【数字图像处理】OpenCV相机标定 计算内参外参
相机标定理论
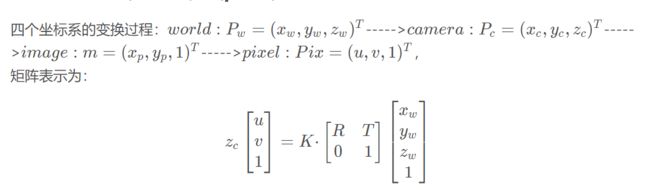
四个坐标轴的变换关系:

(1)从 world 到 camera
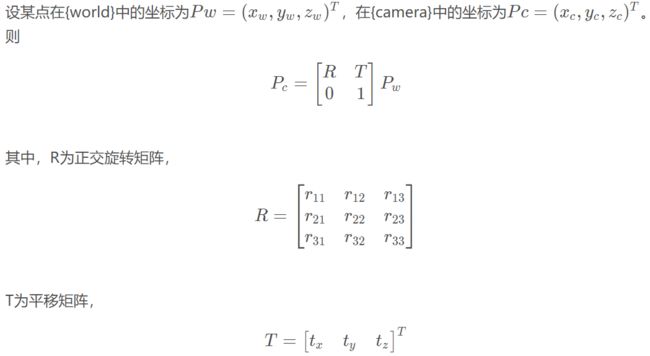
(2)从camera到image
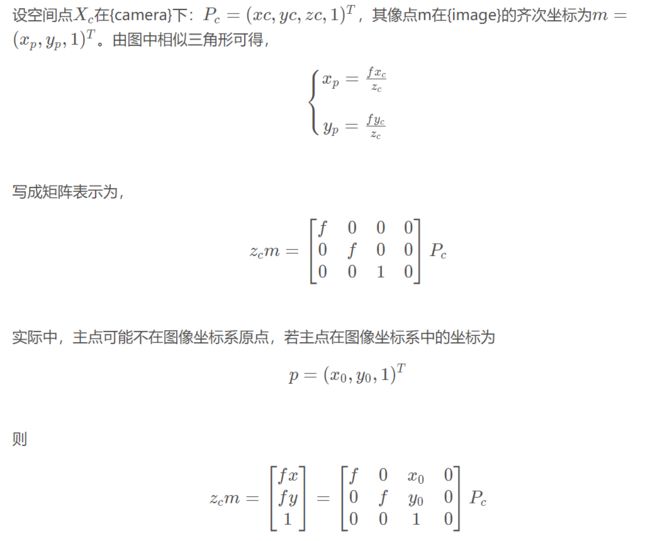
(3)从 image 到 pixel
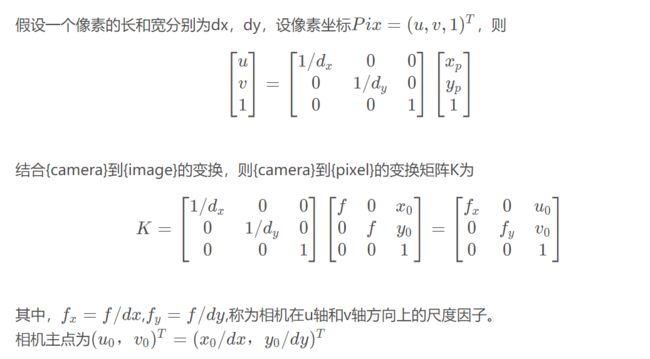
(4)从world 到 pixel

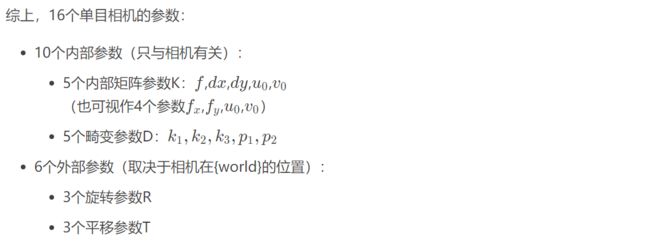
畸变参数(distortion parameters)
在几何光学和阴极射线管(CRT)显示中,畸变(distortion) 是对直线投影(rectilinear projection)的一种偏移。简单来说直线投影是场景内的一条直线投影到图片上也保持为一条直线。那畸变简单来说就是一条直线投影到图片上不能保持为一条直线了,这是一种光学畸变(optical aberration)。可能由于摄像机镜头的原因,这里不讨论,有兴趣的可以查阅光学畸变的相关的资料。
畸变一般可以分为两大类,包括径向畸变和切向畸变。主要的一般径向畸变有时也会有轻微的切向畸变。
径向畸变(Radial distortion)###
径向畸变的效应有三种,一种是桶形畸变(barrel distortion),另一种是枕形畸变(pincushion distortion),还有一种是两种的结合叫做胡子畸变(mustache distortion),从图片中可以很容易看出区别,具体见下图(图片来自wikipedia):

径向畸变可以用如下公式修正:
xdistorted=x(1+k1r2+k2r4+k3r6)ydistorted=y(1+k1r2+k2r4+k3r6)
切向畸变
xdistorted=x+[2p1xy+p2(r2+2x2)]ydistorted=y+[p1(r2+2y2)+2p2xy]
基于opencv的图像校准
具体程序参考
[email protected]:Yueyang123/calibrator.git
计算相机内参
采集图像
我这里因为不是uvc摄像头,是不支持UVC协议的摄像头,采用了自己写的摄像头接口进行的
采集,正常直接用opencv自带的VideoCapture直接采集就可以了
/*
* @Description:
* @Autor: YURI
* @Date: 2022-01-29 20:44:37
* @LastEditors: YURI
* @LastEditTime: 2022-01-30 03:02:58
*/
#include opencv_cap_picture 放在板端运行
采集出30张图像考下来备用
Matlab计算内参和畸变
直接而在MATLAB的Command Window里面输入cameraCalibrator即可调用标定应用。
计算出的结果中
里面的RadialDistortion对应k1,k2,k3设置为0了。 TangentialDistortion对应p1,p2。
IntrinsicMatrix对应内参,注意这个和OpenCV中是转置的关系,注意不要搞错。
手动找到像素点何其对应的世界坐标
用下面的程序找到两两对应的坐标
/*
* @Description: 这个程序主要是为了找匹配点的
* 将世界坐标和对应像素点记录下来
* @Autor: YURI
* @Date: 2022-01-30 01:28:32
* @LastEditors: YURI
* @LastEditTime: 2022-01-30 02:52:21
*/
#include 通过前面得到的内参和对应坐标计算外参
/**
* 640x680 UVC 参数
* 内参矩阵
* 927 0 0 927 0 378
* 0 922 0 0 922 181
* 378 181 1 --》 0 0 1
*
* 畸变参数:0.0814 1.059 0 -0.0249 0.035
*
* 参数点
* (20,20,-20) (161, 183)
* (-20,20,-20)(352 ,170)
* (0,40,-20) (250, 80)
* (20,40,-20) (155 ,80)
* (-20,40,-20) (350 ,77)
*
*
* 内参 :
[927, 0, 378;
0, 922, 181;
0, 0, 1]
外参R :
[-0.983137867886935, -0.0269591431329599, -0.1808677343482473;
0.05541797587717625, -0.986485208380106, -0.1541939739319782;
-0.1742664071942963, -0.1616172585115694, 0.9713449856126276]
外参T :
[-28.32676932096033;
15.3704959647409;
218.1288004110183]
畸变 :
[0.0814;
0;
0;
0;
0]
*
*/
#include 最后可以通过输入世界坐标,程序输出像素坐标,看一看标定是否成功,建议不要将畸变参数完全输入
输入前一个或前两个就可以了,不然似乎会出问题。