
**
Realize non-lazy classes 流程
初始化非懒加载类(
**+load**方法和静态实例)
Realize newly-resolved future classes 流程![]()
初始化新解析出来的
future类
**
Discover categories 流程
处理所有的分类,包括类和元类
**
到这里, _read_images 的流程就分析完毕,我们可以新建一个文件来去掉一些干扰的信息,只保留核心的逻辑,这样从宏观的角度来分析更直观:
Q & A 环节
Q:dyld主要逻辑是加载库,也就是镜像文件,但是加载完是怎么读取的呢?
A:_read_images是真正读取的地方Q:
SEL方法编号何时加载?
A:_read_images
3.3 read_class 分析
我们探索了 _read_images 方法的流程,接下来让我们把目光放到本文的主题 - 类的加载
既然是类的加载,那么我们在前面所探索的类的结构中出现的内容都会一一重现。
所以我们不妨直接进行断点调试,让我们略过其它干扰信息,聚焦于类的加载。
- 根据上一小节我们探索的结果,
doneOnce流程中会创建两个哈希表,并没有涉及到类的加载,所以我们跳过 - 我们来到第二个流程 - **类处理 **
我们在下图所示的位置处打上断点: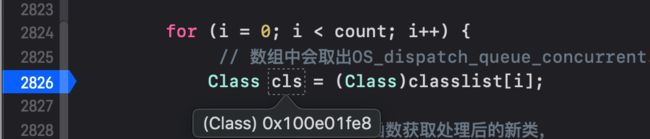
**
如上图所示,从 classList 中取出的 cls 只是一个内存地址,我们尝试通过 LLDB 打印 cls 的 clas_rw_t :
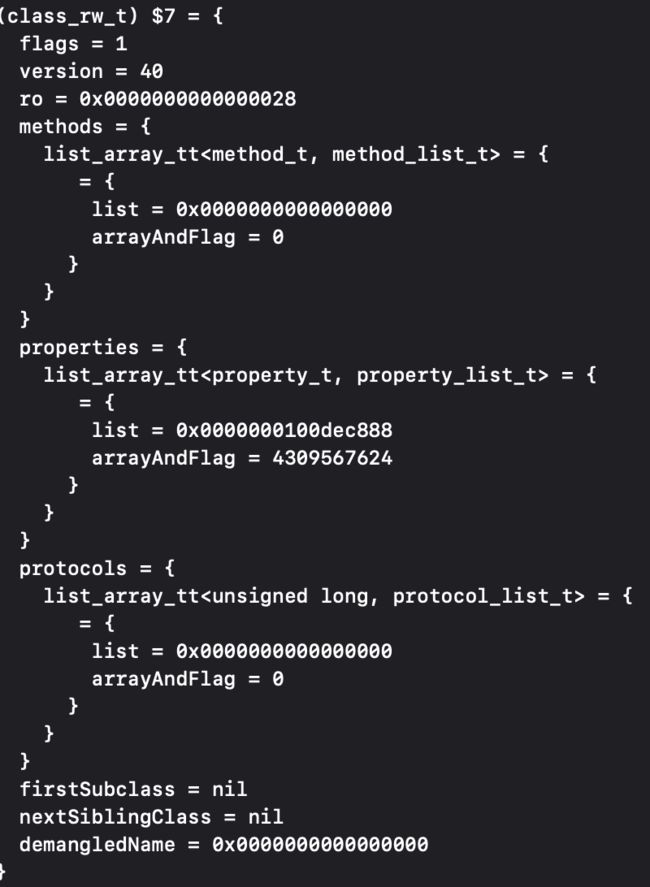
可以看到 cls 的属性、方法、协议以及类名都为空,说明这里类并没有被真正加载完成,我们接着聚焦到 read_class 函数上面,我们进入其内部实现,我们大致浏览之后会定位到如下图所示的代码:
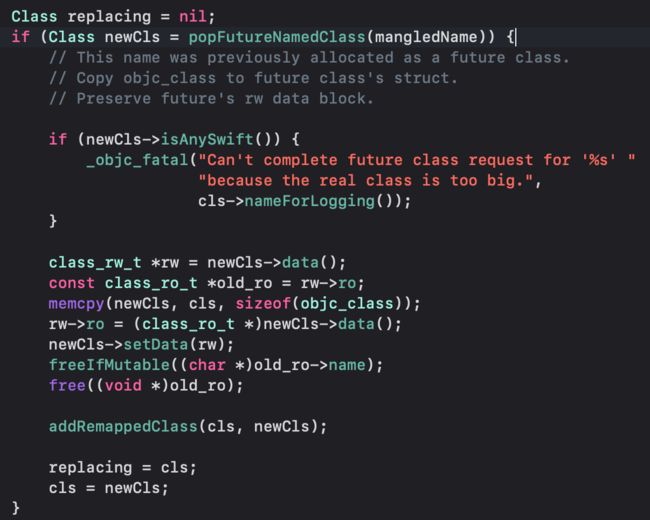
看起来类的信息在这里完成了加载,那么为了验证我们的猜想,直接断点调试一下但发现断点根本走不进来,原因在于这里的判断语句
if (Class newCls = popFutureNamedClass(mangledName))
判断当前传入的类的类名是否有 future 类的实现,但是我们刚才已经打印了,类名是空的,所以肯定不会执行这里。我们接着往下走:
- addNamedClass 内部其实是将
cls插入到gdb_objc_realized_classes表

- addclassTableEntry 内部是将
cls插入到allocatedClasses表
分析完 read_class ,我们回到 _read_images 方法
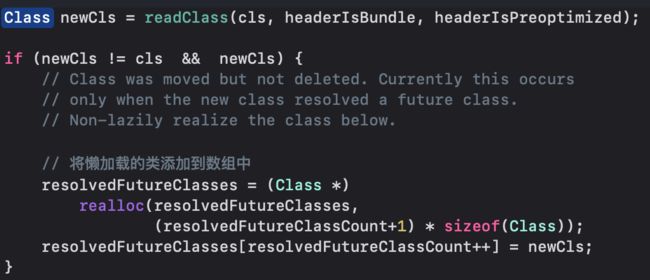
我们可以看到 read_class 返回的 newCls 会进行一个判断,判断与传入 read_class 之前的 cls 是否相等,而在 read_class 内部只有一个地方对类的内容进行了改动,但是我们刚才测试了是进不去的,所以这个 if 里面的内容我们可以略过,也就是说 resolvedFutureClasses 的内容我们都可以暂时略过。
总结一下 readClass :
- 判断是不是要后期处理的类
- 如果是的话,就取出后期处理的类,读取这个类的
data()类设置ro/rw
- 如果是的话,就取出后期处理的类,读取这个类的
- addNamedClass 插入总表
- addClassTableEntry 插入已开辟内存的类的表
3.4 realizeClassWithoutSwift 分析
通过分析 read_class ,我们可以得知,类已经被注册到两个哈希表中去了,那么现在一切时机都已经成熟了。但是我们还是要略过像 Fix up remapped classes 、 Fix up @selector references 、 fix up old objc_msgSend_fixup call sites 、 Discover protocols. Fix up protocol refs 、 Fix up @protocol references ,因为我们的重点是类的加载,我们最终来到了 Realize non-lazy classes (for +load methods and static instances) ,略去无关信息之后,我们可以看到我们的
主角 realizeClassWithoutSwift 闪亮登场了:
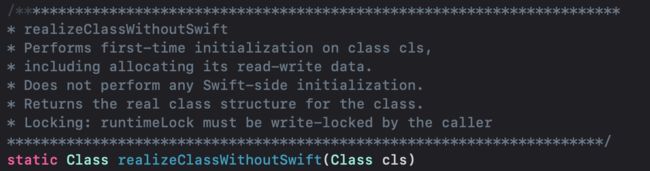
从方法的名称以及方法注释我们可以知道, realizeClassWithoutSwift 是进行类的第一次初始化操作,包括分配读写数据也就是我们常说的 rw ,但是并不会进行任何的 Swift 端初始化。我们直接聚焦下面的代码:
- 通过
calloc开辟内存空间,返回一个新的rw - 把
cls取出来的ro赋值给这个rw - 将
rw设置到cls身上
那么是不是说在这里 rw 就有值了呢,我们 LLDB 打印大法走起:

可以清楚地看到,此时 rw 还是为空,说明这里只是对 rw 进行了初始化,但是方法、属性、协议这些都没有被添加上。
我们接着往下走:
这里可以看到父类和元类都会递归调用 realizeClassWithoutSwift 来初始化各自的 rw 。为什么在类的加载操作里面要去加载类和元类呢?回忆一下类的结构,答案很简单,要保证 superclass 和 isa 的完整性,也就是保证类的完整性,
上面的截图就是最好的证明,初始化完毕的父类和元类被赋值到了类的 superclass 和 isa 上面。
接着往下走可以看到,不光要把父类关联到类上面,还要让父类知道子类的存在。
最后一行代码是 methodizeClass(cls) ,注释显示的是 attach categories ,附加分类到类?我们进入其内部实现一探究竟。
在探索 methodizeClass 前,我们先总结一下 realizeClassWithoutSwift :
- 读取
class的data() ro/rw赋值- 父类和元类实现
- supercls = realizeClassWithoutSwift(remapClass(cls->superclass))
- metacls = realizeClassWithoutSwift(remapClass(cls->ISA()))
- 父类和元类归属关系
- cls->superclass = supercls
- cls->initClassIsa(metacls)
- 将当前类链接到其父类的子类列表 addSubclass(supercls, cls)
3.5 methodizeClass 分析
对类的方法列表、协议列表和属性列表进行修正
附加category到类上面来
我们直接往下面走:
// Install methods and properties that the class implements itself.
method_list_t *list = ro->baseMethods();
if (list) {
prepareMethodLists(cls, &list, 1, YES, isBundleClass(cls));
rw->methods.attachLists(&list, 1);
}
- 从
ro中取出方法列表附加到rw上
property_list_t *proplist = ro->baseProperties;
if (proplist) {
rw->properties.attachLists(&proplist, 1);
}
- 从
ro中取出属性列表附加到rw上
protocol_list_t *protolist = ro->baseProtocols;
if (protolist) {
rw->protocols.attachLists(&protolist, 1);
}
- 从
ro中取出协议列表附加到rw上
category_list *cats = unattachedCategoriesForClass(cls, true /*realizing*/);
attachCategories(cls, cats, false /*don't flush caches*/);
- 从
cls中取出未附加的分类进行附加操作
我们可以看到,这里有一个操作叫 attachLists ,为什么方法、属性、协议都能调用这个方法呢?
我们可以看到,方法、属性、协议的数据结构都是一个二维数组,我们深入 attachLists 方法内部实现:
void attachLists(List* const * addedLists, uint32_t addedCount) {
if (addedCount == 0) return;
if (hasArray()) {
// many lists -> many lists
uint32_t oldCount = array()->count;//10
uint32_t newCount = oldCount + addedCount;//4
setArray((array_t *)realloc(array(), array_t::byteSize(newCount)));
array()->count = newCount;// 10+4
memmove(array()->lists + addedCount, array()->lists,
oldCount * sizeof(array()->lists[0]));
memcpy(array()->lists, addedLists,
addedCount * sizeof(array()->lists[0]));
}
else if (!list && addedCount == 1) {
// 0 lists -> 1 list
list = addedLists[0];
}
else {
// 1 list -> many lists
List* oldList = list;
uint32_t oldCount = oldList ? 1 : 0;
uint32_t newCount = oldCount + addedCount;
setArray((array_t *)malloc(array_t::byteSize(newCount)));
array()->count = newCount;
if (oldList) array()->lists[addedCount] = oldList;
memcpy(array()->lists, addedLists,
addedCount * sizeof(array()->lists[0]));
}
}
- 判断要添加的数量是否为 0,如果为 0,直接返回
- 判断当前调用
attachLists的list_array_tt二维数组有多个一维数组- 如果是,说明是多对多的关系
- 这里会通过
realloc对容器进行重新分配,大小为原来的大小加上新增的大小 - 然后通过
memmove把原来的数据移动到容器的末尾 - 最后把新的数据拷贝到容器的起始位置
- 如果调用
attachLists的list_array_tt二维数组为空且新增大小数目为 1,则直接取addedList的第一个list返回 - 如果当前调用
attachLists的list_array_tt二维数组只有一个一维数组- 如果是,说明是一对多的关系
- 这里会通过
realloc对容器进行重新分配,大小为原来的大小加上新增的大小 - 因为原来只有一个一维数组,所以直接赋值到新
Array的最后一个位置 - 然后把新数据拷贝到容器的起始位置
四、探索 load_images
我们接着探索 _dyld_objc_notify_register 的第二个参数 load_images ,这个函数指针是在什么时候调用的呢,同样的,我们接着在 dyld 源码中搜索对应的函数指针 sNotifyObjCInit :
可以看到,在 notifySingle 方法内部, sNotifyObjCInit 函数指针被调用了。根据我们上一篇文章探索 dyld 底层可以知道, _load_images 应该是对于每一个加载进来的 Mach-O 镜像都会递归调用一次。
我们来到 libObjc 源码中 load_images 的定义处:
处理由
dyld映射的给定镜像中的+load方法
- 判断是否有
load方法,如果没有,直接返回 - 搜索
load方法,具体实现通过prepare_load_methods - 调用
load方法,具体实现通过call_load_methods
4.1 prepare_load_methods 分析
从这个方法名称,我们猜测这里应该做的是 load 方法的一些预处理工作,让我们来到源码进行分析:
void prepare_load_methods(const headerType *mhdr)
{
size_t count, i;
runtimeLock.assertLocked();
classref_t *classlist =
_getObjc2NonlazyClassList(mhdr, &count);
for (i = 0; i < count; i++) {
schedule_class_load(remapClass(classlist[i]));
}
category_t **categorylist = _getObjc2NonlazyCategoryList(mhdr, &count);
for (i = 0; i < count; i++) {
category_t *cat = categorylist[i];
Class cls = remapClass(cat->cls);
if (!cls) continue; // category for ignored weak-linked class
if (cls->isSwiftStable()) {
_objc_fatal("Swift class extensions and categories on Swift "
"classes are not allowed to have +load methods");
}
realizeClassWithoutSwift(cls);
assert(cls->ISA()->isRealized());
add_category_to_loadable_list(cat);
}
}
/***********************************************************************
* prepare_load_methods
* Schedule +load for classes in this image, any un-+load-ed
* superclasses in other images, and any categories in this image.
**********************************************************************/
// Recursively schedule +load for cls and any un-+load-ed superclasses.
// cls must already be connected.
static void schedule_class_load(Class cls)
{
if (!cls) return;
assert(cls->isRealized()); // _read_images should realize
if (cls->data()->flags & RW_LOADED) return;
// Ensure superclass-first ordering
schedule_class_load(cls->superclass);
add_class_to_loadable_list(cls);
cls->setInfo(RW_LOADED);
}
/***********************************************************************
* add_class_to_loadable_list
* Class cls has just become connected. Schedule it for +load if
* it implements a +load method.
**********************************************************************/
void add_class_to_loadable_list(Class cls)
{
IMP method;
loadMethodLock.assertLocked();
method = cls->getLoadMethod();
if (!method) return; // Don't bother if cls has no +load method
if (PrintLoading) {
_objc_inform("LOAD: class '%s' scheduled for +load",
cls->nameForLogging());
}
if (loadable_classes_used == loadable_classes_allocated) {
loadable_classes_allocated = loadable_classes_allocated*2 + 16;
loadable_classes = (struct loadable_class *)
realloc(loadable_classes,
loadable_classes_allocated *
sizeof(struct loadable_class));
}
loadable_classes[loadable_classes_used].cls = cls;
loadable_classes[loadable_classes_used].method = method;
loadable_classes_used++;
}
- 首先通过
_getObjc2NonlazyClassList获取所有已经加载进去的类列表 - 然后通过
schedule_class_load遍历这些类- 递归调用遍历父类的
load方法,确保父类的load方法顺序排在子类的前面 - 通过
add_class_to_loadable_list, 把类的load方法存在loadable_classes里面
- 递归调用遍历父类的
- 完成
schedule_class_load之后,通过_getObjc2NonlazyCategoryList取出所有分类数据 - 然后遍历这些分类
- 通过
realizeClassWithoutSwift来防止类没有初始化,如果已经初始化了则不影响 - 通过
add_category_to_loadable_list,加载分类中的load方法到loadable_categories里面 
- 通过
4.2 call_load_methods 分析
通过名称我们可以知道 call_load_methods 应该就是 load 方法被调用的地方了。我们直接看源码:
void call_load_methods(void)
{
static bool loading = NO;
bool more_categories;
loadMethodLock.assertLocked();
// Re-entrant calls do nothing; the outermost call will finish the job.
if (loading) return;
loading = YES;
void *pool = objc_autoreleasePoolPush();
do {
// 1. Repeatedly call class +loads until there aren't any more
while (loadable_classes_used > 0) {
call_class_loads();
}
// 2. Call category +loads ONCE
more_categories = call_category_loads();
// 3. Run more +loads if there are classes OR more untried categories
} while (loadable_classes_used > 0 || more_categories);
objc_autoreleasePoolPop(pool);
loading = NO;
}
call_load_methods
调用类和类别中所有未决的+load方法
类里面+load方法是父类优先调用的
而在父类的+load之后才会调用分类的+load方法
- 通过
objc_autoreleasePoolPush压栈一个自动释放池 do-while循环开始- 循环调用类的
+load方法直到找不到为止 - 调用一次分类中的
+load方法
- 循环调用类的
- 通过
objc_autoreleasePoolPop出栈一个自动释放池
五、总结
至此, _objc_init 和 _dyld_objc_notify_register 我们就分析完了,我们对类的加载有了更细致的认知。 iOS 底层有时候探索起来确实很枯燥,但是如果能找到高效的方法以及明确自己的所探索的方向,会让自己从宏观上重新审视这门技术。是的,技术只是工具,我们不能被技术所绑架,我们要做到有的放矢的去探索,这样才能事半功倍。