读书笔记-卷积神经网络
文章目录
- 1. 从全连接层到卷积
-
- 1.1 平移不变性
- 1.2 局部性
- 2. 图像卷积
-
- 2.1 卷积计算图示
- 2.2 学习卷积核
- 2.3 小结
- 3. 填充和步幅
-
- 3.1 填充
- 3.2 填充 - Pytorch
- 3.3 步幅 stride
- 4. 多输入和多输出通道
-
- 4.1 多通道
- 4.2 多输入通道 -> 单输出通道
- 5. 汇聚层
- 6. 卷积神经网络 LeNet
1. 从全连接层到卷积
因为我们遵循平移不变形和局部性,所以我们在全连接层的基础上形成了卷积神经网络,故卷积神经网络是一种特殊的全连接层。
1.1 平移不变性
不管检测对象出现在图像的哪个位置,神经网络的前几层应该对相同的图像区域具有相似的反应。
我们定义两个变量:
- [ X ] i , j [X]_{i,j} [X]i,j:表示输入图像的中位置 (i,j) 的像素
- [ H ] i , j [H]_{i,j} [H]i,j:表示隐藏的中位置 (i,j) 的像素
为了使每个隐藏神经元都能接收到每个输⼊像素的信息,我们将参数从权重矩阵(如同我们先前在多层感知机中所做的那样)替换为四阶权重张量 W。假设 U 包含偏置参数,我们可以将全连接层形式化地表⽰为:
[ H ] i , j = [ U ] i , j + ∑ k ∑ l [ W ] i , j , k , l [ X ] k , l (1) [H]_{i,j}=[U]_{i,j}+\sum_k\sum_l[W]_{i,j,k,l}[X]_{k,l}\tag1 [H]i,j=[U]i,j+k∑l∑[W]i,j,k,l[X]k,l(1)
[ H ] i , j = [ U ] i , j + ∑ a ∑ b [ V ] i , j , a , b [ X ] i + a , j + b (2) [H]_{i,j}=[U]_{i,j}+\sum_a\sum_b[V]_{i,j,a,b}[X]_{i+a,j+b}\tag2 [H]i,j=[U]i,j+a∑b∑[V]i,j,a,b[X]i+a,j+b(2)
从 W到V之间的转换只是形式的转换,因为在这两个四阶张量的元素之间存在一一对应的关系,我们只需重新索引下标(k,l);k=i+a;l=j+b;因此可得如下:
[ V ] i , j , a , b = [ W ] i , j , i + a , j + b (3) [V]_{i,j,a,b}=[W]_{i,j,i+a,j+b}\tag{3} [V]i,j,a,b=[W]i,j,i+a,j+b(3)
索引 a,b 通过在正偏移和负偏移之间移动覆盖整个图像。对于隐藏表示中任意给定位置 (i,j)处的像素值 [ H ] i , j [H]_{i,j} [H]i,j,可以通过在 x 中以 (i,j) 为中心对像素进行加权求和得到,加权使用的权重为 [ V ] i , j , a , b [V]_{i,j,a,b} [V]i,j,a,b,平移不变性指的是在检测对象在输入 X 中的平移,应该仅仅导致隐藏表示 H中的平移。也就是 U 和 V实际上不依赖 i,j 的值。数学可表达为:
[ V ] i , j , a , b = [ V ] a , b (4) [V]_{i,j,a,b}=[V]_{a,b}\tag{4} [V]i,j,a,b=[V]a,b(4)
其中 U 可以看作是常数 u.则可以表示如下:
[ H ] i , j = u + ∑ a ∑ b [ V ] a , b [ X ] i + a , j + b (5) [H]_{i,j}=u+\sum_a\sum_b[V]_{a,b}[X]_{i+a,j+b}\tag{5} [H]i,j=u+a∑b∑[V]a,b[X]i+a,j+b(5)
上述为卷积,表示的是使用系数 [ V ] a , b [V]_{a,b} [V]a,b对位置 [i,j] 附近的像素(i+a,j+b)进行加权得到 [ H ] i , j [H]_{i,j} [H]i,j。因为卷积考虑到局部性和平移不变性,所以参数表示上小了很多,是巨大的进步,但是其本质上还是来自全连接层。
1.2 局部性
局部性指的是我们卷积只对局部部分进行加权计算,而不考虑局部以外的值。假设局部区间为△,我们希望: ∣ a ∣ > △ |a|>△ ∣a∣>△或者 ∣ b ∣ > △ |b|>△ ∣b∣>△时,其训练参数 [ V ] a , b = 0 [V]_{a,b}=0 [V]a,b=0,故卷积层表示如下:
[ H ] i , j = u + ∑ a = − △ △ ∑ b = − △ △ [ V ] a , b [ X ] i + a , j + b (6) [H]_{i,j}=u+\sum_{a=-△}^{△}\sum_{b=-△}^{△}[V]_{a,b}[X]_{i+a,j+b}\tag{6} [H]i,j=u+a=−△∑△b=−△∑△[V]a,b[X]i+a,j+b(6)
2. 图像卷积
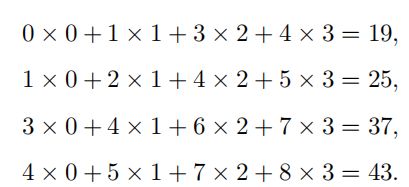
2.1 卷积计算图示

2.2 学习卷积核
关于卷积核的学习,详见下述链接。
深度学习到底是学习了什么?卷积核学习思考
2.3 小结
- 二维卷积层的核心计算为二维互相关计算,跟数学上的卷积计算有所差别
- 我们可以通过卷积核计算来对图像进行不同的处理,如锐化,高斯处理等
- 我们可以通过输入数据X和最终数据Y,通过深度学习来学习到卷积核的值
- 当需要检测输入特征中更广阔的区域,我们需要设计更深的网络。
3. 填充和步幅
3.1 填充
填充的意义在于,当我们的卷积核的大小大于1的时候,我们总会丢失部分的边缘像素,当神经网络比较浅的时候,我们可能看不出来。但当我们的网络非常深的时候,那么最终我们就会丢失掉很多信息,所以我们需要填充输入的矩阵。
- 填充方式,对称填充

如果我们添加 p h p_h ph行来填充(一半在顶部,一半在底部),添加 p w p_w pw列(一半在最左列,一半在最右列),输出形状为:
( n h − k h + p h + 1 ) × ( n w − k w + p w + 1 ) (7) (n_h-k_h+p_h+1)\times(n_w-k_w+p_w+1)\tag{7} (nh−kh+ph+1)×(nw−kw+pw+1)(7)
- 注:
n h : 输 入 矩 阵 行 数 ; k h : 卷 积 核 行 数 ; p h : 填 充 的 行 数 n_h:输入矩阵行数;k_h:卷积核行数;p_h:填充的行数 nh:输入矩阵行数;kh:卷积核行数;ph:填充的行数
n w : 输 出 矩 阵 列 数 ; k w : 卷 积 核 列 数 ; p w : 填 充 的 列 数 n_w:输出矩阵列数;k_w:卷积核列数;p_w:填充的列数 nw:输出矩阵列数;kw:卷积核列数;pw:填充的列数
我们知道输入矩阵 X 的大小为 ( n h , n w ) (n_h,n_w) (nh,nw),输出矩阵 Y 的大小为 ( n h − k h + p h + 1 ) × ( n w − k w + p w + 1 ) (n_h-k_h+p_h+1)\times(n_w-k_w+p_w+1) (nh−kh+ph+1)×(nw−kw+pw+1);为了保证输出大小和输入大小不变,我们通常假设填充如下:
− k h + p h + 1 = 0 ; − k w + p w + 1 = 0 (8) -k_h+p_h+1=0;-k_w+p_w+1=0\tag{8} −kh+ph+1=0;−kw+pw+1=0(8)
- 整理可得如下:
p h = k h − 1 ; p w = k w − 1 (9) p_h=k_h-1;p_w=k_w-1\tag{9} ph=kh−1;pw=kw−1(9)
3.2 填充 - Pytorch
- pytorch
在 Pytorch 二维卷积 nn.Conv2d中的参数 padding 值是单边填充量,比如
conv2d = nn.Conv2d(1, 1, kernel_size=3, padding=1)
那么输入矩阵 X 的填充是 顶部 1,底部 1,所以输出矩阵大小应该为
( n h − k h + 2 ∗ p h + 1 ) × ( n w − k w + 2 ∗ p w + 1 ) (10) (n_h-k_h+2*p_h+1)\times(n_w-k_w+2*p_w+1)\tag{10} (nh−kh+2∗ph+1)×(nw−kw+2∗pw+1)(10)
代入可得:
( n h − 3 + 2 ∗ 1 + 1 ) × ( n w − 3 + 2 ∗ 1 + 1 ) (11) (n_h-3+2*1+1)\times(n_w-3+2*1+1)\tag{11} (nh−3+2∗1+1)×(nw−3+2∗1+1)(11)
输出矩阵Y的形状如下,这样输入矩阵X和输出矩阵Y的大小不变
n h × n w (12) n_h\times n_w\tag{12} nh×nw(12)
- 代码
# -*- coding: utf-8 -*-
# @Project: zc
# @Author: zc
# @File name: padding
# @Create time: 2021/12/4 15:56
# 1. 导入相关数据库
import torch
from torch import nn
from d2l import torch as d2l
# 2.矩阵大小计算
# 输入 conv2d: 卷积核,x :输入矩阵
# 返回 y:输出矩阵,y.shape :输出矩阵的形状
def comp_conv2d(conv2d, x):
# 将矩阵 x 加入批量大小和通道数:(批量大小,通道数,输入矩阵)
x = x.reshape((1, 1) + x.shape)
# 卷积计算
y = conv2d(x)
# 去掉矩阵中的 (批量大小,通道数)
y = y.reshape(y.shape[2:])
return y, y.shape
# 3. 定义二维卷积运算
conv2d = nn.Conv2d(1, 1, kernel_size=3, padding=1)
# 4. 获取卷积矩阵的填充值(padding) ,卷积核大小(kernel_size)
padding = conv2d.padding
kernel_size = conv2d.kernel_size
# 5. 初始化 x ,
x = torch.randn(8, 8)
x_shape = x.shape
# 6. 获取相关参数
n_h, n_w = x_shape[0], x_shape[1]
k_h, k_w = kernel_size[0], kernel_size[1]
p_h, p_w = padding[0], padding[1]
y_h, y_w = x_shape[0], x_shape[1]
# 7. 卷积计算,得到输出矩阵及形状
y, y_shape = comp_conv2d(conv2d, x)
# 8. 打印相关数据
print(f'x_shape={
x_shape},kernel_size={
kernel_size},padding={
padding},y_shape={
y_shape}')
print(f'{
y_h}:(y_h)={
n_h}:(n_h)-{
k_h}:(k_h)+{
2*p_h}:(2*p_h)+1')
print(f'{
y_w}:(y_w)={
n_w}:(n_w)-{
k_w}:(k_w)+{
2*p_w}:(2*p_w)+1')
- 结果
x_shape=torch.Size([8, 8]),kernel_size=(3, 3),padding=(1, 1),y_shape=torch.Size([8, 8])
8:(y_h)=8:(n_h)-3:(k_h)+2:(2*p_h)+1
8:(y_w)=8:(n_w)-3:(k_w)+2:(2*p_w)+1
3.3 步幅 stride
步幅指的是卷积核每次滑动元素的数量。步幅的作用是为了采样的压缩,以前是一步一步的移动卷积核,如果像素之间相似东西太多,我们其实没必要进行一步一步的移动采集,我们完全可以跳着采集嘛,所以一般步幅的作用为了压缩数据,步幅一般是2,比如,输入矩阵是(8,8),当我们的步幅stride = 2的时候,我们得到的矩阵大小一般是(4,4),具体公式如下:
- 输出矩阵:
⌊ ( n h − k h + p h + s h ) / s h ⌋ × ⌊ ( n w − k w + p w + s w ) / s w ⌋ (13) \lfloor (n_h-k_h+p_h+s_h)/s_h\rfloor \times \lfloor (n_w-k_w+p_w+s_w)/s_w\rfloor\tag{13} ⌊(nh−kh+ph+sh)/sh⌋×⌊(nw−kw+pw+sw)/sw⌋(13) - 设置卷积核大小
p h = k h − 1 ; p w = k w − 1 (14) p_h=k_h-1;p_w=k_w-1\tag{14} ph=kh−1;pw=kw−1(14) - 输出矩阵更新为:
⌊ ( n h + s h − 1 ) / s h ⌋ × ⌊ ( n w + s w − 1 ) / s w ⌋ (15) \lfloor (n_h+s_h-1)/s_h\rfloor \times \lfloor (n_w+s_w-1)/s_w\rfloor\tag{15} ⌊(nh+sh−1)/sh⌋×⌊(nw+sw−1)/sw⌋(15) - 一般能被整除,最后简化为:
( n h / s h ) × ( n w / s w ) (16) (n_h/s_h) \times (n_w/s_w)\tag{16} (nh/sh)×(nw/sw)(16)
4. 多输入和多输出通道
4.1 多通道
以前我们常常进行的是矩阵运算,其有长宽两个参数,一般为二维通道,当我们的图片是彩色的.而颜色是由RGB三种颜色组成的.所以每个RGB输入图像具有 3 × h × w 3 \times h \times w 3×h×w,那么这个3就是通道的意思。
4.2 多输入通道 -> 单输出通道
假设我们输入为 c i × n h × n w c_i\times n_h \times n_w ci×nh×nw;卷积核为 c i × k h × k w c_i \times k_h \times k_w ci×kh×kw,输出为 o h × o w o_h \times o_w oh×ow;为了保证单通道输出,我们可以将每个通道卷积计算出来的结果求和。具体如下
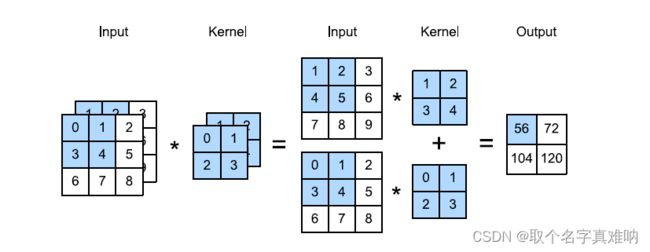
解析:
- input 输入大小为:2 x 3 x 3
- kernel 核大小为: 2 x 2 x 2
- padding 为:0;
- output 输出大小为: 1 x 2 x 2注: 3-2+1=2; 1 表示的是求和;
5. 汇聚层
6. 卷积神经网络 LeNet
注:本文代码来自 李沐的书籍,这里只做学习笔记。