点云边界提取方法总结
目录
-
- 经纬线扫描法
- 网格划分法
- 法线估计法
经纬线扫描法
经纬线扫描法的基本思想是:将经过坐标变换后的二维数据点集按照 x值的大小排序后存储在一个链表中,在二维平面建立点集的最小包围盒并分别计算出 x 和 y 的最大、最小值;令经线从 x 的最小值开始,取步长为dx,在 x 的取值范围内分别计算出每根经线的最大和最小 y 值,并将它们的索引值放在一个新建的链表中,扫描完整个 x 区间;同样的方法扫描纬线,最后将重复的索引值删掉。
下面代码在点云主法线方向和z轴夹具较小时表现较好,其他情况需要修改。
#include 网格划分法
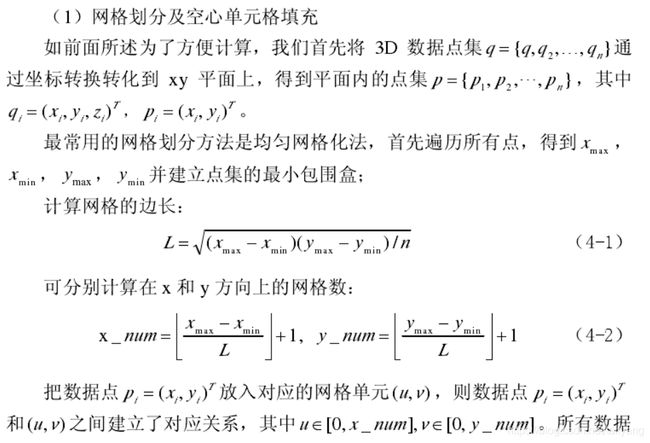
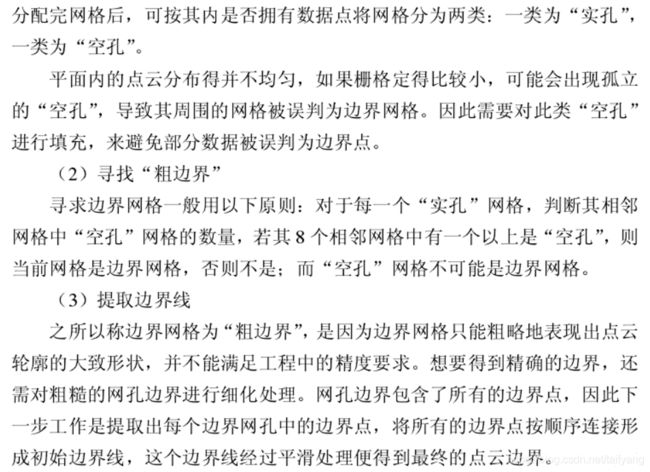
网格划分法分为三个步骤:(1)网格划分(2)寻找边界网格(3)提取边界线。首先建立数据点集的最小包围盒,并用给定间隔的矩形网格将其分割;然后找出边界网格,将这些边界网格按顺序连接起来形成一条由边界网格组成的“粗边界”;再对每个边界网格按照某种规则判断其内的点是否为边界点,连接初始边界,并对此边界线进一步处理使其光滑。
#include 法线估计法
可参考PCL:点云数据基于法线的边界提取(从最初的法线估计理论推导到最终的边界提取)
#include normEst; //其中pcl::PointXYZ表示输入类型数据,pcl::Normal表示输出类型,且pcl::Normal前三项是法向,最后一项是曲率
pcl::NormalEstimationOMP<pcl::PointXYZ, pcl::Normal> normEst;
normEst.setNumberOfThreads(12); // 手动设置线程数,否则提示错误
normEst.setInputCloud(cloud_filtered);
normEst.setSearchMethod(tree);
normEst.setRadiusSearch(std::stof(argv[3])); //法向估计的半径
//normEst.setKSearch(9); //法向估计的点数
normEst.compute(*normals);
//cout << "normal size is " << normals->size() << endl;
est.setInputCloud(cloud_filtered);
est.setInputNormals(normals);
est.setSearchMethod(tree);
est.setKSearch(500); //一般这里的数值越高,最终边界识别的精度越好
est.compute(boundaries);
pcl::PointCloud<pcl::PointXYZ>::Ptr boundPoints(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ> noBoundPoints;
int countBoundaries = 0;
for (int i = 0; i<cloud_filtered->size(); i++) {
uint8_t x = (boundaries.points[i].boundary_point);
int a = static_cast<int>(x); //该函数的功能是强制类型转换
if (a == 1)
{
(*boundPoints).push_back(cloud_filtered->points[i]);
countBoundaries++;
}
else
noBoundPoints.push_back(cloud_filtered->points[i]);
}
clock_t stop = clock();
double endtime = (double)(stop - start) / CLOCKS_PER_SEC;
std::cout << "time:" << endtime * 1000 << "ms" << std::endl;
std::cout << "boundary size is:" << countBoundaries << std::endl;
//pcl::io::savePCDFileASCII("boundary.pcd", *boundPoints);
//pcl::io::savePCDFileASCII("NoBoundpoints.pcd", noBoundPoints);
pcl::visualization::CloudViewer viewer("boundary");
viewer.showCloud(boundPoints);
while (!viewer.wasStopped())
{
}
return 0;
}
参考资料:点云的边界提取及角点检测算法研究