RIKIBOT智能小车关于环境变量的配置
目录
- 一、简介
- 二、打开环境变量配置文件
- 三、相关环境变量的解释
-
- 1、CUDA路径设置
- 2、ROS环境变量
- 3、ROS的网络配置
- 4、车型指定与导航算法指定
- 5、 雷达型号指定
- 6、摄像头的指定
- 7、摄像头的校正
- 8、手眼标定
- 9、网络全局代理设置
- 四、交流方式
一、简介
对于刚拿到RIKIBOT智能小车用户来说,接好显示器配置好网络后,接下来需要做的是bash环境变量的配置,这里涉及到车型与导航算法的一些相关配置。这里以RIKIBOT-X4系列jetson系列主控做为说明,打开bash文件做一下简要的说明。

二、打开环境变量配置文件
用你自己熟悉的文件编辑器打开bashrc文件,vim或者gedit都行
$ vim .bashrc

三、相关环境变量的解释
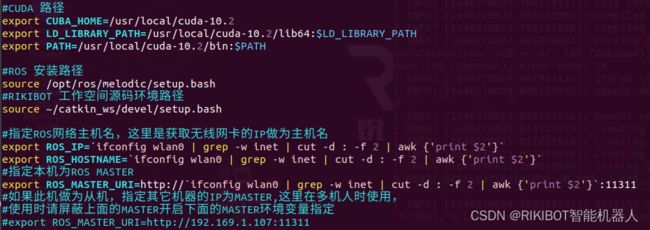
1、CUDA路径设置
这里是jetson系列用户专用的环境变量配置,像树莓派或者不带GPU的工控机是不需要此项的,这里的CUDA版本是10.2版本
export CUBA_HOME=/usr/local/cuda-10.2
export LD_LIBRARY_PATH=/usr/local/cuda-10.2/lib64:$LD_LIBRARY_PATH
export PATH=/usr/local/cuda-10.2/bin:$PATH
2、ROS环境变量
这里是系统安装的ROS路径,可以看出版本是melodic版本
source /opt/ros/melodic/setup.bash
这个是RIKIBOT的工控空间环境路径,也就是用户创建的路径,catkin_ws/src目录下面放的相关的源码包。
source ~/catkin_ws/devel/setup.bash
3、ROS的网络配置
这里的ROS网络与前面的系统网络是有区分的,系统网络是网卡的联网,就像你手机联网一样,联网后系统才能正常与外界通信,而ROS网络是相当于配置ROS通信的网络,大家不要与系统网络设置搞混淆
,下面是通过脚本的方式或取无线网卡wlan0的IP,如果用户是其它的网卡做为ROS通信可以设置其它的网卡,如果是纯本机使用可以直接使用回环地址localhost(127.0.0.1)做为本机ROS通信
export ROS_IP=
ifconfig wlan0 | grep -w inet | cut -d : -f 2 | awk {'print $2'}
export ROS_HOSTNAME=ifconfig wlan0 | grep -w inet | cut -d : -f 2 | awk {'print $2'}
这里指定MASTER,也就是ROS网络的主服务节点,这个与roscore启动相关,如果是纯本机使用也可以像上面一样用回环地址
export ROS_MASTER_URI=http://
ifconfig wlan0 | grep -w inet | cut -d : -f 2 | awk {'print $2'}:11311
指定其它机器做为MASTER这里主要是在多机器人时使用,
#export ROS_MASTER_URI=http://192.169.1.107:11311
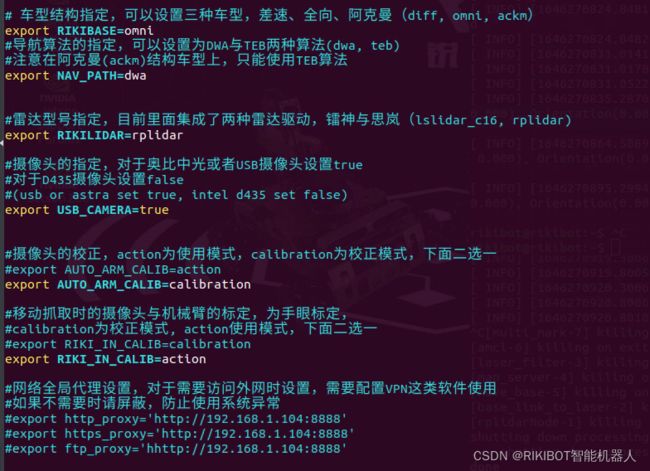
4、车型指定与导航算法指定
这里的环境变量是2022年3月份以后的系统做的更新与添加,根据车型,可以指定为差速车型(可以原地旋转、但不能横移与斜移的车)、全向轮车型(麦克纳母轮与来福轮都是全向轮,简单的说就是可以让车横着与斜着移动的车型),阿克曼车型(前轮为舵机转向的车),这里根据用户拿到的车自己做更改,系统默认是全向轮车型
export RIKIBASE=omni
导航算法设置,目前支持teb与dwa两种导航算法,这里特别注意阿克曼车型只能设置为teb导航算法,差速与全向轮车型可以支持两种算法,全向轮的TEB算法可以支持导航横移。
export NAV_PATH=dwa
5、 雷达型号指定
目前里面集成了两种雷达驱动,镭神16线激光雷达与思岚(lslidar_c16, rplidar)
export RIKILIDAR=rplidar
6、摄像头的指定
对于奥比中光或者USB摄像头设置true,对于intel D435摄像头设置false
export USB_CAMERA=true
7、摄像头的校正
action为使用模式,calibration为校正模式,下面二选一
#export AUTO_ARM_CALIB=action
export AUTO_ARM_CALIB=calibration
8、手眼标定
移动抓取时的摄像头与机械臂的标定,即手眼标定,calibration为校正模式, action使用模式,下面二选一
#export RIKI_IN_CALIB=calibration
export RIKI_IN_CALIB=action
9、网络全局代理设置
对于需要访问外网时设置,需要配置VPN这类软件使用如果不需要时请屏蔽,防止使用系统异常,使用完屏蔽后请重启系统,才能生效
#export http_proxy=‘http://192.168.1.104:8888’
#export https_proxy=‘http://192.168.1.104:8888’
#export ftp_proxy=‘hhttp://192.168.1.104:8888’
四、交流方式
QQ交流群:130486387
RIKIBOT店铺连接