基于STM32的蓝牙物联网节点设计
基于STM32的蓝牙物联网节点设计
- 1.前言
- 2.过程记录
-
- 2.1 电路板设计
- 2.2 程序设计
- 结束语
1.前言
大三上学期我们就要做课程设计了,之前的学长学姐都是十个人一组,到我们老师觉得十个人太水就把我们弄成了三人一组,然后让我们用一个多月的时间去做物联网节点设计。
开始后一两天就给我们每组发了开发板,一款是普中的51单片机开发板,一款是正点原子的潘多拉开发板,然后就让我们自己选题开工了。我之前学STM32的时候买了几个核心板、蓝牙模块和TFT屏幕,然后就打算用手上有的东西区实现了。
程序写到一半,我们又去问了老师几个问题,老师跟我们讲说还要自己做电路设计,最少要有焊接过程,正好之前我还有PCB设计的一些经验,虽然不是很会,但当时觉得做一个这样的小板子应该不成问题。
最后就开始动手了。
Github地址:https://github.com/sin1111yi/STM32F1-HC05-board
2.过程记录
2.1 电路板设计
之前学STM32的时候,用的是野火的F103指南者开发板,又买了几个C8T6和RCT6的开发板。最初学STM32的动力也是在B站上看到别人的一个视频,自己做了双模的蓝牙键盘,当时觉得有点意思也想自己试试,然后就开始学这个了。
2.1.1 原理图设计
原理图做了好多参照(复制) ,最后得到了缝合怪开发板。因为是基于蓝牙的节点设计,所以选择直接板载蓝牙模块,然后就去参照了正点原子ATK-HC05的原理图。

把这个集成到电路板上就可以让老师比较信服这个是我们自己做的,因为当时板子做出来老师也对这个板子的来源有一点怀疑,当然最终还是相信了。
最后剩下的就是把别人的原理图照着画一遍,得到最终的原理图。
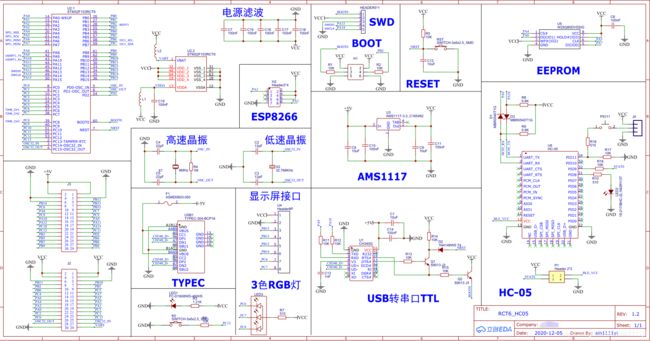
2.1.2 PCB设计
原理图用立创EDA画出来,然后用AutoCAD做了一个边框,EDA转换成PCB后导入边框层,最后排原件走线。唯一要注意的就是蓝牙模块天线要放在边缘,并且下面不要敷铜。


PCB就这样画好了,然后当然就是薅羊毛5元打样然后做SMT,做SMT的时候有的元件没有的话也只能自己买回来焊接。
成品做出来后就开始烧程序,最初上电的时候看上去都没有问题,蓝牙模块也正常运行了起来了,但是烧程序就执行不了,一直卡在HardFault_Handler()。做了一天debug,最后发现是BOOT0没有拉低,抱着死马当活马医的心态换了把它换成了磁珠,结果就好了。
实际上Type-C接口也是不能用的,所以我也没有去测试CH340部分能不能使用。

最终成品就是这样,也就是它陪着我走完了课程设计的这段路,也许下个学期还会继续用它。
2.2 程序设计
整个任务之前也说了是由三个人一起完成,我负责这个节点,其他两个人各负责一个节点,他们两个用学校发的51单片机开发板,我用上面做的这个板子。
设计上,我们打算做的是智能家居系统,本来的设想很宏大,结果实现起来都是在下位机出了问题,最后只能一直缩减,最后完全按照计划做出来的也只有上位机。
程序流程直接贴一个图
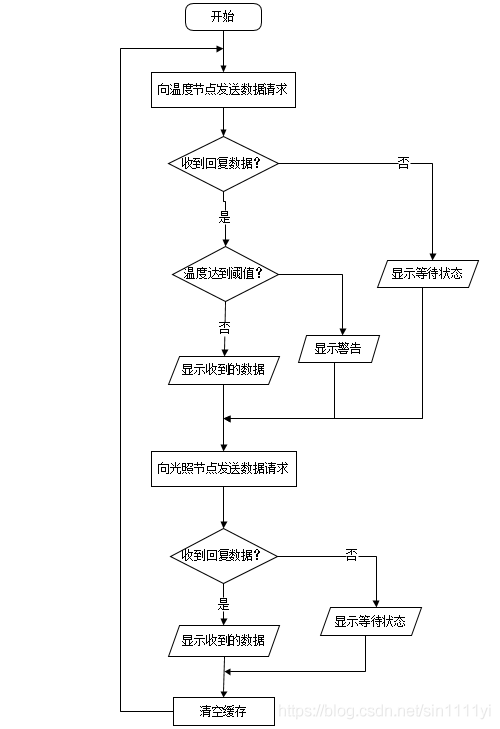
最后看指导书要求还能统计网络流量,就用TIM2做了一个定时,然后收发数据包都计数,两秒算一次就能得到网络内的数据流量。
代码上串口通信用了USART1和USART2,直接移植了野火的代码。滴答定时器也是移植,TFT显示也是移植,自己只写了几个函数让它可以做到自动换行和半屏清空,用来做分开显示。
main.c
#include stm32f10x_it.c
/* Includes ------------------------------------------------------------------*/
#include "stm32f10x_it.h"
#include "HC_05.h"
#include "Host_usart.h"
#include "RGB.h"
#include "TFT_LCD.h"
#include "General_TIM.h"
#include 结束语
体验还行,找队友一定要靠谱,这次也多亏了队友靠谱才能顺利完成。