吴恩达深度学习第二课第二周作业及学习心得体会——minibatch、动量梯度下降、adam
概述
学习课程后,在L2正则化代码的基础上完成该周作业,现将心得体会记录如下。
Mini-batch梯度下降
概念
对m个训练样本,每次采用t(1
具体过程为:将特征X分为T个batch,每个batch的样本数为t(最后一个batch样本数不一定为t)。相应的将标签Y也如此分为T个batch。然后在每次训练时,原本是对所有样本进行一次训练;该算法则是对T个batch都进行训练,因此每次训练完所有样本,实际上都进行了T次训练。
注意为了保证没批样本的一致性,在分批前应对样本进行序号进行洗牌,随机重新分配样本的序号。
实际实现时,通常将每个batch的样本数t设置为2的整数次幂(64,128,256…)这是为了节省计算机内存。
理解
不用这种方法时:
执行一次梯度下降,向量化运算需要处理所有样本,耗时长;
当处理一次所有样本时,执行了一次梯度下降。
采用批量梯度下降算法时:
执行一次梯度下降,向量化运算需要处理t个样本,耗时短;
当处理一次所有样本时,执行了T次梯度下降。
因此可知,当样本量大时,其优点显而易见!假设有1000000个样本,如果不采用批量梯度下降法,用了20000次训练(即20000次梯度下降),才得到合适的网络;如果采用批量梯度下降法,令t=1000(则T=1000000/1000=1000),则每次训练完所有样本,实际上已经执行了1000次梯度下降,如果样本在分批时进行了随机排序处理,那么在上面的假设条件下,只需要对所有样本进行20次训练(梯度下降次数=20×1000=20000),就可以找到合适的网络。其效率明显提高。
特殊情况
当t=m(总样本数)时,等于没有分批,称作批梯度下降。
优点:最小化所有训练样本的损失函数,得到全局最优解;易于并行实现。
缺点:当样本数目很多时,训练过程会很慢。
当t=1时,每次只对一个样本进行训练,称作随机梯度下降。
优点:训练速度快。
缺点:最小化每条样本的损失函数,最终的结果往往是在全局最优解附近,不是全局最优;不易于并行实现。
代码更改
代码更改如下:
- 增加分批函数:
def random_batch(X, Y, batch_size):
batchs = []
np.random.seed(0)
m = X.shape[1]
random_index = list(np.random.permutation(m)) #random_index为一维数组,大小0~m-1,顺序随机
shuffled_X = X[:,random_index] #对X按照random_index的顺序重新排序(洗牌)
shuffled_Y = Y[:,random_index] #对Y按照random_index的顺序重新排序(洗牌)
num_batchs = int(np.floor(m/batch_size)) #计算批数
for k in range(0,num_batchs): #将洗牌后的X,Y分成num_batchs个batch
start = k * batch_size
end = (k+1) * batch_size
batch_X = shuffled_X[:,start:end]
batch_Y = shuffled_Y[:,start:end]
batch = (batch_X, batch_Y)
batchs.append(batch)
if m % batch_size != 0: #如果总样本数不能整分,将剩余样本组成最后一个batch
start = (k+1) * batch_size
end = m
batch_X = shuffled_X[:,start:end]
batch_Y = shuffled_Y[:,start:end]
batch = (batch_X, batch_Y)
batchs.append(batch)
return batchs- 模型函数:
def NN_model(X, Y, layer_dims, learning_steps, learning_rate, lambd, batch_size, print_flag):
costs=[]
batchs = random_batch(X, Y, batch_size) #将样本以batch_size分为一组batch
K = len(batchs) #batchs长度
parameters = init_para(layer_dims) #初始化参数
for i in range(0, learning_steps): #进行learning_steps次训练
for k in range(0, K):
x = batchs[k][0] #第k个batch的特征
y = batchs[k][1] #第k个batch的标签
AL, caches, L2_SUM = prop_forward(x, parameters,lambd) #前向传播,计算A1~AL
cost = compute_cost(AL,y,L2_SUM) #计算成本
grads = prop_backward(AL, y, caches, lambd) #反向传播,计算dW1~dWL,db1~dbL
parameters = update_para(parameters, grads, learning_rate) #更新参数
if print_flag==True and i%100==0:
print('cost at %i steps:%f'%(i, cost))
costs.append(cost)
return parameters,costs
实施效果
总样本数为5000,参数如下:
layer_dims = [X.shape[0],4,2,1] #NN的规模
steps = 1000 #训练次数
rate = 0.1 #训练步长
print_flag = True #打印cost标识
lambd = 0 #L2正则化系数,为0时不进行正则化
令batch_size=m,效果如下。


令batch_size=512,效果如下。


可见分批处理后,收敛速度明显变快!
动量梯度下降
概念
动量梯度下降(Gradient Descent with Momentum)是计算梯度的指数加权平均数,并利用该值来更新参数值。具体过程为:

其中的动量衰减参数β一般取0.9。

进行一般的梯度下降将会得到图中的蓝色曲线,而使用Momentum梯度下降时,通过累加减少了抵达最小值路径上的摆动,加快了收敛,得到图中红色的曲线。
当前后梯度方向一致时,Momentum梯度下降能够加速学习;前后梯度方向不一致时,Momentum梯度下降能够抑制震荡。
代码更改
在保留上面代码的基础上更改,代码更改如下:
增加初始化函数:
def init_v(parameters):
L = len(parameters)//2 #NN层数
v = {}
for l in range(L):
v["dW" + str(l+1)] = np.zeros(parameters['W' + str(l+1)].shape)
v["db" + str(l+1)] = np.zeros(parameters['b' + str(l+1)].shape)
return v更新参数函数:
def update_para(parameters, grads, v, learning_rate):
L = len(parameters)//2
beta = 0.9 #动量梯度下降系数(梯度的指数加权平均系数)
for l in range(L):
v["dW" + str(l+1)] = beta*v["dW" + str(l+1)] + (1- beta)*grads["dW" + str(l+1)]
v["db" + str(l+1)] = beta*v["db" + str(l+1)] + (1- beta)*grads["db" + str(l+1)]
parameters["W" + str(l+1)] = parameters["W" + str(l+1)] - learning_rate*v["dW" + str(l+1)]
parameters["b" + str(l+1)] = parameters["b" + str(l+1)] - learning_rate*v["db" + str(l+1)]
return parameters, v实施效果
总样本数为5000,参数如下:
layer_dims = [X.shape[0],4,2,1] #NN的规模
steps = 1000 #训练次数
rate = 0.1 #训练步长
print_flag = True #打印cost标识
lambd = 0 #L2正则化系数,为0时不进行正则化
batch_size = 512 #mini_batch_size,为1时即为随机梯度下降,为X.shape[1]时即不分批令beta=0.9,预测准确率为0.975200,效果如下。


令beta=0,预测准确率为0.970600,效果如下。

可能是样本过于简单,使用动量梯度下降时除了准确率略微提高,并没有明显变化。
Adam优化算法
概念
Adam(Adaptive Moment Estimation,自适应矩估计)优化算法适用于很多不同的深度学习网络结构,它本质上是将Momentum梯度下降和RMSProp算法结合起来。具体过程为:

其中的学习率α需要进行调参,超参数β1被称为第一阶矩,一般取0.9,β2被称为第二阶矩,一般取0.999,ϵ一般取10^−8。
代码更改
在2.4代码的基础上更改,代码更改如下:
增加初始化函数:
def init_adam(parameters):
L = len(parameters)//2 #NN层数
v = {}
s = {}
for l in range(L):
v["dW" + str(l+1)] = np.zeros(parameters['W' + str(l+1)].shape)
v["db" + str(l+1)] = np.zeros(parameters['b' + str(l+1)].shape)
s["dW" + str(l+1)] = np.zeros(parameters['W' + str(l+1)].shape)
s["db" + str(l+1)] = np.zeros(parameters['b' + str(l+1)].shape)
return v,s更新参数函数:
def update_para(parameters, grads, v, s, learning_rate):
L = len(parameters)//2
v_corrected = {}
s_corrected = {}
t=2 #t不能为0!
beta1=0.9
beta2=0.999
epsilon=1e-8
for l in range(L):
v["dW" + str(l+1)] = beta1*v["dW" + str(l+1)] + (1- beta1)*grads["dW" + str(l+1)]
v["db" + str(l+1)] = beta1*v["db" + str(l+1)] + (1- beta1)*grads["db" + str(l+1)]
v_corrected["dW" + str(l+1)] = v["dW" + str(l+1)]/(1-beta1**t)
v_corrected["db" + str(l+1)] = v["db" + str(l+1)]/(1-beta1**t)
s["dW" + str(l+1)] = beta2*s["dW" + str(l+1)] + (1- beta2)*(grads['dW' + str(l + 1)]**2)
s["db" + str(l+1)] = beta2*s["db" + str(l+1)] + (1- beta2)*(grads['db' + str(l + 1)]**2)
s_corrected["dW" + str(l+1)] = s["dW" + str(l+1)]/(1-beta2**t)
s_corrected["db" + str(l+1)] = s["db" + str(l+1)]/(1-beta2**t)
parameters['W' + str(l+1)] = parameters['W' + str(l+1)] - learning_rate*v_corrected["dW" + str(l+1)]/(np.sqrt(s_corrected["dW" + str(l+1)])+epsilon)
parameters['b' + str(l+1)] = parameters['b' + str(l+1)] - learning_rate*v_corrected["db" + str(l+1)]/(np.sqrt(s_corrected["db" + str(l+1)])+epsilon)
return parameters, v, s实施效果
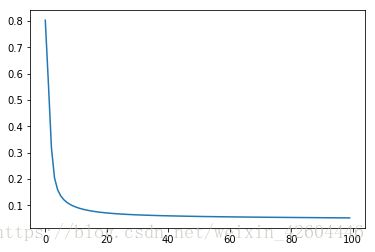
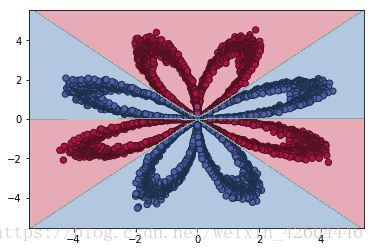
总样本数为5000。采用adam算法,参数如下。
layer_dims = [X.shape[0],4,2,1] #NN的规模
steps = 100 #训练次数
rate = 0.01 #训练步长
print_flag = True #打印cost标识
lambd = 0 #L2正则化系数,为0时不进行正则化
batch_size = 512 #mini_batch_size,为1时即为随机梯度下降,为X.shape[1]时即不分批步长减至0.01,训练次数减至100,即可得到合适的网络,效果如下(每10次全样本训练记录一次cost)。

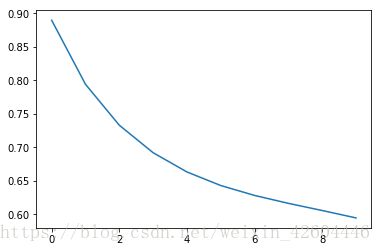
同样的参数,使用动量梯度下降时100次全样本训练后并未收敛,效果如下(每10次全样本训练记录一次cost,注意左下图纵轴范围0.6~0.9)。
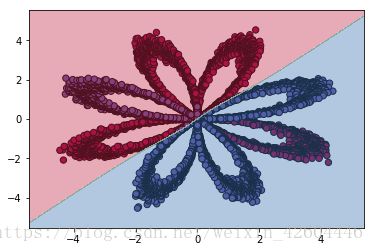
可见同样的参数时,adam的收敛速度快很多!
总结
从上面的分析和试验,可知上述措施能够有效的优化神经网络,令神经网络训练时可以更快收敛。
附
相关代码可以在我的资源中下载!希望能帮到大家!