1、前言
本文主要研究高通平台Camera驱动和HAL层代码架构,熟悉高通Camera的控制流程。
平台:Qcom-高通平台
Hal版本:【HAL1】
知识点如下:
从HAL层到driver层:研究Camera以下内容
1.打开(open)流程
2.预览(preview)流程
3.拍照(tackPicture)流程
2、Camera软件架构

由上图可以看出,Android Camera 框架是 client/service 的架构,
-
1.有两个进程:
client 进程:可以看成是 AP 端,主要包括 JAVA 代码与一些 native c/c++代码;
service 进 程:”属于服务端,是 native c/c++代码,主要负责和 linux kernel 中的 camera driver 交互,搜集 linuxkernel 中 cameradriver 传上来的数据,并交给显示系统SurfaceFlinger显示。
client 进程与 service 进程通过 Binder 机制通信, client 端通过调用 service 端的接口实现各个具体的功能。
2.最下面的是kernel层的驱动,其中按照V4L2架构实现了camera sensor等驱动,向用户空间提供/dev/video0节点,这些设备节点文件,把操作设备的接口暴露给用户空间。
3.在往上是HAL层,高通代码实现了对/dev/video0的基本操作,对接了android的camera相关的interface。
2.1 Camera的open流程
2.1.1 Hal层
Android中Camera的调用流程, 基本是 Java -> JNI -> Service -> HAL -> 驱动层。
frameworks/av/services/camera/libcameraservice/device1/CameraHardwareInterface.h
status_t initialize(CameraModule *module) {
···
rc = module->open(mName.string(), (hw_device_t **)&mDevice);
···
}
这里调用module->open开始调用到HAL层,那调用的是哪个方法呢?
我们继续往下看:
hardware/qcom/camera/QCamera2/HAL/wrapper/QualcommCamera.cpp
static hw_module_methods_t camera_module_methods = {
open: camera_device_open,
};
实际上是调用了camera_device_open函数,为了对调用流程更加清晰的认识,
我画了一张流程图(画图工具:processon):

open流程图已经很清晰明了,我们关注一些重点函数:
在HAL层的 module->open(mName.string(), (hw_device_t **)&mDevice)层层调用,最终会调用到函数mm_camera_open(cam_obj);
hardware/qcom/camera/QCamera2/HAL/core/src/QCameraHWI.cpp
QCameraHardwareInterface::QCameraHardwareInterface(int cameraId, int mode)
{
···
/* Open camera stack! */
mCameraHandle=camera_open(mCameraId, &mem_hooks);
//Preview
result = createPreview();
//Record
result = createRecord();
//Snapshot
result = createSnapshot();
/* launch jpeg notify thread and raw data proc thread */
mNotifyTh = new QCameraCmdThread();
mDataProcTh = new QCameraCmdThread();
···
}
分析:new QCameraHardwareInterface()进行初始化:主要做了以下动作:
- 1.打开camera
- 2.creat preview stream、record stream、snapshot stream
- 3.创建2个线程(jpeg notify thread和raw data proc thread)
hardware/qcom/camera/QCamera2/stack/mm-camera-interface/src/mm_camera.c
int32_t mm_camera_open(mm_camera_obj_t *my_obj)
{
···
my_obj->ctrl_fd = open(dev_name, O_RDWR | O_NONBLOCK);
···
}
在V4L2框架中,Camera被看做一个视频设备,使用open函数打开这个设备:这里以阻塞模式打开Camera。
1. 用非阻塞模式打开摄像头设备
cameraFd = open("/dev/video0", O_RDWR | O_NONBLOCK);
2. 如果用阻塞模式打开摄像头设备,上述代码变为:
cameraFd = open("/dev/video0", O_RDWR);
ps:关于阻塞模式和非阻塞模式
应用程序能够使用阻塞模式或非阻塞模式打开视频设备,如果使用非阻塞模式调用视频设备,
即使尚未捕获到信息,驱动依旧会把缓存(DQBUFF)里的东西返回给应用程序。
那么,接下来就会调用到Kernel层的代码
2.1.2Kernel层
kernel/drivers/media/platform/msm/camera_v2/msm.c
static struct v4l2_file_operations msm_fops = {
.owner = THIS_MODULE,
.open = msm_open,
.poll = msm_poll,
.release = msm_close,
.ioctl = video_ioctl2,
#ifdef CONFIG_COMPAT
.compat_ioctl32 = video_ioctl2,
#endif
};
实际上是调用了msm_open这个函数,我们跟进去看:
static int msm_open(struct file *filep)
{
···
/* !!! only ONE open is allowed !!! */
if (atomic_cmpxchg(&pvdev->opened, 0, 1))
return -EBUSY;
spin_lock_irqsave(&msm_pid_lock, flags);
msm_pid = get_pid(task_pid(current));
spin_unlock_irqrestore(&msm_pid_lock, flags);
/* create event queue */
rc = v4l2_fh_open(filep);
if (rc < 0)
return rc;
spin_lock_irqsave(&msm_eventq_lock, flags);
msm_eventq = filep->private_data;
spin_unlock_irqrestore(&msm_eventq_lock, flags);
/* register msm_v4l2_pm_qos_request */
msm_pm_qos_add_request();
···
}
分析:
通过调用v4l2_fh_open函数打开Camera,该函数会创建event队列等进行一些其他操作。
接下来我们跟着log去看:
camera open log
<3>[ 12.526811] msm_camera_power_up type 1
<3>[ 12.526818] msm_camera_power_up:1303 gpio set val 33
<3>[ 12.528873] msm_camera_power_up index 6
<3>[ 12.528885] msm_camera_power_up type 1
<3>[ 12.528893] msm_camera_power_up:1303 gpio set val 33
<3>[ 12.534954] msm_camera_power_up index 7
<3>[ 12.534969] msm_camera_power_up type 1
<3>[ 12.534977] msm_camera_power_up:1303 gpio set val 28
<3>[ 12.540162] msm_camera_power_up index 8
<3>[ 12.540177] msm_camera_power_up type 1
<3>[ ·
<3>[ ·
<3>[ ·
<3>[ 12.562753] msm_sensor_match_id: read id: 0x5675 expected id 0x5675:
<3>[ 12.562763] ov5675_back probe succeeded
<3>[ 12.562771] msm_sensor_driver_create_i2c_v4l_subdev camera I2c probe succeeded
<3>[ 12.564930] msm_sensor_driver_create_i2c_v4l_subdev rc 0 session_id 1
<3>[ 12.565495] msm_sensor_driver_create_i2c_v4l_subdev:120
<3>[ 12.565507] msm_camera_power_down:1455
<3>[ 12.565514] msm_camera_power_down index 0
分析:
最终就是调用msm_camera_power_up上电,msm_sensor_match_id识别sensor id,调用ov5675_back probe()探测函数去完成匹配设备和驱动的工作,msm_camera_power_down下电!
到此 我们的open流程就结束了!!!
2.2 Camera的preview流程
2.2.1 Hal层
hardware/qcom/camera/QCamera2/HAL/QCamera2HWI.cpp
int QCamera2HardwareInterface::startPreview()
{
···
int32_t rc = NO_ERROR;
···
rc = startChannel(QCAMERA_CH_TYPE_PREVIEW);
···
}
这里调用startChannel(QCAMERA_CH_TYPE_PREVIEW),开启preview流。
接来下看我画的一张流程图:(Hal层)

关注一些重点函数:
hardware/qcom/camera/QCamera2/HAL/QCameraChannel.cpp
int32_t QCameraChannel::start()
{
···
mStreams[i]->start();//流程1
···
rc = m_camOps->start_channel(m_camHandle, m_handle);//流程2
···
}
进入QCameraChannel::start()函数开始执行两个流程,分别是
mStreams[i]->start()和m_camOps->start_channel(m_camHandle, m_handle);
流程1:mStreams[i]->start()
1.通过mProcTh.launch(dataProcRoutine, this)开启新线程
2.执行CAMERA_CMD_TYPE_DO_NEXT_JOB分支,
3.从mDataQ队列中取出数据并放入mDataCB中,等待数据返回到对应的stream回调中去,
4.最后向kernel请求数据;
流程2:m_camOps->start_channel(m_camHandle, m_handle);
通过流程图,我们可以清晰的看到,经过一系列复杂的调用用,
最后在mm_camera_channel.c中
调用mm_channel_start(mm_channel_t *my_obj)函数,
来看mm_channel_start做了什么事情:
hardware/qcom/camera/QCamera2/stack/mm-camera-interface/src/mm_camera_channel.c
int32_t mm_channel_start(mm_channel_t *my_obj)
{
···
/* 需要发送cb,因此启动线程 */
/* 初始化superbuf队列 */
mm_channel_superbuf_queue_init(&my_obj->bundle.superbuf_queue);
/* 启动cb线程,通过cb调度superbuf中 */
snprintf(my_obj->cb_thread.threadName, THREAD_NAME_SIZE, "CAM_SuperBuf");
mm_camera_cmd_thread_launch(&my_obj->cb_thread,
mm_channel_dispatch_super_buf,
(void*)my_obj);
/* 启动 cmd 线程,作为superbuf接收数据的回调函数*/
snprintf(my_obj->cmd_thread.threadName, THREAD_NAME_SIZE, "CAM_SuperBufCB");
mm_camera_cmd_thread_launch(&my_obj->cmd_thread,
mm_channel_process_stream_buf,
(void*)my_obj);
/* 为每个strean分配 buf */
/*allocate buf*/
rc = mm_stream_fsm_fn(s_objs[i],
MM_STREAM_EVT_GET_BUF,
NULL,
NULL);
/* reg buf */
rc = mm_stream_fsm_fn(s_objs[i],
MM_STREAM_EVT_REG_BUF,
NULL,
NULL);
/* 开启 stream */
rc = mm_stream_fsm_fn(s_objs[i],
MM_STREAM_EVT_START,
NULL,
NULL);
···
}
过程包括:
- 1.创建cb thread,cmd thread线程以及
- 2.为每个stream分配buf
- 3.开启stream;
我们继续关注开启stream后的流程:
rc = mm_stream_fsm_fn(s_objs[i],MM_STREAM_EVT_START,NULL,NULL);
调用到
rc = mm_stream_fsm_reg(my_obj, evt, in_val, out_val)
hardware/qcom/camera/QCamera2/stack/mm-camera-interface/src/mm_camera_stream.c
int32_t mm_stream_fsm_reg(···)
{
···
case MM_STREAM_EVT_START:
rc = mm_stream_streamon(my_obj);
···
}
在mm_camera_stream.c中调用mm_stream_streamon(mm_stream_t *my_obj)函数.
向kernel发送v4l2请求,等待数据回调
int32_t mm_stream_streamon(mm_stream_t *my_obj)
{
···
enum v4l2_buf_type buf_type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
···
rc = ioctl(my_obj->fd, VIDIOC_STREAMON, &buf_type);
···
}
2.2.2 Kernel层
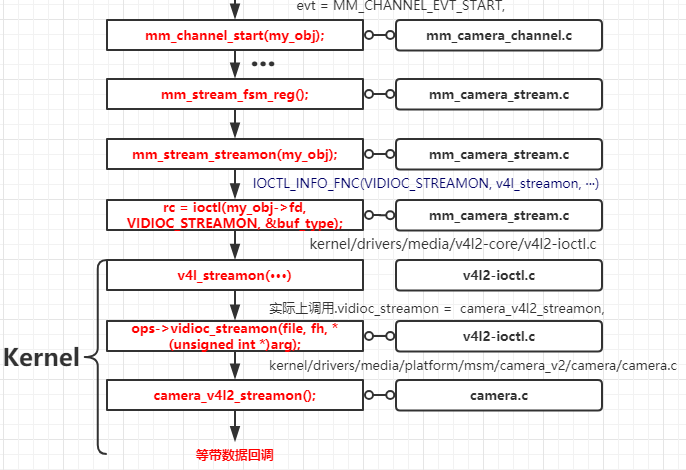
kernel/drivers/media/platform/msm/camera_v2/camera/camera.c
通过ioctl的方式,经过层层调用,最后调用到camera_v4l2_streamon();
static int camera_v4l2_streamon(struct file *filep, void *fh,
enum v4l2_buf_type buf_type)
{
struct v4l2_event event;
int rc;
struct camera_v4l2_private *sp = fh_to_private(fh);
rc = vb2_streamon(&sp->vb2_q, buf_type);
camera_pack_event(filep, MSM_CAMERA_SET_PARM,
MSM_CAMERA_PRIV_STREAM_ON, -1, &event);
rc = msm_post_event(&event, MSM_POST_EVT_TIMEOUT);
···
rc = camera_check_event_status(&event);
return rc;
}
分析:通过msm_post_event发生数据请求,等待数据回调。
Preview完整流程图

到此,preview预览流程结束
2.3 Camera的takePicture流程
事实上,tackPicture流程和preview的流程很类似!
以ZSL模式(零延迟模式)为切入点:
2.3.1 Hal层
hardware/qcom/camera/QCamera2/HAL/QCamera2HWI.cpp
int QCamera2HardwareInterface::takePicture()
{
···
//流程1
mCameraHandle->ops->start_zsl_snapshot(mCameraHandle->camera_handle,
pZSLChannel->getMyHandle());
···
//流程2
rc = pZSLChannel->takePicture(numSnapshots);
···
}
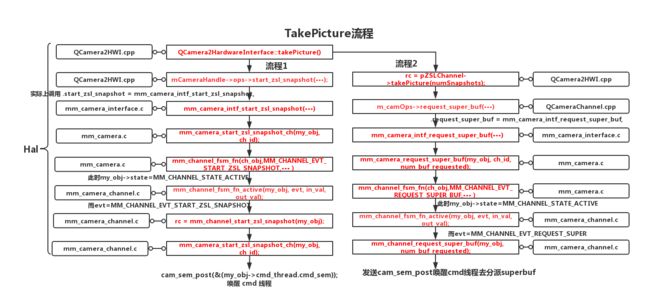
进入QCamera2HardwareInterface::takePicture后,会走2个流程:
1.mCameraHandle->ops->start_zsl_snapshot(···);
2.pZSLChannel->takePicture(numSnapshots);
流程1:
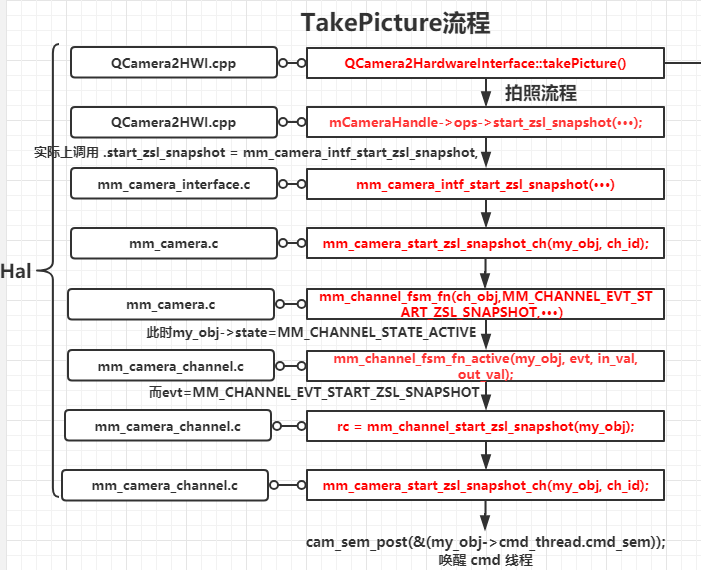
经过层层调用,最终会调用到mm_channel_start_zsl_snapshot
hardware/qcom/camera/QCamera2/stack/mm-camera-interface/src/mm_camera_channel.c
int32_t mm_channel_start_zsl_snapshot(mm_channel_t *my_obj)
{
int32_t rc = 0;
mm_camera_cmdcb_t* node = NULL;
node = (mm_camera_cmdcb_t *)malloc(sizeof(mm_camera_cmdcb_t));
if (NULL != node) {
memset(node, 0, sizeof(mm_camera_cmdcb_t));
node->cmd_type = MM_CAMERA_CMD_TYPE_START_ZSL;
/* enqueue to cmd thread */
cam_queue_enq(&(my_obj->cmd_thread.cmd_queue), node);
/* wake up cmd thread */
cam_sem_post(&(my_obj->cmd_thread.cmd_sem));
} else {
CDBG_ERROR("%s: No memory for mm_camera_node_t", __func__);
rc = -1;
}
return rc;
}
分析:
该函数主要做了2件事情:
- 1 cam_queue_enq(&(my_obj->cmd_thread.cmd_queue), node);入队
- 2 通过cam_sem_post(&(my_obj->cmd_thread.cmd_sem));唤醒cmd线程
这里的node->cmd_type=MM_CAMERA_CMD_TYPE_START_ZSL
hardware/qcom/camera/QCamera2/stack/mm-camera-interface/src/mm_camera_thread.c
static void *mm_camera_cmd_thread(void *data)
{
···
case MM_CAMERA_CMD_TYPE_START_ZSL:
cmd_thread->cb(node, cmd_thread->user_data);
···
}
这里cmd_thread->cb是回调函数:
cmd_thread->cb = mm_channel_process_stream_buf,经过层层复杂的回调
最终:
mm_channel_superbuf_skip(ch_obj, &ch_obj->bundle.superbuf_queue);
super_buf = (mm_channel_queue_node_t*)node->data;
将buffer 取出 且释放list中的node,最终将buffer queue给kernel进行下一次填充.
流程2:

同样,经过层层调用,最终调用到mm_channel_request_super_buf
hardware/qcom/camera/QCamera2/stack/mm-camera-interface/src/mm_camera_channel.c
int32_t mm_channel_request_super_buf(mm_channel_t *my_obj, uint32_t num_buf_requested)
{
/* set pending_cnt
* will trigger dispatching super frames if pending_cnt > 0 */
/* send cam_sem_post to wake up cmd thread to dispatch super buffer */
node = (mm_camera_cmdcb_t *)malloc(sizeof(mm_camera_cmdcb_t));
if (NULL != node) {
memset(node, 0, sizeof(mm_camera_cmdcb_t));
node->cmd_type = MM_CAMERA_CMD_TYPE_REQ_DATA_CB;
node->u.req_buf.num_buf_requested = num_buf_requested;
/* enqueue to cmd thread */
cam_queue_enq(&(my_obj->cmd_thread.cmd_queue), node);
/* wake up cmd thread */
cam_sem_post(&(my_obj->cmd_thread.cmd_sem));
} else {
CDBG_ERROR("%s: No memory for mm_camera_node_t", __func__);
rc = -1;
}
return rc;
}
分析:该函数和流程1一样:
- 1 cam_queue_enq(&(my_obj->cmd_thread.cmd_queue), node);入队
- 2 通过cam_sem_post(&(my_obj->cmd_thread.cmd_sem));唤醒cmd线程
static void *mm_camera_cmd_thread(void *data)
{
···
case MM_CAMERA_CMD_TYPE_START_ZSL:
case MM_CAMERA_CMD_TYPE_REQ_DATA_CB:
cmd_thread->cb(node, cmd_thread->user_data);
···
}
这里和流程1一样,就不再赘述!
2.3.2 Kernel层
int32_t mm_camera_start_zsl_snapshot(mm_camera_obj_t *my_obj)
{
···
rc = mm_camera_util_s_ctrl(my_obj->ctrl_fd,
CAM_PRIV_START_ZSL_SNAPSHOT, &value);
···
}
int32_t mm_camera_util_s_ctrl(int32_t fd, uint32_t id, int32_t *value)
{
···
rc = ioctl(fd, VIDIOC_S_CTRL, &control);
···
}
kernel/drivers/media/v4l2-core/v4l2-subdev.c
static long subdev_do_ioctl(struct file *file, unsigned int cmd, void *arg)
{
···
case VIDIOC_S_CTRL:
return v4l2_s_ctrl(vfh, vfh->ctrl_handler, arg);
···
}
通过ioctl(fd, VIDIOC_S_CTRL, &control)的方式,借助V4L2框架,调用到kernel层,
最终buffer queue给kernel进行下一次填充。
takePicture完整流程图