Jetson Nano b1双目立体
[更新中]
0. CSI-Camera
Jetson Nano b1支持双路的CSI接口,同时插上两个相机120度视场的IMX219模块组成双目摄像头。
关于相机程序github上已有代码。包括单目、双目、人脸识别。可以自行测试
1. 采集&保存
在代码的基础上加入opencv保存图片的部分,文件名为left1.bmp、left2.bmp、left3.bmp…;right1.bmp、right2.bmp、right3.bmp… 对应好左右视图
cams_save.py
# MIT License
# Copyright (c) 2019,2020 JetsonHacks
# See license
# A very simple code snippet
# Using two CSI cameras (such as the Raspberry Pi Version 2) connected to a
# NVIDIA Jetson Nano Developer Kit (Rev B01) using OpenCV
# Drivers for the camera and OpenCV are included in the base image in JetPack 4.3+
# This script will open a window and place the camera stream from each camera in a window
# arranged horizontally.
# The camera streams are each read in their own thread, as when done sequentially there
# is a noticeable lag
# For better performance, the next step would be to experiment with having the window display
# in a separate thread
import cv2
import threading
import numpy as np
# gstreamer_pipeline returns a GStreamer pipeline for capturing from the CSI camera
# Flip the image by setting the flip_method (most common values: 0 and 2)
# display_width and display_height determine the size of each camera pane in the window on the screen
left_camera = None
right_camera = None
class CSI_Camera:
def __init__(self):
# Initialize instance variables
# OpenCV video capture element
self.video_capture = None
# The last captured image from the camera
self.frame = None
self.grabbed = False
# The thread where the video capture runs
self.read_thread = None
self.read_lock = threading.Lock()
self.running = False
def open(self, gstreamer_pipeline_string):
try:
self.video_capture = cv2.VideoCapture(
gstreamer_pipeline_string, cv2.CAP_GSTREAMER
)
except RuntimeError:
self.video_capture = None
print("Unable to open camera")
print("Pipeline: " + gstreamer_pipeline_string)
return
# Grab the first frame to start the video capturing
self.grabbed, self.frame = self.video_capture.read()
def start(self):
if self.running:
print('Video capturing is already running')
return None
# create a thread to read the camera image
if self.video_capture != None:
self.running = True
self.read_thread = threading.Thread(target=self.updateCamera)
self.read_thread.start()
return self
def stop(self):
self.running = False
self.read_thread.join()
def updateCamera(self):
# This is the thread to read images from the camera
while self.running:
try:
grabbed, frame = self.video_capture.read()
with self.read_lock:
self.grabbed = grabbed
self.frame = frame
except RuntimeError:
print("Could not read image from camera")
# FIX ME - stop and cleanup thread
# Something bad happened
def read(self):
with self.read_lock:
frame = self.frame.copy()
grabbed = self.grabbed
return grabbed, frame
def release(self):
if self.video_capture != None:
self.video_capture.release()
self.video_capture = None
# Now kill the thread
if self.read_thread != None:
self.read_thread.join()
# Currently there are setting frame rate on CSI Camera on Nano through gstreamer
# Here we directly select sensor_mode 3 (1280x720, 59.9999 fps)
def gstreamer_pipeline(
sensor_id=0,
sensor_mode=3,
capture_width=1280,
capture_height=720,
display_width=1280,
display_height=720,
framerate=30,
flip_method=0,
):
return (
"nvarguscamerasrc sensor-id=%d sensor-mode=%d ! "
"video/x-raw(memory:NVMM), "
"width=(int)%d, height=(int)%d, "
"format=(string)NV12, framerate=(fraction)%d/1 ! "
"nvvidconv flip-method=%d ! "
"video/x-raw, width=(int)%d, height=(int)%d, format=(string)BGRx ! "
"videoconvert ! "
"video/x-raw, format=(string)BGR ! appsink"
% (
sensor_id,
sensor_mode,
capture_width,
capture_height,
framerate,
flip_method,
display_width,
display_height,
)
)
def start_cameras():
left_camera = CSI_Camera()
left_camera.open(gstreamer_pipeline(sensor_id=0, sensor_mode=3, flip_method=0,display_height=360, display_width=640,))
left_camera.start()
right_camera = CSI_Camera()
right_camera.open(gstreamer_pipeline(sensor_id=1, sensor_mode=3, flip_method=0,display_height=360, display_width=640,))
right_camera.start()
cv2.namedWindow("CSI Cameras", cv2.WINDOW_AUTOSIZE)
if (not left_camera.video_capture.isOpened() or
not right_camera.video_capture.isOpened()):
# Cameras did not open, or no camera attached
print("Unable to open any cameras")
# TODO: Proper Cleanup
SystemExit(0)
start = time.time()
count = 0
while cv2.getWindowProperty("CSI Cameras", 0) >= 0:
_, left_image = left_camera.read()
_, right_image = right_camera.read()
camera_images = np.hstack((left_image, right_image))
cv2.imshow("CSI Cameras", camera_images)
# This also acts as
keyCode = cv2.waitKey(30) & 0xFF
# Stop the program on the ESC key
end = time.time()
if keyCode == ord('s'):#按s保存
count+=1
cv2.imwrite('./pic/left'+str(count)+'.bmp', left_image)
cv2.imwrite('./pic/right'+str(count)+'.bmp', right_image)
# break
if keyCode == 27: #esc退出
break
left_camera.stop()
left_camera.release()
right_camera.stop()
right_camera.release()
cv2.destroyAllWindows()
if __name__ == "__main__":
start_cameras()
运行后,按键盘上s,即可保存当前显示的左右视图到pic文件夹;esc即可退出程序
2. 立体标定
2.1 相机内外参标定
借助matlab的标定工具箱进行。
2.1.1 将pic文件夹的所有图片放到。解压到TOOLBOX_calib下。
2.1.2 matlab打开到此路径下,命令行输入
calib_gui
弹出:
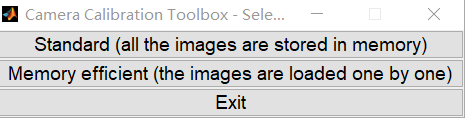
2.1.3.选择Standard.出现:

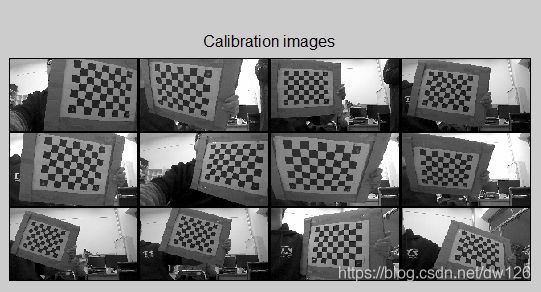
2.1.4 首先使用左边相机采集到的图片进行标定
点击Image names,转到命令行
命令行窗口会提示你输入图片的名:left 回车
根据自己的图片格式继续输入 b

matlab会自动载入所有left开头的图片,如图我这里有12张图片
2.1.5 提取网格角点
选择所有图像,设置finder尺寸等

在弹出的figure窗口点选角点,会自动选出区域

此时,看命令行! 根据自己的棋盘格大小,设置参数,我这里是26mm
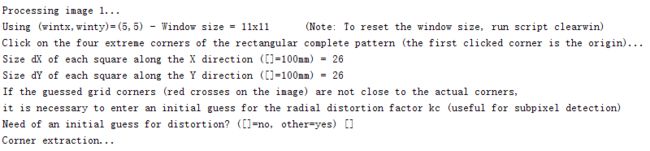
所有左视图片来一遍,完成

2.1.6 回到gui,点击标定

也可以可视化外参show extrinsic
重要! Save 保存为.mat文件

2.1.7
为便于后面立体标定,修改上述文件名为Calib_Results_left.mat
重复5-6的过程,left改为right,并将这次保存的参数文件改为Calib_Results_right.mat
2.2 执行立体标定
关闭calib_gui,命令行输入stereo_gui,会提示分别输入左右视图的标定文件

按run stereo calibration
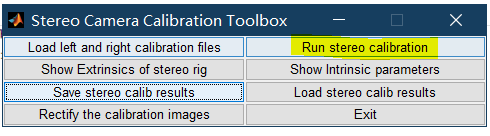
得到
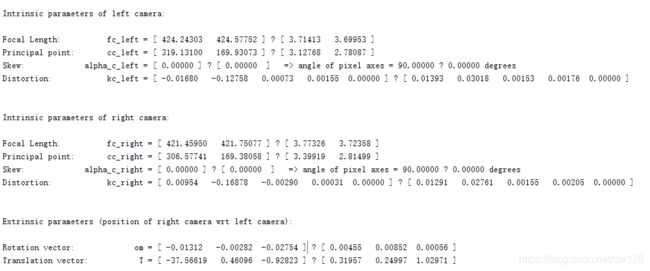
3.调整参数并显示深度图
camera_configs.py
import cv2
import numpy as np
left_camera_matrix = np.array([[424.24303, 0., 319.13100 ],
[0., 424.57752 ,169.93073 ],
[0., 0., 1.]])
left_distortion = np.array([[ -0.01680, -0.12758 , 0.00073 , 0.00155 ,0.00000]])
right_camera_matrix = np.array([[ 421.45950, 0., 306.57741 ],
[0., 421.75077 , 169.38058 ],
[0., 0., 1.]])
right_distortion = np.array([[0.00954 , -0.16878 , -0.00290 , 0.00031 ,0.00000 ]])
om = np.array([ -0.01312 , -0.00282 ,-0.02754 ]) # 旋转关系向量
R = cv2.Rodrigues(om)[0] # 使用Rodrigues变换将om变换为R
T = np.array([ -37.56619 , 0.46096 , -0.92823]) # 平移关系向量
size = (720, 1280) # 图像尺寸
# 进行立体更正
R1, R2, P1, P2, Q, validPixROI1, validPixROI2 = cv2.stereoRectify(left_camera_matrix, left_distortion,
right_camera_matrix, right_distortion, size, R,
T)
# 计算更正map
left_map1, left_map2 = cv2.initUndistortRectifyMap(left_camera_matrix, left_distortion, R1, P1, size, cv2.CV_16SC2)
right_map1, right_map2 = cv2.initUndistortRectifyMap(right_camera_matrix, right_distortion, R2, P2, size, cv2.CV_16SC2)
实时生成深度图使用BM算法
import cv2
import time
import numpy as np
import camera_configs
import threading
left_camera = None
right_camera = None
class CSI_Camera:
def __init__(self):
# Initialize instance variables
# OpenCV video capture element
self.video_capture = None
# The last captured image from the camera
self.frame = None
self.grabbed = False
# The thread where the video capture runs
self.read_thread = None
self.read_lock = threading.Lock()
self.running = False
def open(self, gstreamer_pipeline_string):
try:
self.video_capture = cv2.VideoCapture(
gstreamer_pipeline_string, cv2.CAP_GSTREAMER
)
except RuntimeError:
self.video_capture = None
print("Unable to open camera")
print("Pipeline: " + gstreamer_pipeline_string)
return
# Grab the first frame to start the video capturing
self.grabbed, self.frame = self.video_capture.read()
def start(self):
if self.running:
print('Video capturing is already running')
return None
# create a thread to read the camera image
if self.video_capture != None:
self.running = True
self.read_thread = threading.Thread(target=self.updateCamera)
self.read_thread.start()
return self
def stop(self):
self.running = False
self.read_thread.join()
def updateCamera(self):
# This is the thread to read images from the camera
while self.running:
try:
grabbed, frame = self.video_capture.read()
with self.read_lock:
self.grabbed = grabbed
self.frame = frame
except RuntimeError:
print("Could not read image from camera")
# FIX ME - stop and cleanup thread
# Something bad happened
def read(self):
with self.read_lock:
frame = self.frame.copy()
grabbed = self.grabbed
return grabbed, frame
def release(self):
if self.video_capture != None:
self.video_capture.release()
self.video_capture = None
# Now kill the thread
if self.read_thread != None:
self.read_thread.join()
# Currently there are setting frame rate on CSI Camera on Nano through gstreamer
# Here we directly select sensor_mode 3 (1280x720, 59.9999 fps)
def gstreamer_pipeline(
sensor_id=0,
sensor_mode=3,
capture_width=1280,
capture_height=720,
display_width=1280,
display_height=720,
framerate=30,
flip_method=0,
):
return (
"nvarguscamerasrc sensor-id=%d sensor-mode=%d ! "
"video/x-raw(memory:NVMM), "
"width=(int)%d, height=(int)%d, "
"format=(string)NV12, framerate=(fraction)%d/1 ! "
"nvvidconv flip-method=%d ! "
"video/x-raw, width=(int)%d, height=(int)%d, format=(string)BGRx ! "
"videoconvert ! "
"video/x-raw, format=(string)BGR ! appsink"
% (
sensor_id,
sensor_mode,
capture_width,
capture_height,
framerate,
flip_method,
display_width,
display_height,
)
)
def start_cameras():
cv2.namedWindow('bar')
cv2.createTrackbar("num", "bar", 0, 10, lambda x: None)
cv2.createTrackbar("blockSize", "bar", 5, 255, lambda x: None)
def callbackFunc(e, x, y, f, p):
if e == cv2.EVENT_LBUTTONDOWN:
print(threeD[y][x])
cv2.setMouseCallback("CSI Cameras", callbackFunc, None)
left_camera = CSI_Camera()
left_camera.open(gstreamer_pipeline(sensor_id=0, sensor_mode=3, flip_method=0,
display_height=360, display_width=640,))
left_camera.start()
right_camera = CSI_Camera()
right_camera.open(gstreamer_pipeline(sensor_id=1, sensor_mode=3, flip_method=0,
display_height=360, display_width=640,))
right_camera.start()
if (not left_camera.video_capture.isOpened() or
not right_camera.video_capture.isOpened()):
# Cameras did not open, or no camera attached
print("Unable to open any cameras")
# TODO: Proper Cleanup
SystemExit(0)
start = time.time()
count = 0
while cv2.getWindowProperty("CSI Cameras", 0) >= 0:
_, left_image = left_camera.read()
_, right_image = right_camera.read()
# 根据更正map对图片进行重构
img1_rectified = cv2.remap(left_image, camera_configs.left_map1, camera_configs.left_map2, cv2.INTER_LINEAR)
img2_rectified = cv2.remap(right_image, camera_configs.right_map1, camera_configs.right_map2, cv2.INTER_LINEAR)
# 将图片置为灰度图,为StereoBM作准备
imgL = cv2.cvtColor(img1_rectified, cv2.COLOR_BGR2GRAY)
imgR = cv2.cvtColor(img2_rectified, cv2.COLOR_BGR2GRAY)
# 两个trackbar用来调节不同的参数查看效果
num = cv2.getTrackbarPos("num", "depth")
blockSize = cv2.getTrackbarPos("blockSize", "depth")
if blockSize % 2 == 0:
blockSize += 1
if blockSize < 5:
blockSize = 5
# 根据Block Maching方法生成差异图
stereo = cv2.StereoBM_create(numDisparities=16 * num, blockSize=blockSize)
disparity = stereo.compute(imgL, imgR)
disp = cv2.normalize(disparity, disparity, alpha=0, beta=255, norm_type=cv2.NORM_MINMAX, dtype=cv2.CV_8U)
# camera_images = np.vstack((left_image, disp))
cv2.imshow("CSI Cameras", disp)
# This also acts as
keyCode = cv2.waitKey(10) & 0xFF
# Stop the program on the ESC key
if keyCode == 27: # or end - start > 10:
break
left_camera.stop()
left_camera.release()
right_camera.stop()
right_camera.release()
cv2.destroyAllWindows()
if __name__ == "__main__":
start_cameras()
效果图:

未完待续…
参考
https://blog.csdn.net/sunanger_wang/article/details/7744025