
作者:韩信子@ShowMeAI
教程地址:http://www.showmeai.tech/tutorials/34
本文地址:http://www.showmeai.tech/article-detail/197
声明:版权所有,转载请联系平台与作者并注明出处
引言
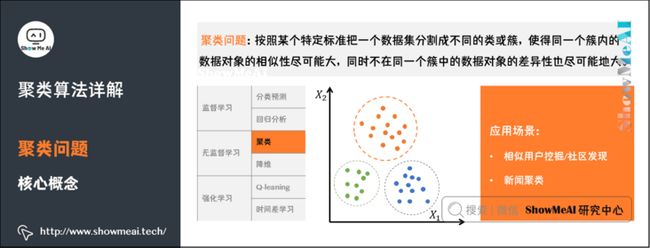
聚类(Clustering)是最常见的无监督学习算法,它指的是按照某个特定标准(如距离)把一个数据集分割成不同的类或簇,使得同一个簇内的数据对象的相似性尽可能大,同时不在同一个簇中的数据对象的差异性也尽可能地大。也即聚类后同一类的数据尽可能聚集到一起,不同类数据尽量分离。
聚类算法在很多场景下都有应用,例如新闻自动分组,用户分群,图像分割等等。很多时候,无监督的聚类算法,得到的聚类结果还可以作为特征在后续监督学习中应用,提升整体效果。本篇内容ShowMeAI带大家一起来学习一下聚类算法。
(本篇聚类算法部分内容涉及到机器学习基础知识,没有先序知识储备的宝宝可以查看ShowMeAI的文章 图解机器学习 | 机器学习基础知识。
1.聚类问题
1)聚类问题与核心概念
俗话说人以类聚物以群分,聚类算法做的事情,就是对无标签的数据,基于数据分布进行分群分组,使得相似的数据尽量落在同一个簇内。
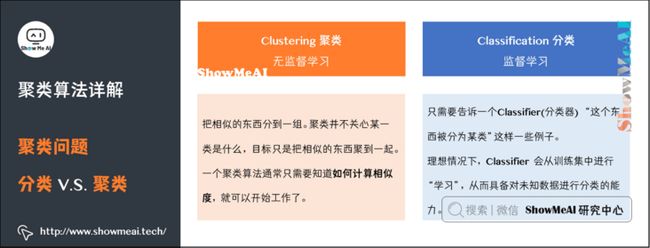
我们先对比区分一下聚类和分类:
- 聚类是一种无监督学习,而分类是一种有监督的学习。
- 聚类只需要人工指定相似度的标准和类别数就可以,而分类需要从训练集学习分类的方法。
2)聚类算法用途
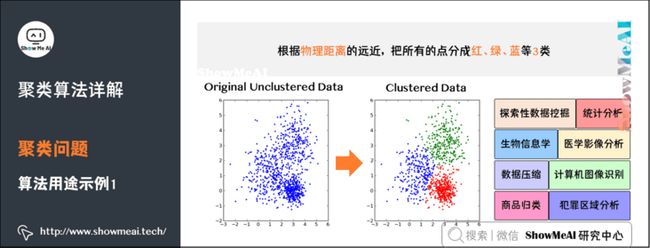
聚类算法应用非常广泛。在面对未知的世界时,先分类,再逐个研究,是人类探索未知世界的一个基本方法。聚类算法可以应用于探索性数据挖掘、统计分析、生物信息学、数据压缩、计算机图像识别、医学影像分析等,在商业领域可以用来做市场研究、商品归类,在社会科学领域可以用来做犯罪区域分析等等。
下图中有一些样本点,我们根据物理距离的远近,把所有的点分成3类。你只需要告诉算法这些信息,算法就可以按照你的要求完成聚类:
- 分类数量为3;
- 分类标准是物理距离;
- 分好的类分别用红、绿、蓝表示。
实际上,除了物理距离,现实生活中任何你能想到、计算机可以通过运算和逻辑进行判断的规则,都可以作为分类标准。
下面我们用图像压缩作为例子来解释一下。最左边是一张彩色照片,大小约1Mb,通过压缩可以把它变成几十到几百Kb,这就是压缩软件的实现过程。那么压缩软件的实现原理是什么呢?其中一种就是聚类算法。
从原始图片到压缩存储的过程如下图所示:

聚类算法同样可以用于图像分割。图像中每一个像素点是一个3维向量,对应 [R, G, B] 像素值。给定聚类中类别个数K,算法用K个不同的颜色来表示原来的图像,每个像素点用K个颜色中一个表示。具体如下:

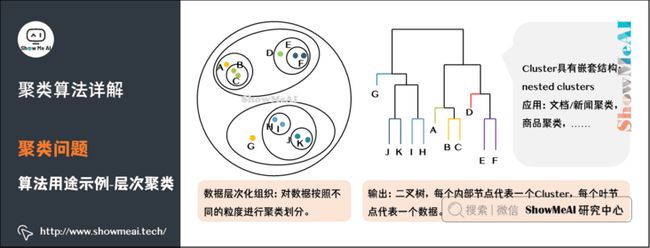
对于文档、新闻、商品而言,很多时候我们会使用嵌套的归类方法,这是一种层次化聚类:
3)主流聚类算法
我们先对聚类算法做个了解,主流的聚类算法可以分成两类:划分聚类(Partitioning Clustering)和层次聚类(Hierarchical Clustering)。他们的主要区别如图中所示:
划分聚类算法会给出一系列扁平结构的簇(分开的几个类),它们之间没有任何显式的结构来表明彼此的关联性。
- 常见算法有 K-Means/K-Medoids、Gaussian Mixture Model (高斯混合模型)、Spectral Clustering(谱聚类)、Centroid-based Clustering等。
层次聚类会输出一个具有层次结构的簇集合,因此能够比划分聚类输出的无结构簇集合提供更丰富的信息。层次聚类可以认为是是嵌套的划分聚类。
- 常见算法有 Single-linkage、Complete-linkage、Connectivity-based Clustering等。
这两类算法在聚类过程中用到的具体算法不一样,后文我们会重点展开讲一下K-Means算法、Single-linkage算法和Complete-linkage算法。

2.K-Means聚类算法
K-Means算法是聚类算法中一个非常基础的算法,同时应用又非常广泛,下面ShowMeAI给大家展开讲解算法原理。
1)K-Means算法核心概念
我们提到了聚类算法要把n个数据点按照分布分成k类(很多算法的k是人为提前设定的)。我们希望通过聚类算法得到k个中心点,以及每个数据点属于哪个中心点的划分。
- 中心点可以通过迭代算法来找到,满足条件:所有的数据点到聚类中心的距离之和是最小的。
- 中心点确定后,每个数据点属于离它最近的中心点。
在进入「如何寻找中心点」这个核心问题之前,我们先解决几个小问题:

Q1:数据点到中心点的距离如何计算?
- 我们一般选择几何距离,就是L2距离的平方。
Q2:中心点是否唯一,或者说,是不是存在全局最优解?
- 对于多个中心点的情况,全局最优是一个相当难的问题。理论上存在一个全局最优解,但是不一定能找到。既然全局最优解不好找,那我们退而求其次,看能不能找到局部最优解。
Q3:聚类结果如何表示?
- 采用空间分割的方式:将空间分割成多个多边形,每个多边形对应一个cluster中心。
2)K-Means算法步骤
K-Means采用EM算法迭代确定中心点。流程分两步:
- ① 更新中心点:初始化的时候以随机取点作为起始点;迭代过程中,取同一类的所有数据点的重心(或质心)作为新中心点。
- ② 分配数据点:把所有的数据点分配到离它最近的中心点。
重复上面的两个步骤,一直到中心点不再改变为止。过程如图所示:
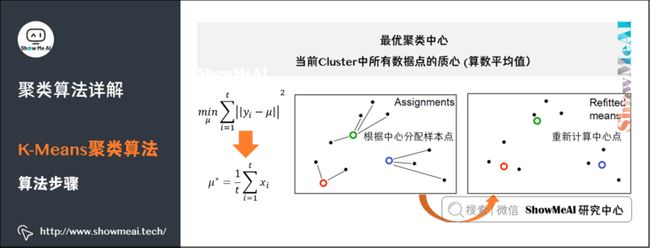
- 左侧Assignments:一开始随机选取三个点,作为三个类的中心,基于其它点和这三个中心点的距离分配簇;每一类重新计算和分配中心。
- 右侧Refitted Means:根据新的中心点,重新分配所有的数据点(原来属于绿色中心点的1个点,此次迭代后变成属于红色中心点了)。
下图的示例展示了K-Means动态迭代收敛的过程:
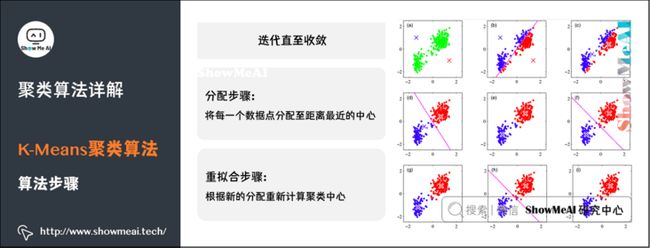
- 图(a)上有一群散落的点,我们设定簇数K=2。
图(b)为随机找2个点作为中心初始化后,第一次分类的结果。
- 可以看到,红蓝分界线在这群点的中央穿过。这显然有问题,不过没关系,算法继续往下走。对红蓝两类分别计算它们的中心。
- 图(c)可以看到,一个落在左下方这一团里,另一个落在右上方那一团里。以新的中心点进行第二次分类。
- 图(d)的分界线就基本是已经可以把两团分开了。
- 图(f)、(g)显示后续重复计算你「中心点-分类数据点」的过程已经收敛,数据点分配基本不动了,聚类完成。
下方的动图能更清晰地展示这个过程:
3.K-Means缺点与改进
1)K-Means算法缺点
K-Means算法简单易用,它有什么缺点呢?我们将K-Means算法的一些缺点总结如下:
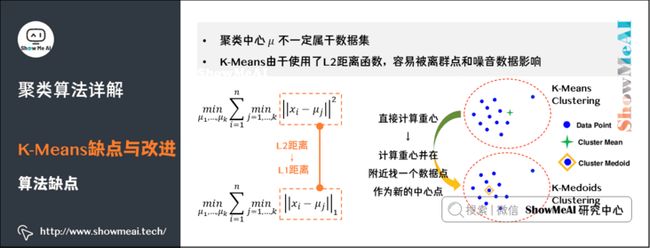
- 缺点1:中心点是所有同一类数据点的质心,所以聚类中心点可能不属于数据集的样本点。
- 缺点2:计算距离时我们用的是L2距离的平方。对离群点很敏感,噪声(Noisy Data)和离群点(Outlier)会把中心点拉偏,甚至改变分割线的位置。
2)K-Medoids算法
针对K-Means算法的缺点改进得到了K-Medoids算法:
(1)限制聚类中心点必须来自数据点。
- 求中心点的计算方法,由原来的直接计算重心,变成计算完重心后,在重心附近找一个数据点作为新的中心点。
- K-Medoids重拟合步骤比直接求平均的K-Means要复杂一些。
(2)为避免平方计算对离群点的敏感,把平方变成绝对值。
总结来说,K-Medoids算法的迭代过程与K-Means是一致的,不同点如下所示:
- 起始点不是随机点,而是任意选择数据集中的点。
- 距离使用L1距离,而不是L2距离。
- 新的中心点,也不是同类所有点的重心,而是同一类别所有数据点中,离其它点最近的点。
- 复杂度方面,相比于K-Means的 \(O(n)\) ,K-Medoids更新中心点的复杂度 \(O(n^2)\) 要更高一些。
下图是K-Means和K-Medoids两个算法的一个系统对比:

4.层次聚类算法
相比于K-Means这类划分聚类,我们有另外一类层次化聚类算法。
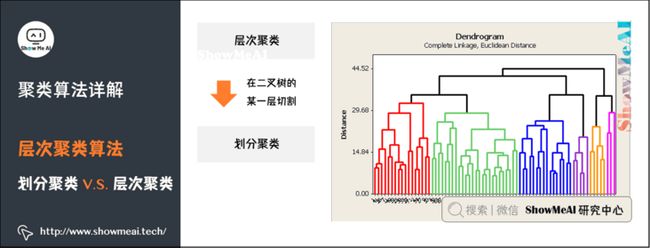
1)层次聚类vs划分聚类
划分聚类得到的是划分清晰的几个类,而层次聚类最后得到的是一个树状层次化结构。

从层次化聚类转换为划分聚类很简单,在层次化聚类的某一层进行切割,就得到1个划分聚类。如下图所示:
2)Single-Linkage 算法
接下来我们介绍一个层次聚类中的Single-Linkage算法。这个算法是构造一棵二叉树,用叶节点代表数据,而二叉树的每一个内部节点代表一个聚类。如图所示:
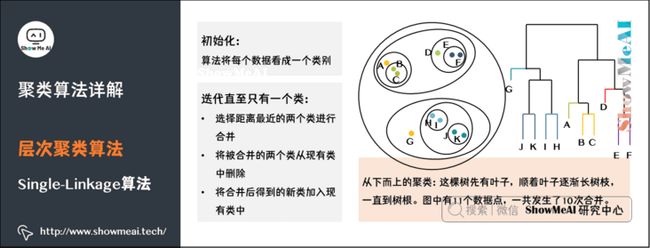
这是一个从下而上的聚类。这棵树是先有叶子,顺着叶子逐渐长树枝,树枝越长越大一直到树根。
如果叶子很多,这个生长过程需要合并的类就会很多。图中有11个数据点,一共发生了10次合并。
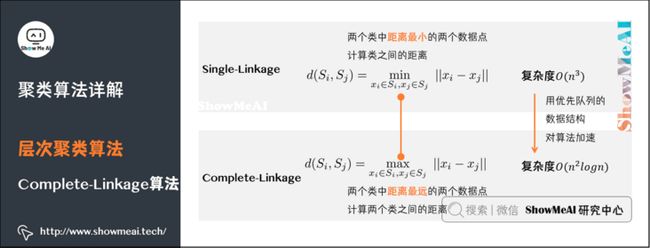
3)Complete-Linkage算法
与Single-Linkage算法相似,Complete-Linkage的迭代思路是一样的,不同的是在合并类时,Single-Linkage是用两个类中距离最小的两个点作为类之间的距离,而Complete-Linkage恰恰相反,用距离最远的两个数据点之间的距离作为这两个类之间的距离。
这两种计算方法各有利弊。总的来说,层次聚类的计算复杂度是 \(O(n^3)\) 级别,算是很高的了。可以用优先队列的数据结构对算法加速,加速后能减低到 \(O(n^{2} \log{n} )\) 的级别。
5.DB-SCAN算法
1)DB-SCAN算法
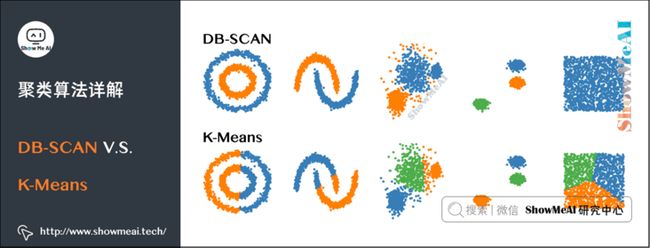
在前面的内容中我们介绍了划分聚类和层次聚类的算法,接下来我们学习另外一个聚类算法:DB-SCAN算法。
DB-SCAN是一个基于密度的聚类。如下图中这样不规则形态的点,如果用K-Means,效果不会很好。而通过DB-SCAN就可以很好地把在同一密度区域的点聚在一类中。
2)DB-SCAN算法的关键概念
核心对象(Core Object),也就是密度达到一定程度的点。
- 若 \(x_j\) 的 \(\in -\) 邻域至少包含MinPts个样本,即 \(|N_\in (x_j )|≥MinPts\) ,则 \(x_j\) 是一个核心对象。
密度直达(directly density-reachable),密度可达(density-reachable):核心对象之间可以是密度直达或者密度可达。
- 若 \(x_i\) 位于 \(x_j\) 的 \(\in -\) 邻域中,且 \(x_j\) 是核心对象,则称 \(x_j\) 由 \(x_j\) 密度直达。
- 对 \(x_i\) 与 \(x_j\) ,若存在样本序列 \(p_1,p_2, \dots, p_n\) ,其中 \(p_1=x_i\) , \(p_n=x_j\) 且 \(p_i+1\) 由 \(p_i\) 密度直达,则称 \(x_j\) 由 \(x_i\) 密度可达。
密度相连(density-connected):所有密度可达的核心点就构成密度相连。
- 对 \(x_i\) 与 \(x_j\) ,若存在 \(x_k\) 使得 \(x_i\) 与 \(x_j\) ,均由 \(x_k\) 密度可达,则称 \(x_i\) 与 \(x_j\) 密度相连。
我们通过下图深入理解一下刚才提到的几个基本概念。
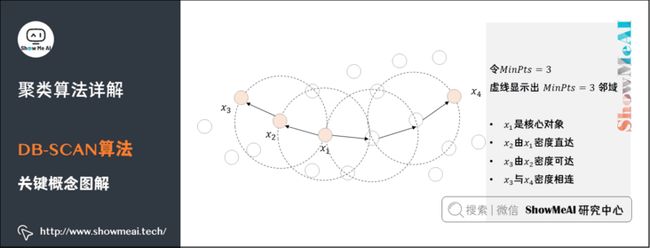
先假设要求的最小点密度MinPts是3。
- 在一个半径范围内, \(x_1\) 这个点周围的点数是5,超过了阈值3,所以 \(x_1\) 是一个核心对象。同样, \(x_2\) 、 \(x_3\) 和 \(x_4\) 也是核心对象。
- \(x_1\) 与 \(x_2\) 处于一个邻域,所以二者是密度直达的关系,而 \(x_3\) 与 \(x_2\) 也是密度直达的关系,通过 \(x_2\) , \(x_1\) 与 \(x_3\) 是密度可达的关系。
- \(x_3\) 与 \(x_4\) 通过多个核心对象实现密度相连。
3)DB-SCAN算法伪代码
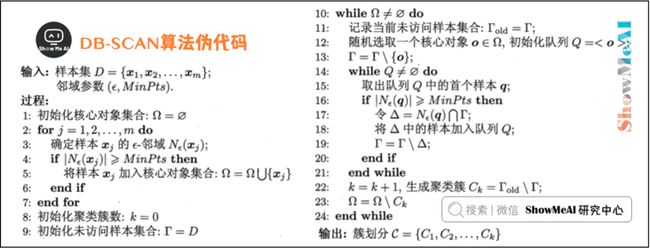
这个过程用直白的语言描述就是:
- 对于一个数据集,先规定最少点密度MinPts和半径范围。
- 先找出核心对象:如果在半径范围内点密度大于MinPts,则这个点是核心对象。把所有的核心对象放到一个集合中。
- 从这个核心对象集合中,随机找一个核心对象,判断其它的数据点与它是否密度直达,如果是,则归入聚类簇中。
- 继续判断其它点与聚类簇中的点是否密度直达,直到把所有的点都检查完毕,这时候归入聚类簇中的所有点是一个密度聚类。
更多无监督学习的算法模型总结可以查看ShowMeAI的文章 AI知识技能速查 | 机器学习-无监督学习。
视频教程
可以点击 B站 查看视频的【双语字幕】版本
https://www.bilibili.com/vide...
【双语字幕+资料下载】MIT 6.036 | 机器学习导论(2020·完整版)
ShowMeAI相关文章推荐
- 1.机器学习基础知识
- 2.模型评估方法与准则
- 3.KNN算法及其应用
- 4.逻辑回归算法详解
- 5.朴素贝叶斯算法详解
- 6.决策树模型详解
- 7.随机森林分类模型详解
- 8.回归树模型详解
- 9.GBDT模型详解
- 10.XGBoost模型最全解析
- 11.LightGBM模型详解
- 12.支持向量机模型详解
- 13.聚类算法详解
- 14.PCA降维算法详解
ShowMeAI系列教程推荐
