Harris算子原理以及python实现
(一)Harris算子的实现
本系列研究的是自适应超参数估计的Harris算子
学习过程主要分为一下几部分:
- Harris算子的实现
- 学习随机过程和优化估计理论 论文研读,调研相关研究文献,了解国内外研究现状
- 采集超参数与图像局部多尺度之间的关系,并在此基础上建立统计模型,实现参数优化选择
- (时间空余情况下)学习工具matlab
文章目录
- (一)Harris算子的实现
- 前言
- 一、Harris算子的前身Moravec算子
- 二、Harris算子原理实现
-
- 1.Moravec算子的不足
- 2.Sobel
- 3.角点响应
- 4.Harris算子的python实现
- 总结
前言
特征点检测广泛应用到目标匹配,目标跟踪,三维重建等应用中,在进行目标建模时会对图像进行目标特征的提取,常用的有颜色,角点,特征点,轮廓,纹理等特征。而下面学习常用的特征点检测。 总结一下提取特征点的作用: 1. 运动目标跟踪 2. 物体识别 3. 图像配准 4. 全景图像拼接 5. 三维重建 而一种重要的点特征就是角点,本文就学习基于角点检测的算法:Harris角点检测一、Harris算子的前身Moravec算子
E ( u , v ) = ∑ x , y w ( x , y ) [ I ( x + u , x + y ) − I ( x , y ) ] 2 E(u,v) = \sum_{x,y} w(x,y)[I(x+u,x+y)-I(x,y)]^2 E(u,v)=∑x,yw(x,y)[I(x+u,x+y)−I(x,y)]2
- u,v - 水平、竖直方向的偏移
- x,y - 窗口的中心
- w(x,y) - 滤波函数
- I(x+u,x+y)、I(x,y) -分别为偏移点的灰度值、窗口中心点的灰度值
我们可以看到E(u,v)的值越大,越可能是角点
二、Harris算子原理实现
1.Moravec算子的不足
-
由于Moravec算子只考虑了4种方向,不具有旋转不变性,具有很大局限性,一张图片旋转个15°可能就被判定为不一样了;
-
harris算子运用全微分、泰勒展开的思想把方向细化了,考虑了多个方向。
公式推导:
E ( u , v ) = ∑ x , y w ( x , y ) [ I ( x + u , x + y ) − I ( x , y ) ] 2 E(u,v) = \sum_{x,y} w(x,y)[I(x+u,x+y)-I(x,y)]^2 E(u,v)=∑x,yw(x,y)[I(x+u,x+y)−I(x,y)]2
f ( x + u , y + v ) ≈ f ( x , y ) + u f x ( x , y ) + v f y ( x , y ) f(x+u,y+v) \approx f(x,y) + uf_{x}(x,y) +vf_{y}(x,y) f(x+u,y+v)≈f(x,y)+ufx(x,y)+vfy(x,y)⟹ \Longrightarrow ⟹
E ( u , v ) = ∑ x , y w ( x , y ) ( u 2 I x 2 + 2 u v I x I y + v 2 I y 2 ) E(u,v) = \sum_{x,y} w(x,y)(u^2I_{x}^2+2uvI_{x}I_{y}+v^2I_{y}^2) E(u,v)=∑x,yw(x,y)(u2Ix2+2uvIxIy+v2Iy2) -
I x I_{x} Ix - 图像的水平梯度,即I(x+u,y+v)对x求偏导
-
I y I_{y} Iy - 图像的垂直梯度,即I(x+u,y+v)对y求偏导
我们将用梯度算子Sobel来算梯度
⟹ \Longrightarrow ⟹该公式可以进一步化为矩阵形式:
E ( u , v ) = [ u , v ] ( ∑ w ( x , y ) [ I x 2 I x I y I x I y I y 2 ] ) [ u , v ] T E(u,v) = [u,v]( \sum w(x,y) \left[{I_{x}^2 \qquad I_{x}I_{y} \qquad I_{x}I_{y} \qquad I_{y}^2}\right])[u,v]^T E(u,v)=[u,v](∑w(x,y)[Ix2IxIyIxIyIy2])[u,v]T
这是一个22的矩阵*
⟹ \Longrightarrow ⟹简化中间括号里的内容,公式简化为如下形式:
E ( u , v ) = [ u , v ] M [ u , v ] T E(u,v) = [u,v]M[u,v]^T E(u,v)=[u,v]M[u,v]T
这是一个二次型
2.Sobel
代码如下:Dx = cv2.Sobel(img, cv2.CV_32F, 1, 0, ksize=ksize)
Dy = cv2.Sobel(img, cv2.CV_32F, 0, 1, ksize=ksize)
3.角点响应
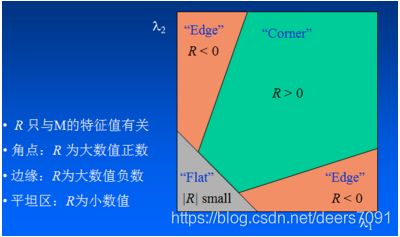
M为梯度的协方差矩阵,在实际应用中为了能够应用更好的编程,定义了角点响应函数R,通过判断R大小来判断像素是否为角点。
R取决于M的特征值,对于角点 |R| 很大,平坦的区域 |R| 很小,边缘的 R 为负值。
当然,这样计算量非常大,因为图像中的几乎每个点都需要进行一次特征值的计算,下面给出一个角点响应函数R的经验公式:
R = d e t M − α ( t r a c e M ) R = det M - \alpha(trace M) R=detM−α(traceM)
d e t M detM detM表示M的行列式, t r a c e M traceM traceM表示M的迹,R表示角点响应值, α \alpha α表示经验常数,一般在0.04~0.06之间取值。
判断准则:当R超过某个设定的阈值时,可认为是角点,反之,则不是。
4.Harris算子的python实现
核心函数实现:
- 计算图像两个方向的梯度(Sobel)
- 滤波
- 遍历边缘图像中的像素点
计算当前点的角点响应值R - 返回R矩阵
代码如下(示例):
import numpy as np
import cv2
#blocksize窗口大小;
#ksize算梯度的时候用的那个东西的大小,这里用的sobel是3*3
def cornerHarris(img, blocksize=2, ksize=3, k=0.04):
#下面是一个闭包
def _clacHarris(cov, k):
#numpy.zeros
#创建指定大小的数组,数组元素以 0 来填充:
result = np.zeros([cov.shape[0], cov.shape[1]], dtype=np.float32)
for i in range(cov.shape[0]):
for j in range(cov.shape[1]):
a = cov[i, j, 0]
b = cov[i, j, 1]
c = cov[i, j, 2]
result[i, j] = a*c-b*b-k*(a+c)*(a+c)
return result
#算图像竖直和水平方向的梯度
Dx = cv2.Sobel(img, cv2.CV_32F, 1, 0, ksize=ksize)
Dy = cv2.Sobel(img, cv2.CV_32F, 0, 1, ksize=ksize)
#img.shape 图像数组的大小(行、列、颜色通道)
cov = np.zeros([img.shape[0], img.shape[1], 3], dtype=np.float32)
for i in range(img.shape[0]):
for j in range(img.shape[1]):
cov[i, j, 0] = Dx[i, j]*Dx[i, j]
cov[i, j, 1] = Dy[i, j]*Dy[i, j]
#算块内的梯度和w(x,y),boxFilter换成高斯效果会好一点
#cov = cv2.boxFilter(cov, -1, (blocksize, blocksize), normalize=False)
#高斯滤波
cov = cv2.GaussianBlur(cov, (9, 9), 0)
return _clacHarris(cov, k)
if __name__ == '__main__':
img = cv2.imread('test1.png')
# 最近邻插值法缩放
# 缩放到原来的四分之一
img = cv2.resize(img, (0, 0), fx=0.5, fy=0.5, interpolation=cv2.INTER_NEAREST)
gray_img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)#把RGB图转成灰度图
result = cornerHarris(gray_img, 2, 3, 0.04)
#角点检测
pos = cv2.goodFeaturesToTrack(image=result, maxCorners=1000, qualityLevel=0.1, minDistance=1, useHarrisDetector=True, k=0.04)
for i in range(len(pos)):
#根据给定的圆心和半径等画圆cv2.circle(img, center, radius, color[, thickness[, lineType[, shift]]])
cv2.circle(img=img, center=(pos[i][0][0], pos[i][0][1]), radius=2, color=[0, 0, 255], thickness=3)
cv2.imshow('harris', img)
cv2.waitKey(0)
效果:


总结
该篇只是简单讲解了harris算子的原理以及实现,对于涉及到的Sobel函数、滤波函数、高斯函数原理都未详细涉及,后续会补充。
参考链接: OpenCV计算机视觉学习(13)——图像特征点检测(Harris角点检测,sift算法).