前言
至于为什么写这个教程,首先是为了自己学习做个记录,其次是因为Tensorflow的API写的很好,但是他的教程写的太乱了,不适合新手学习。tensorflow 1 和tensorflow 2 有相似之处但是不兼容,tensorflow 2将keras融合了。TensorFlow™ 是一个采用 数据流图(data flow graphs),用于数值计算的开源软件库。图中得节点(Nodes)表示数学操作,图中的线(edges)则表示在节点间相互联系的多维数据数组,即张量(tensor)。它灵活的架构让你可以在多种平台上展开计算,例如台式计算机中的一个或多个CPU(或GPU),服务器,移动设备等等。
TensorFlow的主要优点:
- 灵活性:支持底层数值计算,C++自定义操作符
- 可移植性:从服务器到PC到手机,从CPU到GPU到TPU
- 分布式计算:分布式并行计算,可指定操作符对应计算设备
层次结构
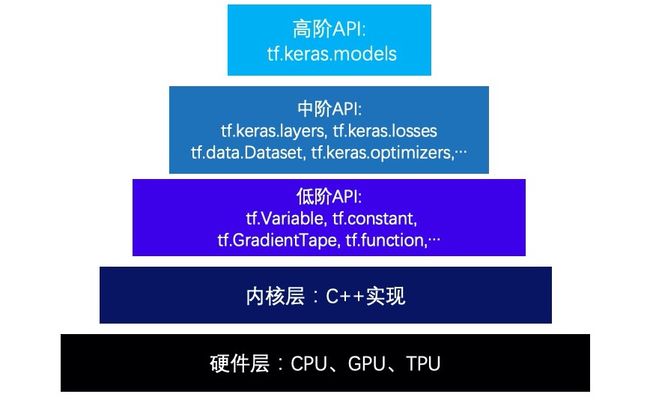
TensorFlow的层次结构从低到高可以分成如下五层:硬件层,内核层,低阶API,中阶API,高阶API。
- 第一层:硬件层,TensorFlow支持CPU、GPU或TPU加入计算资源池。
- 第二层:内核层,为C++实现的内核,kernel可以跨平台分布运行。
- 第三层:低阶API,由Python实现的操作符,提供了封装C++内核的低级API指令。主要包括各种张量操作算子、计算图、自动微分。如tf.Variable,tf.constant,tf.function,tf.GradientTape,tf.nn.softmax...
- 第四层:中阶API,由Python实现的模型组件,对低级API进行了函数封装。主要包括数据管道(tf.data)、特征列(tf.feature_column)、激活函数(tf.nn)、模型层(tf.keras.layers)、损失函数(tf.keras.losses)、评估函数(tf.keras.metrics)、优化器(tf.keras.optimizers)、回调函数(tf.keras.callbacks) 等等。
- 第五层:高阶API,由Python实现的模型成品。主要为tf.keras.models提供的模型的类接口,主要包括:模型的构建(Sequential、functional API、Model子类化)、型的训练(内置fit方法、内置train_on_batch方法、自定义训练循环、单GPU训练模型、多GPU训练模型、TPU训练模型)、模型的部署(tensorflow serving部署模型、使用spark(scala)调用tensorflow模型)。
概述
创建张量
tf.constant(value, dtype=tf.float32) # 常数 tf.range(start, limit=None, delta=1) # 生成一个范围内间隔为delta的 张量 tf.linspace(start, stop, num) # 在一个间隔内生成均匀间隔的值 tf.zeros() # 创建全0张量 tf.ones() # 创建全1张量 tf.zeros_like(input) # 创建和input一样大小的张量 tf.fill(dims, value) # 创建shape为dim,全为value的张量 tf.random.uniform([5], minval=0, maxval=10) # 均匀分布随机 tf.random.normal([3, 3], mean=0.0, stddev=1.0) # 正态分布随机 tf.Variable(initial_value) # 变量
tf.Variable:
- name:变量的名字,默认情况下,会自动获得唯一的变量名
- trainable:设置为 False 可以关闭梯度。例如,训练计步器就是一个不需要梯度的变量
tf.rank(a):求矩阵的秩
变量的设备位置
为了提高性能,TensorFlow 会尝试将张量和变量放在与其 dtype 兼容的最快设备上。这意味着如果有 GPU,那么大部分变量都会放置在 GPU 上,不过,我们可以重写变量的位置。
with tf.device('CPU:0'): # Create some tensors a = tf.Variable([[1.0, 2.0, 3.0], [4.0, 5.0, 6.0]]) b = tf.constant([[1.0, 2.0], [3.0, 4.0], [5.0, 6.0]]) c = tf.matmul(a, b) print(c)
使用assign重新分配张量
a.assign([5, 6]) # a = [5, 6] a.assign_add([2, 3]) # a = a+[2,3] a.assign_sub([7, 9]) # a=a-[7,9]
维度变换
维度变换相关函数主要有 tf.reshape,tf.squeeze,tf.expand_dims,tf.transpose。
- tf.reshape():改变张量的形状
- tf.squeeze():减少维度为1的维度
- tf.expand_dims(input, axis):增加维度
- tf.transpose(a, perm=None):交换维度
tf.reshape可以改变张量的形状,但是其本质上不会改变张量元素的存储顺序,所以,该操作实际上非常迅速,并且是可逆的。
合并分隔
和numpy类似,可以用tf.concat和tf.stack方法对多个张量进行合并,可以用tf.split方法把一个张量分割成多个张量。
tf.concat和tf.stack有略微的区别,tf.concat是连接,不会增加维度,而tf.stack是堆叠,会增加维度。
a = tf.constant([[1.0, 2.0], [3.0, 4.0]]) # (2,2) b = tf.constant([[5.0, 6.0], [7.0, 8.0]]) # (2,2) c = tf.concat([a, b], axis=0) # (4, 2) c = tf.stack([a, b], axis=0) # (2, 2, 2) d = tf.split(c, 2, axis=0) # [(1, 2, 2),(1, 2, 2)]
Tensor与Array的转换
c = np.array(b) # tensor 转 np c = b.numpy() # tensor 转 np tf.convert_to_tensor(c) # np 转 tensor
数学运算
tf.add(a,b) # 加法 a+b tf.multiply(a,b) # 逐元素乘法a*b tf.matmul(a,b) # 矩阵乘法a@b
类型转换
tensorflow支持的模型有:tf.float16、tf.float64、tf.int8、tf.int16、tf.int32...
a = tf.constant([2.2, 3.3, 4.4], dtype=tf.float64) b = tf.cast(a, dtype=tf.float16) # 类型转换
计算图
有三种计算图的构建方式:静态计算图,动态计算图,以及Autograph。在TensorFlow1.0时代,采用的是静态计算图,需要先使用TensorFlow的各种算子创建计算图,然后再开启一个会话Session,显式执行计算图。而在TensorFlow2.0时代,采用的是动态计算图,即每使用一个算子后,该算子会被动态加入到隐含的默认计算图中立即执行得到结果,而无需开启Session。使用动态计算图(Eager Excution)的好处是方便调试程序,它会让TensorFlow代码的表现和Python原生代码的表现一样,写起来就像写numpy一样,各种日志打印,控制流全部都是可以使用的。使用动态计算图的缺点是运行效率相对会低一些。因为使用动态图会有许多次Python进程和TensorFlow的C++进程之间的通信。而静态计算图构建完成之后几乎全部在TensorFlow内核上使用C++代码执行,效率更高。此外静态图会对计算步骤进行一定的优化,剪去和结果无关的计算步骤。
如果需要在TensorFlow2.0中使用静态图,可以使用@tf.function装饰器将普通Python函数转换成对应的TensorFlow计算图构建代码。运行该函数就相当于在TensorFlow1.0中用Session执行代码。使用tf.function构建静态图的方式叫做 Autograph。当然Autograph机制能够转换的代码并不是没有任何约束的,有一些编码规范需要遵循,否则可能会转换失败或者不符合预期。
- 被@tf.function修饰的函数应尽可能使用TensorFlow中的函数而不是Python中的其他函数。例如使用tf.print而不是print,使用tf.range而不是range,使用tf.constant(True)而不是True.
- 避免在@tf.function修饰的函数内部定义tf.Variable
- 被@tf.function修饰的函数不可修改该函数外部的列表或字典等数据结构变量
计算图由节点(nodes)和线(edges)组成。节点表示操作符Operator,或者称之为算子,线表示计算间的依赖。实线表示有数据传递依赖,传递的数据即张量。虚线通常可以表示控制依赖,即执行先后顺序。

import tensorflow as tf # 使用autograph构建静态图 @tf.function def strjoin(x,y): z = tf.strings.join([x,y],separator = " ") tf.print(z) return z result = strjoin(tf.constant("hello"),tf.constant("world")) print(result)
您可以像这样测量静态图和动态图性能差异:


x = tf.random.uniform(shape=[10, 10], minval=-1, maxval=2, dtype=tf.dtypes.int32) def power(x, y): result = tf.eye(10, dtype=tf.dtypes.int32) for _ in range(y): result = tf.matmul(x, result) return result print("Eager execution:", timeit.timeit(lambda: power(x, 100), number=1000)) # 2.56378621799 # 将python函数转换为图形 power_as_graph = tf.function(power) print("Graph execution:", timeit.timeit(lambda: power_as_graph(x, 100), number=1000)) # 0.683253670
我们还可以再函数前使用装饰器 @tf.function 调用tf.function,同时也可以使用 tf.config.run_functions_eagerly(True) 关闭Function创建和运行图形的能力。
前面在介绍Autograph的编码规范时提到构建Autograph时应该避免在@tf.function修饰的函数内部定义tf.Variable。但是如果在函数外部定义tf.Variable的话,又会显得这个函数有外部变量依赖,封装不够完美。一种简单的思路是定义一个类,并将相关的tf.Variable创建放在类的初始化方法中。而将函数的逻辑放在其他方法中。
class DemoModule(tf.Module): def __init__(self, init_value=tf.constant(0.0), name=None): super(DemoModule, self).__init__(name=name) with self.name_scope: # 相当于with tf.name_scope("demo_module") self.x = tf.Variable(init_value, dtype=tf.float32, trainable=True) @tf.function def addprint(self, a): with self.name_scope: self.x.assign_add(a) tf.print(self.x) return self.x
自动微分
自动微分用于训练神经网络的反向传播非常有用,TensorFlow 会记住在前向传递过程中哪些运算以何种顺序发生。随后,在后向传递期间,以相反的顺序遍历此运算列表来计算梯度。
Tensorflow一般使用tf.GradientTape来记录正向运算过程,然后反向传播自动计算梯度值。
$$f(x)=ax^2+bx+c$$
x = tf.Variable(0.0,name = "x",dtype = tf.float32) a = tf.constant(1.0) b = tf.constant(-2.0) c = tf.constant(1.0) with tf.GradientTape() as tape: y = a*tf.pow(x,2) + b*x + c dy_dx = tape.gradient(y,x) print(dy_dx) # tf.Tensor(-2.0, shape=(), dtype=float32)
对常量张量也可以求导,只不过需要增加watch
with tf.GradientTape() as tape: tape.watch([a,b,c]) y = a*tf.pow(x,2) + b*x + c dy_dx,dy_da,dy_db,dy_dc = tape.gradient(y,[x,a,b,c]) print(dy_da) # tf.Tensor(0.0, shape=(), dtype=float32) print(dy_dc) # tf.Tensor(1.0, shape=(), dtype=float32)
可以求二阶导数
with tf.GradientTape() as tape2: with tf.GradientTape() as tape1: y = a*tf.pow(x,2) + b*x + c dy_dx = tape1.gradient(y,x) dy2_dx2 = tape2.gradient(dy_dx,x) print(dy2_dx2) # tf.Tensor(2.0, shape=(), dtype=float32)
利用梯度和优化器求最小值
# 求f(x) = a*x**2 + b*x + c的最小值 # 使用optimizer.apply_gradients x = tf.Variable(0.0,name = "x",dtype = tf.float32) a = tf.constant(1.0) b = tf.constant(-2.0) c = tf.constant(1.0) optimizer = tf.keras.optimizers.SGD(learning_rate=0.01) for _ in range(1000): with tf.GradientTape() as tape: y = a*tf.pow(x,2) + b*x + c dy_dx = tape.gradient(y,x) # 计算梯度 optimizer.apply_gradients(grads_and_vars=[(dy_dx,x)]) # 根据梯度更新变量 tf.print("y =",y,"; x =",x)
如果不想被计算梯度:
with tf.GradientTape(watch_accessed_variables=False) as tape: pass
使用TensorFlow实现神经网络模型的一般流程包括:
- 准备数据
- 定义模型
- 训练模型
- 评估模型
- 推理模型
- 保存模型
数据输入
tensorflow支持 Numpy 数组、Pandas DataFrame、Python 生成器、csv文件、文本文件、文件路径、TFrecords文件等方式构建数据管道。如果您的数据很小并且适合内存,我们建议您使用tf.data.Dataset.from_tensor_slices()从Numpy array构建数据管道
- Dataset:如果您有大型数据集并且需要进行分布式训练
- Sequence:如果您有大型数据集并且需要执行大量在 TensorFlow 中无法完成的自定义 Python 端处理(例如,如果您依赖外部库进行数据加载或预处理)
- 通过tfrecords文件方式构建数据管道较为复杂,需要对样本构建tf.Example后压缩成字符串写到tfrecoreds文件,读取后再解析成tf.Example。但tfrecoreds文件的优点是压缩后文件较小,便于网络传播,加载速度较快。
Numpy构建数据
官方推荐使用 tf.data.Dataset.from_tensors() 或 tf.data.Dataset.from_tensor_slices() 创建数据集,Dataset支持一类特殊的操作Trainformation(打乱、生成epoch...等操作)
- data.map(function):将转换函数映射到数据集每一个元素
- data.batch(batch_size):构建batch
- data.shuffle(buffer_size):随机打乱输入数据,从该缓冲区中随机采样元素
- data.repeat():repeat的功能就是将整个序列重复多次,一般不带参数
- data.prefetch(tf.data.experimental.AUTOTUNE) :预先取 数据
- data.take():采样,从开始位置取前几个元素
- ...
features = np.arange(0, 100, dtype=np.int32) # # (100,) labels = np.zeros(100, dtype=np.int32) # (100,) data = tf.data.Dataset.from_tensor_slices((features, labels)) # 创建数据集 data = data.repeat() # 无限期地补充数据 data = data.shuffle(buffer_size=100) # 打乱数据 data = data.batch(batch_size=4) # 批量数据 data = data.prefetch(buffer_size=1) # 预取批处理(预加载批处理,消耗更快) for batch_x, batch_y in data.take(5): print(batch_x.shape, batch_y.shape) # (4,) (4,) break
注意:如果你打算多次调用,你可以使用迭代器的方式:
ite_data = iter(data) for i in range(5): batch_x, batch_y = next(ite_data) print(batch_x, batch_y) for i in range(5): batch_x, batch_y = next(ite_data) print(batch_x, batch_y)
提升管道性能
训练深度学习模型常常会非常耗时。模型训练的耗时主要来自于两个部分,一部分来自数据准备,另一部分来自参数迭代。参数迭代过程的耗时通常依赖于GPU来提升。而数据准备过程的耗时则可以通过构建高效的数据管道进行提升。
以下是一些构建高效数据管道的建议。
- 使用 prefetch 方法让数据准备和参数迭代两个过程相互并行。
- 使用 interleave 方法可以让数据读取过程多进程执行,并将不同来源数据夹在一起。
- 使用 map 时设置num_parallel_calls 让数据转换过程多进行执行。
- 使用 cache 方法让数据在第一个epoch后缓存到内存中,仅限于数据集不大情形。
- 使用 map转换时,先batch,然后采用向量化的转换方法对每个batch进行转换。
生成器构建数据
def generate_features(): # 函数生成一个随机字符串 def random_string(length): return ''.join(random.choice(string.ascii_letters) for m in range(length)) # 返回一个随机字符串、一个随机向量和一个随机整数 yield random_string(4), np.random.uniform(size=4), random.randint(0, 10) data = tf.data.Dataset.from_generator(generate_features, output_types=(tf.string, tf.float32, tf.int32)) data = data.repeat() # 无限期地补充数据 data = data.shuffle(buffer_size=100) # 打乱数据 data = data.batch(batch_size=4) # 批量数据(将记录聚合在一起) data = data.prefetch(buffer_size=1) # 预取批量(预加载批量以便更快的消耗) # Display data. for batch_str, batch_vector, batch_int in data.take(5): # (4,) (4, 4) (4,) print(batch_str.shape, batch_vector.shape, batch_int.shape)
keras.utils.Sequence
特别是,keras.utils.Sequence该类提供了一个简单的接口来构建 Python 数据生成器,该生成器可以感知多处理并且可以洗牌。
Sequence必须实现两种方法:
- __getitem__:返回一个batch数据
- __len__:整型,返回batch的数量
import tensorflow as tf from keras.utils.data_utils import Sequence class SequenceDataset(Sequence): def __init__(self, batch_size): self.input_data = tf.random.normal((640, 8192, 1)) self.label_data = tf.random.normal((640, 8192, 1)) self.batch_size = batch_size def __len__(self): return int(tf.math.ceil(len(self.input_data) / float(self.batch_size))) # 每次输出一个batch def __getitem__(self, idx): batch_x = self.input_data[idx * self.batch_size:(idx + 1) * self.batch_size] batch_y = self.label_data[idx * self.batch_size:(idx + 1) * self.batch_size] return batch_x, batch_y sequence = SequenceDataset(batch_size=64) for batch_idx, (x, y) in enumerate(sequence): print(batch_idx, x.shape, y.shape) # tf.float32 # 0 (64, 8192, 1) (64, 8192, 1) break
搭建模型
深度学习模型一般由各种模型层组合而成,如果这些内置模型层不能够满足需求,我们也可以通过编写tf.keras.Lambda匿名模型层或继承tf.keras.layers.Layer基类构建自定义的模型层。其中tf.keras.Lambda匿名模型层只适用于构造没有学习参数的模型层。
搭建模型有以下3种方式构建模型:
- Sequential顺序模型:用于简单的层堆栈, 其中每一层恰好有一个输入张量和一个输出张量
- 函数式API模型:多输入多输出,或者模型需要共享权重,或者模型具有残差连接等非顺序结构,
- 继承Model基类自定义模型:如果无特定必要,尽可能避免使用Model子类化的方式构建模型,这种方式提供了极大的灵活性,但也有更大的概率出错
顺序建模
model = keras.Sequential([ layers.Dense(2, activation="relu", name="layer1"), layers.Dense(3, activation="relu", name="layer2"), layers.Dense(4, name="layer3"), ])
还可以通过add方法创建顺序模型
model = keras.Sequential() model.add(layers.Dense(2, activation="relu")) model.add(layers.Dense(3, activation="relu")) model.add(layers.Dense(4))
因为模型不知道输入shape,所以起初模型没有权重,因此我们需要告知模型输入shape
# 在第一层添加Input model.add(keras.Input(shape=(4,))) model.add(layers.Dense(2, activation="relu")) # 或者在第一层添加input_shape model.add(layers.Dense(2, activation="relu", input_shape=(4,)))
顺序模型可以配合add 和 model.summary() 在模型的任何位置查看该层的输入输出。
函数式API建模
函数式API搭建模型比Sequential更加灵活,可以处理具有非线性拓扑、共享层甚至多个输入或输出的模型。
inputs = keras.Input(shape=(784,)) x = layers.Dense(64, activation="relu")(inputs) x = layers.Dense(64, activation="relu")(x) outputs = layers.Dense(10)(x) model = keras.Model(inputs=inputs, outputs=outputs, name="mnist_model") model.summary() # 查看模型摘要
还可以将模型绘制为图形
keras.utils.plot_model(model, "my_first_model_with_shape_info.png", show_shapes=True)

补充:函数式模型是可以嵌套的
自定义建模
在 TensorFlow 中,模型类的继承关系为:
tf.keras.Model > tf.keras.layers.Layer > tf.Module。
通常使用Layer类来定义内部计算块,并使用Model类定义外部模型(训练的对象)。
继承tf.Module栗子:
class SequentialModule(tf.Module): def __init__(self, name=None): super().__init__(name=name) self.dense_1 = Dense(in_features=3, out_features=3) self.dense_2 = Dense(in_features=3, out_features=2) def __call__(self, x): x = self.dense_1(x) return self.dense_2(x) my_model = SequentialModule(name="the_model")
继承tf.keras.layers.Layer栗子:
class ResBlock(layers.Layer): def __init__(self, kernel_size, **kwargs): super(ResBlock, self).__init__(**kwargs) self.kernel_size = kernel_size def build(self, input_shape): self.conv1 = layers.Conv1D(filters=64, kernel_size=self.kernel_size, activation="relu", padding="same") self.conv2 = layers.Conv1D(filters=32, kernel_size=self.kernel_size, activation="relu", padding="same") self.conv3 = layers.Conv1D(filters=input_shape[-1], kernel_size=self.kernel_size, activation="relu", padding="same") self.maxpool = layers.MaxPool1D(2) super(ResBlock, self).build(input_shape) # 相当于设置self.built = True def call(self, inputs): x = self.conv1(inputs) x = self.conv2(x) x = self.conv3(x) x = layers.Add()([inputs, x]) x = self.maxpool(x) return x # 如果要让自定义的Layer通过Functional API 组合成模型时可以序列化,需要自定义get_config方法。 def get_config(self): config = super(ResBlock, self).get_config() config.update({'kernel_size': self.kernel_size}) return config resblock = ResBlock(kernel_size=3) resblock.build(input_shape=(None, 200, 7)) resblock.compute_output_shape(input_shape=(None, 200, 7))
继承tf.Module栗子:
class ImdbModel(models.Model): def __init__(self): super(ImdbModel, self).__init__() def build(self, input_shape): self.embedding = layers.Embedding(MAX_WORDS, 7) self.block1 = ResBlock(7) self.block2 = ResBlock(5) self.dense = layers.Dense(1, activation="sigmoid") super(ImdbModel, self).build(input_shape) def call(self, x): x = self.embedding(x) x = self.block1(x) x = self.block2(x) x = layers.Flatten()(x) x = self.dense(x) return (x) model = ImdbModel() model.build(input_shape=(None, 200)) model.compile(optimizer='Nadam', loss='binary_crossentropy', metrics=['accuracy', "AUC"])
Model类具有Layer类相同的API,但有以下区别:
- Model类 提供了内置的训练 model.fit() 、评估 model.evaluate() 和预测 model.predict() API
- Model类 可以通过 model.layers 属性公开内层的列表。
- Model类 提供了保存和序列化 API save()、save_weights()...
Layer 类对应于“层”,Model 类对应于“模型”,如果您想知道“我应该使用Layer类还是Model类?”,请问自己:我需要调用fit()它吗?我需要save() 吗?如果是这样,请与Model。如果不是,请使用Layer。
把Layer 类和Model 类用在一起,吃个栗子:
class Sampling(layers.Layer): """使用(z_mean, z_log_var)对z进行采样,z是对一个数字进行编码的向量""" def call(self, inputs): z_mean, z_log_var = inputs batch = tf.shape(z_mean)[0] dim = tf.shape(z_mean)[1] epsilon = tf.keras.backend.random_normal(shape=(batch, dim)) return z_mean + tf.exp(0.5 * z_log_var) * epsilon class Encoder(layers.Layer): """将MNIST数字映射为一个三元组(z_mean, z_log_var, z)""" def __init__(self, latent_dim=32, intermediate_dim=64, name="encoder", **kwargs): super(Encoder, self).__init__(name=name, **kwargs) self.dense_proj = layers.Dense(intermediate_dim, activation="relu") self.dense_mean = layers.Dense(latent_dim) self.dense_log_var = layers.Dense(latent_dim) self.sampling = Sampling() def call(self, inputs): x = self.dense_proj(inputs) z_mean = self.dense_mean(x) z_log_var = self.dense_log_var(x) z = self.sampling((z_mean, z_log_var)) return z_mean, z_log_var, z class Decoder(layers.Layer): """将已编码的数字向量z转换回可读的数字""" def __init__(self, original_dim, intermediate_dim=64, name="decoder", **kwargs): super(Decoder, self).__init__(name=name, **kwargs) self.dense_proj = layers.Dense(intermediate_dim, activation="relu") self.dense_output = layers.Dense(original_dim, activation="sigmoid") def call(self, inputs): x = self.dense_proj(inputs) return self.dense_output(x) class VariationalAutoEncoder(keras.Model): """将编码器和解码器组合成端到端的训练模型。""" def __init__(self, original_dim, intermediate_dim=64, latent_dim=32, name="autoencoder", **kwargs): super(VariationalAutoEncoder, self).__init__(name=name, **kwargs) self.original_dim = original_dim self.encoder = Encoder(latent_dim=latent_dim, intermediate_dim=intermediate_dim) self.decoder = Decoder(original_dim, intermediate_dim=intermediate_dim) def call(self, inputs): z_mean, z_log_var, z = self.encoder(inputs) reconstructed = self.decoder(z) # Add KL divergence regularization loss. kl_loss = -0.5 * tf.reduce_mean(z_log_var - tf.square(z_mean) - tf.exp(z_log_var) + 1) self.add_loss(kl_loss) return reconstructed
自定义循环训练模型
original_dim = 784 vae = VariationalAutoEncoder(original_dim, 64, 32) optimizer = tf.keras.optimizers.Adam(learning_rate=1e-3) mse_loss_fn = tf.keras.losses.MeanSquaredError() loss_metric = tf.keras.metrics.Mean() (x_train, _), _ = tf.keras.datasets.mnist.load_data() x_train = x_train.reshape(60000, 784).astype("float32") / 255 train_dataset = tf.data.Dataset.from_tensor_slices(x_train) train_dataset = train_dataset.shuffle(buffer_size=1024).batch(64) epochs = 2 # Iterate over epochs. for epoch in range(epochs): print("Start of epoch %d" % (epoch,)) # Iterate over the batches of the dataset. for step, x_batch_train in enumerate(train_dataset): with tf.GradientTape() as tape: reconstructed = vae(x_batch_train) # Compute reconstruction loss loss = mse_loss_fn(x_batch_train, reconstructed) loss += sum(vae.losses) # Add KLD regularization loss grads = tape.gradient(loss, vae.trainable_weights) optimizer.apply_gradients(zip(grads, vae.trainable_weights)) loss_metric(loss) if step % 100 == 0: print("step %d: mean loss = %.4f" % (step, loss_metric.result()))
内置循环方法
vae = VariationalAutoEncoder(784, 64, 32) optimizer = tf.keras.optimizers.Adam(learning_rate=1e-3) vae.compile(optimizer, loss=tf.keras.losses.MeanSquaredError()) vae.fit(x_train, x_train, epochs=2, batch_size=64)
函数式API和自定义Model类混搭训练
original_dim = 784 intermediate_dim = 64 latent_dim = 32 # Define encoder model. original_inputs = tf.keras.Input(shape=(original_dim,), name="encoder_input") x = layers.Dense(intermediate_dim, activation="relu")(original_inputs) z_mean = layers.Dense(latent_dim, name="z_mean")(x) z_log_var = layers.Dense(latent_dim, name="z_log_var")(x) z = Sampling()((z_mean, z_log_var)) encoder = tf.keras.Model(inputs=original_inputs, outputs=z, name="encoder") # Define decoder model. latent_inputs = tf.keras.Input(shape=(latent_dim,), name="z_sampling") x = layers.Dense(intermediate_dim, activation="relu")(latent_inputs) outputs = layers.Dense(original_dim, activation="sigmoid")(x) decoder = tf.keras.Model(inputs=latent_inputs, outputs=outputs, name="decoder") # Define VAE model. outputs = decoder(z) vae = tf.keras.Model(inputs=original_inputs, outputs=outputs, name="vae") # Add KL divergence regularization loss. kl_loss = -0.5 * tf.reduce_mean(z_log_var - tf.square(z_mean) - tf.exp(z_log_var) + 1) vae.add_loss(kl_loss) # Train. optimizer = tf.keras.optimizers.Adam(learning_rate=1e-3) vae.compile(optimizer, loss=tf.keras.losses.MeanSquaredError()) vae.fit(x_train, x_train, epochs=3, batch_size=64) 函数式API训练模型
补充知识:自定义层
如果自定义模型层没有需要被训练的参数,一般推荐使用Lamda层实现。
mypower = layers.Lambda(lambda x:tf.math.pow(x,2)) mypower(tf.range(5))
如果自定义模型层有需要被训练的参数,则可以通过继承Layer基类实现。Layer的子类化一般需要重新实现初始化方法,Build方法和Call方法。如果built = False,调用__call__时会先调用build方法, 再调用call方法。
损失函数
一般来说,监督学习的目标函数由损失函数和正则化项组成(Objective = Loss + Regularization)。对于keras模型,目标函数中的正则化项一般在各层中指定,例如使用Dense的 kernel_regularizer 和 bias_regularizer等参数指定权重使用l1或者l2正则化项,此外还可以用kernel_constraint 和 bias_constraint等参数约束权重的取值范围,这也是一种正则化手段。
损失函数在模型编译时候指定。
- 对于回归模型,通常使用的损失函数是平方损失函数 mean_squared_error,简写为 mse,类实现形式为 MeanSquaredError 和 MSE
- 对于二分类模型,通常使用的是二元交叉熵损失函数 binary_crossentropy。
- 对于多分类模型,如果label是one-hot编码的,则使用交叉熵损失函数 categorical_crossentropy。如果label是序号编码的,则需要使用稀疏类别交叉熵损失函数 sparse_categorical_crossentropy。
- 如果有需要,也可以自定义损失函数,自定义损失函数需要接收两个张量y_true,y_pred作为输入参数,并输出一个标量作为损失函数值。
常见的Loss可以参看Tensorflow的官网:tf.keras.losses
自定义损失函数
自定义损失函数接收两个张量y_true,y_pred作为输入参数,并输出一个标量作为损失函数值。
def focal_loss(gamma=2., alpha=.25): def focal_loss_fixed(y_true, y_pred): pt_1 = tf.where(tf.equal(y_true, 1), y_pred, tf.ones_like(y_pred)) pt_0 = tf.where(tf.equal(y_true, 0), y_pred, tf.zeros_like(y_pred)) loss = -tf.sum(alpha * tf.pow(1. - pt_1, gamma) * tf.log(1e-07+pt_1)) \ -tf.sum((1-alpha) * tf.pow( pt_0, gamma) * tf.log(1. - pt_0 + 1e-07)) return loss return focal_loss_fixed
也可以对tf.keras.losses.Loss进行子类化,重写call方法实现损失的计算逻辑,从而得到损失函数的类的实现。
class FocalLoss(losses.Loss): def __init__(self,gamma=2.0,alpha=0.25): self.gamma = gamma self.alpha = alpha def call(self,y_true,y_pred): pt_1 = tf.where(tf.equal(y_true, 1), y_pred, tf.ones_like(y_pred)) pt_0 = tf.where(tf.equal(y_true, 0), y_pred, tf.zeros_like(y_pred)) loss = -tf.sum(self.alpha * tf.pow(1. - pt_1, self.gamma) * tf.log(1e-07+pt_1)) \ -tf.sum((1-self.alpha) * tf.pow( pt_0, self.gamma) * tf.log(1. - pt_0 + 1e-07)) return loss
度量函数
人们通常会通过度量函数来从另一个方面 评估模型的好坏,度量函数不要求连续可导,
- 编译模型时,可以通过列表形式指定多个评估指标。
- 也可以自定义评估指标。自定义评估指标需要接收两个张量y_true,y_pred作为输入参数,并输出一个标量作为评估值。
- 也可以继承 tf.keras.metrics.Metric自定义度量方法,update_state方法,result方法实现评估指标的计算逻辑,从而得到评估指标的类的实现形式。
Tensorflow内置的评估指标可以常见:tf.keras.metrics
函数自定义度量
如果编写函数形式的评估指标,则只能取epoch中各个batch计算的评估指标结果,这个结果通常会偏离拿整个epoch数据一次计算的结果。
@tf.function def ks(y_true,y_pred): y_true = tf.reshape(y_true,(-1,)) y_pred = tf.reshape(y_pred,(-1,)) length = tf.shape(y_true)[0] t = tf.math.top_k(y_pred,k = length,sorted = False) y_pred_sorted = tf.gather(y_pred,t.indices) y_true_sorted = tf.gather(y_true,t.indices) cum_positive_ratio = tf.truediv( tf.cumsum(y_true_sorted),tf.reduce_sum(y_true_sorted)) cum_negative_ratio = tf.truediv( tf.cumsum(1 - y_true_sorted),tf.reduce_sum(1 - y_true_sorted)) ks_value = tf.reduce_max(tf.abs(cum_positive_ratio - cum_negative_ratio)) return ks_value
类自定义度量
由于训练的过程通常是分批次训练的,而评估指标要跑完一个epoch才能够得到整体的指标结果。因此,类形式的评估指标更为常见。即需要编写update_state方法在每个batch后更新相关中间变量的状态,编写result方法输出最终指标结果。
class KS(metrics.Metric): def __init__(self, name="ks", **kwargs): super(KS, self).__init__(name=name, **kwargs) self.true_positives = self.add_weight( name="tp", shape=(101,), initializer="zeros") self.false_positives = self.add_weight( name="fp", shape=(101,), initializer="zeros") @tf.function def update_state(self, y_true, y_pred): y_true = tf.cast(tf.reshape(y_true, (-1,)), tf.bool) y_pred = tf.cast(100 * tf.reshape(y_pred, (-1,)), tf.int32) for i in tf.range(0, tf.shape(y_true)[0]): if y_true[i]: self.true_positives[y_pred[i]].assign( self.true_positives[y_pred[i]] + 1.0) else: self.false_positives[y_pred[i]].assign( self.false_positives[y_pred[i]] + 1.0) return (self.true_positives, self.false_positives) @tf.function def result(self): cum_positive_ratio = tf.truediv( tf.cumsum(self.true_positives), tf.reduce_sum(self.true_positives)) cum_negative_ratio = tf.truediv( tf.cumsum(self.false_positives), tf.reduce_sum(self.false_positives)) ks_value = tf.reduce_max(tf.abs(cum_positive_ratio - cum_negative_ratio)) return ks_value y_true = ... y_pred = ... myks = KS() myks.update_state(y_true, y_pred) tf.print(myks.result())
优化器
机器学习界有一群炼丹师,他们每天的日常是:拿来药材(数据),架起八卦炉(模型),点着六味真火(优化算法),就摇着蒲扇等着丹药出炉了。不过,当过厨子的都知道,同样的食材,同样的菜谱,但火候不一样了,这出来的口味可是千差万别。火小了夹生,火大了易糊,火不匀则半生半糊。机器学习也是一样,模型优化算法的选择直接关系到最终模型的性能。有时候效果不好,未必是特征的问题或者模型设计的问题,很可能就是优化算法的问题。
深度学习优化算法大概经历了 SGD -> SGDM -> NAG ->Adagrad -> Adadelta(RMSprop) -> Adam -> Nadam 这样的发展历程。model.compile(optimizer=optimizers.SGD(learning_rate=0.01), loss=loss)
- SGD:默认参数为纯SGD, 设置momentum参数不为0实际上变成SGDM, 考虑了一阶动量, 设置 nesterov为True后变成NAG,即 Nesterov Acceleration Gradient,在计算梯度时计算的是向前走一步所在位置的梯度
- Adagrad:考虑了二阶动量,对于不同的参数有不同的学习率,即自适应学习率。缺点是学习率单调下降,可能后期学习速率过慢乃至提前停止学习
- RMSprop:考虑了二阶动量,对于不同的参数有不同的学习率,即自适应学习率,对Adagrad进行了优化,通过指数平滑只考虑一定窗口内的二阶动量
- Adadelta:考虑了二阶动量,与RMSprop类似,但是更加复杂一些,自适应性更强
- Adam:同时考虑了一阶动量和二阶动量,可以看成RMSprop上进一步考虑了Momentum
- Nadam:在Adam基础上进一步考虑了 Nesterov Acceleration
对于一般新手炼丹师,优化器直接使用Adam,并使用其默认参数就OK了。一些爱写论文的炼丹师由于追求评估指标效果,可能会偏爱前期使用Adam优化器快速下降,后期使用SGD并精调优化器参数得到更好的结果。此外目前也有一些前沿的优化算法,据称效果比Adam更好,例如LazyAdam, Look-ahead, RAdam, Ranger等。
初始化优化器时会创建一个变量optimier.iterations用于记录迭代的次数。因此优化器和tf.Variable一样,一般在@tf.function外创建。
优化器主要使用apply_gradients方法传入变量和对应梯度从而来对给定变量进行迭代,
optimizer = tf.keras.optimizers.SGD(learning_rate=0.01) with tf.GradientTape() as tape: ... grads = tape.gradient(loss, model.trainable_weights) # 根据损失 求梯度 optimizer.apply_gradients(zip(grads, model.trainable_weights)) # 根据梯度 优化模型
或者直接使用minimize方法对目标函数进行迭代优化。
@tf.function def train(epoch=1000): for _ in tf.range(epoch): optimizer.minimize(loss, model.trainable_weights) tf.print("epoch = ", optimizer.iterations) return loss
当然,更常见的使用是在编译时将优化器传入model.fit
model.compile(optimizer=optimizers.SGD(learning_rate=0.01), loss=loss)
回调函数
tf.keras的回调函数实际上是一个类,一般是在model.fit时作为参数指定,一般收集一些日志信息,改变学习率等超参数,提前终止训练过程等等。
大部分时候,keras.callbacks子模块中定义的回调函数类已经足够使用了,如果有特定的需要,我们也可以通过对keras.callbacks.Callbacks实施子类化构造自定义的回调函数。
- BaseLogger: 收集每个epoch上metrics平均值,对stateful_metrics参数中的带中间状态的指标直接拿最终值无需对各个batch平均,指标均值结果将添加到logs变量中。该回调函数被所有模型默认添加,且是第一个被添加的。
- History: 将BaseLogger计算的各个epoch的metrics结果记录到history这个dict变量中,并作为model.fit的返回值。该回调函数被所有模型默认添加,在BaseLogger之后被添加。
- EarlyStopping: 当被监控指标在设定的若干个epoch后没有提升,则提前终止训练。
- TensorBoard: 为Tensorboard可视化保存日志信息。支持评估指标,计算图,模型参数等的可视化。
- ModelCheckpoint: 在每个epoch后保存模型。
- ReduceLROnPlateau:如果监控指标在设定的若干个epoch后没有提升,则以一定的因子减少学习率。
- TerminateOnNaN:如果遇到loss为NaN,提前终止训练。
- LearningRateScheduler:学习率控制器。给定学习率lr和epoch的函数关系,根据该函数关系在每个epoch前调整学习率。
- CSVLogger:将每个epoch后的logs结果记录到CSV文件中。
- ProgbarLogger:将每个epoch后的logs结果打印到标准输出流中。
Tensorboard
Tensorboard有助于追踪模型训练过程的Scalars、Graphs、Distributions等等
- Scalars:显示损失和指标在每个时期如何变化。 还可以使用它来跟踪训练速度,学习率和其他标量值。
- Graphs:可帮助您可视化模型。
- Distributions 和 Histograms 显示张量随时间的分布。 可以 可视化权重和偏差并验证它们是否以预期的方式变化
在model.fit中使用
当使用Model.fit() 函数进行训练时, 添加 tf.keras.callback.TensorBoard 回调函数可确保创建和存储日志
tensorboard_callback = tf.keras.callbacks.TensorBoard(log_dir="./event_file") model.fit(... callbacks=[tensorboard_callback])
在自定义框架中使用
summary_writer = tf.summary.create_file_writer("./event_file") with summary_writer.as_default(): tf.summary.scalar('train/loss', train_loss, step=epoch) tf.summary.scalar('train/accuracy', train_accuracy, step=epoch) tf.summary.scalar('val/loss', val_loss, step=epoch) tf.summary.scalar('val/accuracy', val_accuracy, step=epoch)
启动Tensorboard,在当前文件夹中,cmd运行:
tensorboard --logdir "./"
训练模型
训练模型通常有3种方法,
- 内置fit方法:支持对numpy array,tf.data.Dataset以及 Python generator数据进行训练,并且可以通过设置回调函数实现对训练过程的复杂控制逻辑。
- 内置train_on_batch方法
- 自定义训练循环
model.fit
model.fit( x=None, y=None, batch_size=None, epochs=1, verbose='auto', callbacks=None, validation_split=0.0, validation_data=None, shuffle=True, initial_epoch=0, steps_per_epoch=None)
参数:
- x:输入数据,可以是:
- numpy数组、数组列表(如果模型有多个输入)
- Tensorflow张量或张量列表(如果模型有多个输入)
- 如果模型具有命名输入,则将输入名称映射到相应的数组/张量的字典。
- tf.data数据集,应该返回一个(inputs, targets)或 的元组(inputs, targets, sample_weights)
- 生成器或keras.utils.Sequence返回(inputs, targets) 或(inputs, targets, sample_weights)。
- y:目标数据。与输入数据一样
x,它可以是 Numpy 数组或 TensorFlow 张量。它应该是一致的x(你不能有 Numpy 输入和张量目标,或者相反)。如果x是数据集、生成器或keras.utils.Sequence实例,y则不应指定(因为目标将从 获取x)。 - batch_size:每次梯度更新的样本数。如果未指定,将默认为 32。如果您的数据是数据集、生成器或实例的形式(因为它们生成批次),请不要指定。
- epochs:训练模型的周期数
- verbose:'auto'、0、1 或 2。详细模式。0 =静默,1 = 进度条,2 = 每个 epoch 一行。'auto' 在大多数情况下默认为 1
- callbacks:训练期间调用的回调列表。见
tf.keras.callbacks。 - validation_split:在 0 和 1 之间浮动。从训练数据集中分离一部分数据用于验证,并将在每个 epoch 结束时评估该数据的损失和指标
- validation_data:验证数据集
- shuffle:布尔值(是否在每个 epoch 之前对训练数据进行洗牌)
- initial_epoch:整数。开始训练的epoch(对于恢复之前的训练运行很有用)。
返回:history,调用 history.history 可以查看训练期间损失值和度量值的记录
train_on_batch
该内置方法相比较fit方法更加灵活,可以不通过回调函数而直接在batch层次上更加精细地控制训练的过程。
for epoch in tf.range(1, epoches + 1): for x, y in ds_train: train_result = model.train_on_batch(x, y) for x, y in ds_valid: valid_result = model.test_on_batch(x, y, reset_metrics=False)
自定义训练循环
自定义训练循环无需编译模型,直接利用优化器根据损失函数反向传播迭代参数,拥有最高的灵活性。
训练循环包括按顺序重复执行三个任务:
- 给模型输入batch数据以生成输出
- 通过将输出与标签进行比较来计算损失
- 使用GradientTape计算梯度
- 使用这些梯度优化变量
optimizer = keras.optimizers.SGD(learning_rate=1e-3) # 实例化一个优化器 loss_fn = keras.losses.BinaryCrossentropy() # 实例化损失函数 train_loss = keras.metrics.Mean(name='train_loss') valid_loss = keras.metrics.Mean(name='valid_loss') train_metric = keras.metrics.BinaryAccuracy(name='train_accuracy') valid_metric = keras.metrics.BinaryAccuracy(name='valid_accuracy') @tf.function def train_step(features, labels): with tf.GradientTape() as tape: logits = model(features, training=True) loss_value = loss_fn(labels, logits) # loss_value += sum(model.losses) # 添加额外的损失 grads = tape.gradient(loss_value, model.trainable_weights) optimizer.apply_gradients(zip(grads, model.trainable_weights)) train_loss.update_state(loss_value) train_metric.update_state(labels, logits) @tf.function def valid_step(features, labels): val_logits = model(features, training=False) loss_value = loss_fn(labels, val_logits) valid_loss.update_state(loss_value) valid_metric.update_state(labels, val_logits) epochs = 2 for epoch in range(epochs): start_time = time.time() for step, (x_batch_train, y_batch_train) in enumerate(train_dataset): loss_value = train_step(x_batch_train, y_batch_train) # 在每个epoch结束时运行验证循环 for x_batch_val, y_batch_val in val_dataset: valid_step(x_batch_val, y_batch_val) if epoch % 5 == 0: print('Epoch={},Loss:{},Accuracy:{},Valid Loss:{},Valid Accuracy:{}'.format(epoch, train_loss.result(), train_metric.result(), valid_loss.result(), valid_metric.result())) train_loss.reset_states() valid_loss.reset_states() train_metric.reset_states() valid_metric.reset_states() print("运行时间: %.2fs" % (time.time() - start_time))
评估模型
通过自定义训练循环训练的模型没有经过编译,无法直接使用model.evaluate(ds_valid)方法
model.evaluate(x = x_test,y = y_test)
推理模型
可以使用以下方法:
model.predict(ds_test)
model(x_test)
model.call(x_test)
model.predict_on_batch(x_test)
推荐优先使用model.predict(ds_test)方法,既可以对Dataset,也可以对Tensor使用。
保存和加载模型
可以使用Keras方式保存模型,也可以使用TensorFlow原生方式保存。前者仅仅适合使用Python环境恢复模型,后者则可以跨平台进行模型部署。推荐使用后一种方式进行保存。
Keras保存和加载模型
保存的模型包括:
- 模型架构 / 配置
- 模型权重值
- 模型的编译信息(如果 compile() 被调用)
- 优化器及其状态(如果有)(这使您可以在离开的地方重新开始训练)
# 保存模型 model.save('path/to/location') del model #删除现有模型 # 加载模型 model = models.load_model('path/to/location')
我们可以使用两种格式将整个模型保存到磁盘:
- TensorFlow SavedModel 格式(推荐):它保存了模型架构、权重和调用函数的跟踪 Tensorflow 子图。这使 Keras 能够恢复内置层和自定义对象。
- Keras H5 格式(较旧的):包含模型架构、权重值和compile()信息。它是SavedModel的轻量级替代品。
- 通过model.add_loss()和model.add_metric()添加的外部损失和度量 不会被保存
- 自定义对象(如自定义层)的计算图不包含在保存的h5文件中。在加载时,Keras需要访问这些对象的Python类/函数来重构模型。
可以通过以下方式保存 H5 格式:
- 传递save_format='h5'给save()
- 以.h5或.keras结尾的文件名传递给save()
我们还可以只保存模型结构
json_str = model.to_json() # 保存模型结构 model_json = models.model_from_json(json_str) # 恢复模型结构
或者只保存模型权重
# 保存模型权重 model.save_weights(...) # 恢复模型结构 model_json = models.model_from_json(json_str) model_json.compile(...) # 加载权重 model_json.load_weights(...)
TensorFlow原生方式保存和加载
保存模型结构与模型参数到文件,该方式保存的模型具有跨平台性便于部署
model.save(..., save_format="tf") # 保存模型 model_loaded = tf.keras.models.load_model(...) # 加载模型
也可以仅保存权重
model.save_weights(...,save_format = "tf")
汇总
import tensorflow as tf from tensorflow import keras from tensorflow.keras import layers import numpy as np import time # 超参数 lr = 1e-3 # 学习率 batch_size = 64 epochs = 2 # 数据准备 (x_train, y_train), (x_test, y_test) = keras.datasets.mnist.load_data() x_train = np.reshape(x_train, (-1, 784)) x_test = np.reshape(x_test, (-1, 784)) # 保留1万个样品用于验证 x_val = x_train[-10000:] y_val = y_train[-10000:] x_train = x_train[:-10000] y_train = y_train[:-10000] # 准备训练数据集 train_dataset = tf.data.Dataset.from_tensor_slices((x_train, y_train)) train_dataset = train_dataset.shuffle(buffer_size=1024).batch(batch_size) # 准备验证数据集 val_dataset = tf.data.Dataset.from_tensor_slices((x_val, y_val)) val_dataset = val_dataset.batch(batch_size) # 搭建模型 inputs = keras.Input(shape=(784,), name="digits") x1 = layers.Dense(64, activation="relu")(inputs) x2 = layers.Dense(64, activation="relu")(x1) outputs = layers.Dense(10, name="predictions")(x2) model = keras.Model(inputs=inputs, outputs=outputs) optimizer = keras.optimizers.SGD(learning_rate=lr) # 实例化一个优化器 loss_fn = keras.losses.SparseCategoricalCrossentropy(from_logits=True) # 实例化损失函数 train_metric = keras.metrics.BinaryAccuracy(name='train_accuracy') valid_metric = keras.metrics.BinaryAccuracy(name='valid_accuracy') @tf.function def train_step(x, y): with tf.GradientTape() as tape: logits = model(x, training=True) loss_value = loss_fn(y, logits) # loss_value += sum(model.losses) # 添加额外的损失 grads = tape.gradient(loss_value, model.trainable_weights) optimizer.apply_gradients(zip(grads, model.trainable_weights)) train_metric.update_state(y, logits) return loss_value @tf.function def test_step(x, y): val_logits = model(x, training=False) valid_metric.update_state(y, val_logits) for epoch in range(epochs): start_time = time.time() for step, (x_batch_train, y_batch_train) in enumerate(train_dataset): loss_value = train_step(x_batch_train, y_batch_train) if step % 200 == 0: print("训练损失( %d: %.4f" % (step, float(loss_value))) train_acc = train_metric.result() print("训练精度: %.4f" % (float(train_acc),)) train_metric.reset_states() # 在每个epoch结束时重置训练指标 # 在每个epoch结束时运行验证循环 for x_batch_val, y_batch_val in val_dataset: test_step(x_batch_val, y_batch_val) val_acc = valid_metric.result() valid_metric.reset_states() print("验证精度: %.4f" % (float(val_acc),)) print("运行时间: %.2fs" % (time.time() - start_time))
GPU训练
指定GPU训练
深度学习的训练过程常常非常耗时,一个模型训练几个小时是家常便饭,训练几天也是常有的事情,有时候甚至要训练几十天。
训练过程的耗时主要来自于两个部分,一部分来自数据准备,另一部分来自参数更新。
数据准备过程可以使用更多进程处理数据来缩减时间。参数更新时间可以应用GPU或者Google的TPU来进行加速。
当存在可用的GPU时,如果不特意指定device,tensorflow会自动优先选择使用GPU来创建张量和执行张量计算。但如果是在公司或者学校实验室的服务器环境,存在多个GPU和多个使用者时,为了不让单个同学的任务占用全部GPU资源导致其他同学无法使用(tensorflow默认获取全部GPU的全部内存资源权限,但实际上只使用一个GPU的部分资源),我们通常会在开头增加以下几行代码以控制每个任务使用的GPU编号和显存大小,以便其他同学也能够同时训练模型。
gpus = tf.config.list_physical_devices("GPU") tf.print(gpus) # [PhysicalDevice(name='/physical_device:GPU:0', device_type='GPU'), # PhysicalDevice(name='/physical_device:GPU:1', device_type='GPU'), # PhysicalDevice(name='/physical_device:GPU:2', device_type='GPU'), # PhysicalDevice(name='/physical_device:GPU:3', device_type='GPU')] if gpus: gpu0 = gpus[0] # 如果有多个GPU,仅使用第0个GPU tf.config.experimental.set_memory_growth(gpu0, True) # 设置GPU显存用量按需使用 # 或者也可以设置GPU显存为固定使用量(例如:4G) # tf.config.experimental.set_virtual_device_configuration(gpu0, # [tf.config.experimental.VirtualDeviceConfiguration(memory_limit=4096)]) tf.config.set_visible_devices([gpu0], "GPU")
单机多卡训练
TensorFlow 在 tf.distribute.MirroredStrategy 中为我们提供了单机多卡训练策略,使用这种策略时,我们只需实例化一个 MirroredStrategy 策略,并将模型构建的代码放入 strategy.scope() 的上下文环境中:
strategy = tf.distribute.MirroredStrategy() with strategy.scope(): # 模型构建代码
可以在参数中指定设备,如:
# 指定只使用第 0、1 号 GPU 参与分布式策略。 strategy = tf.distribute.MirroredStrategy(devices=["/gpu:0", "/gpu:1"])
MirroredStrategy 的步骤如下:
- 训练开始前,该策略在所有 N 个计算设备上均各复制一份完整的模型;
- 每次训练传入一个batch的数据时,将数据分成 N 份,分别传入 N 个计算设备(即数据并行);
- N 个计算设备使用本地变量(镜像变量)分别计算自己所获得的部分数据的梯度;
- 使用分布式计算的 All-reduce 操作,在计算设备间高效交换梯度数据并进行求和,使得最终每个设备都有了所有设备的梯度之和;
- 使用梯度求和的结果更新本地变量(镜像变量);
- 当所有设备均更新本地变量后,进行下一轮训练(即该并行策略是同步的)。
默认情况下,TensorFlow 中的 MirroredStrategy 策略使用 NVIDIA NCCL 进行 All-reduce 操作。
tf.distribute.Strategy和model.fit
tf.distribute.Strategy被集成到tf.keras,tf.keras是用于构建和训练模型的高级 API。您可以使用 Model.fit 来无缝分布式训练模型
TensorFlow 分布策略支持所有类型的 Keras 模型——Sequential、Functional和subclassed。以下是您需要在代码中更改的内容:
- 创建实例 tf.distribute.Strategy。
- 在strategy.scope中创建 Keras 模型、优化器和度量
num_epochs = 5 batch_size_per_replica = 64 # 每个显卡上的batch数 learning_rate = 0.001 strategy = tf.distribute.MirroredStrategy() print('Number of devices: %d' % strategy.num_replicas_in_sync) # 输出设备数量 batch_size = batch_size_per_replica * strategy.num_replicas_in_sync # 总batch_size dataset = ... with strategy.scope(): model = tf.keras.applications.MobileNetV2(weights=None, classes=2) model.compile( optimizer=tf.keras.optimizers.Adam(learning_rate=learning_rate), loss=tf.keras.losses.sparse_categorical_crossentropy, metrics=[tf.keras.metrics.sparse_categorical_accuracy] ) model.fit(dataset, epochs=num_epochs)
分布式训练汇总
import os import tensorflow as tf import tensorflow_datasets as tfds strategy = tf.distribute.MirroredStrategy() print('设备数量: {}'.format(strategy.num_replicas_in_sync)) epochs = 12 batch_size_per_replica = 64 batch_size = batch_size_per_replica * strategy.num_replicas_in_sync # 数据集 def scale(image, label): image = tf.cast(image, tf.float32) image /= 255 return image, label datasets, info = tfds.load(name='mnist', with_info=True, as_supervised=True) mnist_train, mnist_test = datasets['train'], datasets['test'] train_dataset = mnist_train.map(scale).cache().shuffle(10000).batch(batch_size) eval_dataset = mnist_test.map(scale).batch(batch_size) with strategy.scope(): model = tf.keras.Sequential([ tf.keras.layers.Conv2D(32, 3, activation='relu', input_shape=(28, 28, 1)), tf.keras.layers.MaxPooling2D(), tf.keras.layers.Flatten(), tf.keras.layers.Dense(64, activation='relu'), tf.keras.layers.Dense(10) ]) model.compile(loss=tf.keras.losses.SparseCategoricalCrossentropy(from_logits=True), optimizer=tf.keras.optimizers.Adam(), metrics=['accuracy']) checkpoint_dir = './training_checkpoints' # 定义用于存储检查点的检查点目录 checkpoint_prefix = os.path.join(checkpoint_dir, "ckpt_{epoch}") # 定义检查点文件的名称 # 定义一个函数来衰减学习速率。 def decay(epoch): if epoch < 3: return 1e-3 elif epoch >= 3 and epoch < 7: return 1e-4 else: return 1e-5 # 定义一个回调函数,用于在每个epoch的末尾打印学习速率 class PrintLR(tf.keras.callbacks.Callback): def on_epoch_end(self, epoch, logs=None): print('\nepoch的 {} 学习率是 {}'.format(epoch + 1, model.optimizer.lr.numpy())) # 把所有的回调放在一起 callbacks = [tf.keras.callbacks.TensorBoard(log_dir='./logs'), tf.keras.callbacks.ModelCheckpoint(filepath=checkpoint_prefix, save_weights_only=True), tf.keras.callbacks.LearningRateScheduler(decay), PrintLR()] # 训练和评估 model.fit(train_dataset, epochs=epochs, callbacks=callbacks)
保存为SavedModel格式模型,您可以使用或不使用Strategy.scope.
path = 'saved_model/' model.save(path, save_format='tf') # 加载模型,不Strategy.scope unreplicated_model = tf.keras.models.load_model(path) unreplicated_model.compile( loss=tf.keras.losses.SparseCategoricalCrossentropy(from_logits=True), optimizer=tf.keras.optimizers.Adam(), metrics=['accuracy']) eval_loss, eval_acc = unreplicated_model.evaluate(eval_dataset) print('Eval loss: {}, Eval Accuracy: {}'.format(eval_loss, eval_acc)) # 加载模型Strategy.scope with strategy.scope(): replicated_model = tf.keras.models.load_model(path) replicated_model.compile(loss=tf.keras.losses.SparseCategoricalCrossentropy(from_logits=True), optimizer=tf.keras.optimizers.Adam(), metrics=['accuracy']) eval_loss, eval_acc = replicated_model.evaluate(eval_dataset) print('Eval loss: {}, Eval Accuracy: {}'.format(eval_loss, eval_acc))
tf.distribute.Strategy和自定义训练循环
1、在mirrored_strategy.scope() 内创建模型和优化器
with mirrored_strategy.scope(): model = tf.keras.Sequential([tf.keras.layers.Dense(1, input_shape=(1,))]) optimizer = tf.keras.optimizers.SGD()
2、调用 tf.distribute.Strategy.experimental_distribute_dataset 创建分布式数据集
dataset = tf.data.Dataset.from_tensors(([1.], [1.])).repeat(100).batch(global_batch_size)
dist_dataset = mirrored_strategy.experimental_distribute_dataset(dataset)
3、使用 tf.nn.compute_average_loss 计算损失。tf.nn.compute_average_loss对每个样本损失求和并将总和除以global_batch_size。
def compute_loss(labels, predictions): per_example_loss = loss_object(labels, predictions) return tf.nn.compute_average_loss(per_example_loss, global_batch_size=global_batch_size)
4、将train_step放入 tf.distribute.Strategy.run 中,并传入之前创建的数据集
5、使用 tf.distribute.Strategy.reduce 来聚合 tf.distribute.Strategy.run。tf.distribute.Strategy.run返回每个GPU结果。您还可以tf.distribute.Strategy.experimental_local_results获取结果值列表。
def train_step(inputs): features, labels = inputs with tf.GradientTape() as tape: predictions = model(features, training=True) loss = compute_loss(labels, predictions) gradients = tape.gradient(loss, model.trainable_variables) optimizer.apply_gradients(zip(gradients, model.trainable_variables)) return loss @tf.function def distributed_train_step(dist_inputs): per_replica_losses = mirrored_strategy.run(train_step, args=(dist_inputs,)) return mirrored_strategy.reduce(tf.distribute.ReduceOp.SUM, per_replica_losses, axis=None)
6、迭代dist_dataset并循环运行训练:
for dist_inputs in dist_dataset: print(distributed_train_step(dist_inputs))
分布式训练汇总
import tensorflow as tf from tensorflow import keras from tensorflow.keras import layers import numpy as np import os strategy = tf.distribute.MirroredStrategy() # 实例化MirroredStrategy print('设备数量: {}'.format(strategy.num_replicas_in_sync)) epochs = 10 batch_size_per_replica = 64 # 每个GPU上得batch数 global_batch_size = batch_size_per_replica * strategy.num_replicas_in_sync # 总batch数 # 数据集 fashion_mnist = tf.keras.datasets.fashion_mnist (train_images, train_labels), (test_images, test_labels) = fashion_mnist.load_data() train_images = train_images[..., None] test_images = test_images[..., None] # 获取[0,1]范围内的图像 train_images = train_images / np.float32(255) test_images = test_images / np.float32(255) buffer_size = len(train_images) train_dataset = tf.data.Dataset.from_tensor_slices((train_images, train_labels)).shuffle(buffer_size).batch( global_batch_size) test_dataset = tf.data.Dataset.from_tensor_slices((test_images, test_labels)).batch(global_batch_size) train_dist_dataset = strategy.experimental_distribute_dataset(train_dataset) # 分布式数据集 test_dist_dataset = strategy.experimental_distribute_dataset(test_dataset) # 分布式数据集 # 创建模型 def create_model(): model = tf.keras.Sequential([ tf.keras.layers.Conv2D(32, 3, activation='relu'), tf.keras.layers.MaxPooling2D(), tf.keras.layers.Conv2D(64, 3, activation='relu'), tf.keras.layers.MaxPooling2D(), tf.keras.layers.Flatten(), tf.keras.layers.Dense(64, activation='relu'), tf.keras.layers.Dense(10) ]) return model # 创建一个检查点目录来存储检查点 checkpoint_dir = './training_checkpoints' checkpoint_prefix = os.path.join(checkpoint_dir, "ckpt") with strategy.scope(): # 创建训练损失 # 将reduction设置为“none”,这样我们可以在之后进行reduction,并除以全局batch size loss_object = tf.keras.losses.SparseCategoricalCrossentropy( from_logits=True, reduction=tf.keras.losses.Reduction.NONE) def compute_loss(labels, predictions): per_example_loss = loss_object(labels, predictions) return tf.nn.compute_average_loss(per_example_loss, global_batch_size=global_batch_size) test_loss = tf.keras.metrics.Mean(name='test_loss') # 创建测试损失 train_accuracy = tf.keras.metrics.SparseCategoricalAccuracy(name='train_accuracy') # 训练精度 test_accuracy = tf.keras.metrics.SparseCategoricalAccuracy(name='test_accuracy') # 测试精度 # 模型、优化器和检查点必须创建在 'strategy.scope' 下。 model = create_model() optimizer = tf.keras.optimizers.Adam() checkpoint = tf.train.Checkpoint(optimizer=optimizer, model=model) # 训练step def train_step(inputs): images, labels = inputs with tf.GradientTape() as tape: predictions = model(images, training=True) loss = compute_loss(labels, predictions) gradients = tape.gradient(loss, model.trainable_variables) optimizer.apply_gradients(zip(gradients, model.trainable_variables)) train_accuracy.update_state(labels, predictions) return loss # 测试step def test_step(inputs): images, labels = inputs predictions = model(images, training=False) t_loss = loss_object(labels, predictions) test_loss.update_state(t_loss) test_accuracy.update_state(labels, predictions) # 分布式训练 @tf.function def distributed_train_step(dataset_inputs): per_replica_losses = strategy.run(train_step, args=(dataset_inputs,)) return strategy.reduce(tf.distribute.ReduceOp.SUM, per_replica_losses, axis=None) # 分布式测试 @tf.function def distributed_test_step(dataset_inputs): return strategy.run(test_step, args=(dataset_inputs,)) for epoch in range(epochs): # 训练循环 total_loss = 0.0 num_batches = 0 for x in train_dist_dataset: total_loss += distributed_train_step(x) num_batches += 1 train_loss = total_loss / num_batches # 测试循环 for x in test_dist_dataset: distributed_test_step(x) if epoch % 10 == 0: checkpoint.save(checkpoint_prefix) print("Epoch {}, Loss: {}, Accuracy: {}, Test Loss: {}, Test Accuracy: {}".format(epoch + 1, train_loss, train_accuracy.result() * 100, test_loss.result(), test_accuracy.result() * 100)) test_loss.reset_states() train_accuracy.reset_states() test_accuracy.reset_states()
tf.distribute.Strategy 可以再没有strategy的情况下恢复最新的检查点并测试
test_dataset = tf.data.Dataset.from_tensor_slices((test_images, test_labels)).batch(global_batch_size) eval_accuracy = tf.keras.metrics.SparseCategoricalAccuracy(name='eval_accuracy') new_model = create_model() new_optimizer = tf.keras.optimizers.Adam() @tf.function def eval_step(images, labels): predictions = new_model(images, training=False) eval_accuracy(labels, predictions) checkpoint = tf.train.Checkpoint(optimizer=new_optimizer, model=new_model) checkpoint.restore(tf.train.latest_checkpoint(checkpoint_dir)) for images, labels in test_dataset: eval_step(images, labels) print('在没有strategy的情况下恢复保存的模型后的准确性: {}'.format(eval_accuracy.result() * 100))
模型部署
tensorflow-serving
TensorFlow Lite
TensorFlow Lite 是 TensorFlow 在移动和 IoT 等边缘设备端的解决方案,提供了 Java、Python 和 C++ API 库,可以运行在 Android、iOS 和 Raspberry Pi 等设备上。AI技术在边缘设备上的应用,TFLite 将会是愈发重要的角色。
目前 TFLite 只提供了推理功能,在服务器端进行训练后,经过如下简单处理即可部署到边缘设备上。
- 模型转换:由于边缘设备计算等资源有限,使用 TensorFlow 训练好的模型,模型太大、运行效率比较低,不能直接在移动端部署,需要通过相应工具进行转换成适合边缘设备的格式。
- 边缘设备部署:本节以 android 为例,简单介绍如何在 android 应用中部署转化后的模型,完成 Mnist 图片的识别。
参考
【电子书】简单粗暴 TensorFlow 2
【知乎】最全Tensorflow2.0 入门教程持续更新
【和鲸社区】30天吃掉那只TensorFlow2.0 | Github
【书籍】TensorFlow 2深度学习开源书 | PDF下载 提取码:juqs
【bilibili】tensorflow2.0入门与实战 2019年最通俗易懂的课程
【bilibili】神经网络与深度学习——TensorFlow2.0实战【中文课程】
【github】TensorFlow-Examples
【github】TensorFlow-2.x-Tutorials