pytorch实现autoencoder无监督学习
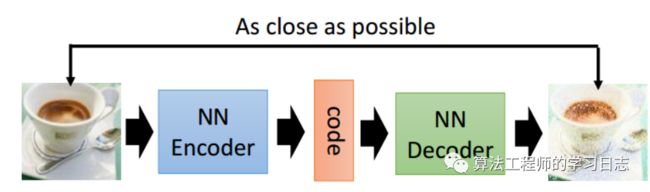
自动编码器讲述的是对于一副输入的图像,或者是其他的信号,经过一系列操作,比如卷积,或者linear变换,变换得到一个向量,这个向量就叫做对这个图像的编码,这个过程就叫做encoder,对于一个特定的编码,经过一系列反卷积或者是线性变换,得到一副图像,这个过程叫做decoder,即解码。
所以现在自动编码器主要应用有两个方面,第一是数据去噪,第二是进行可视化降维。自动编码器还有着一个功能就是生成数据。
自动编码器是一种无监督的神经网络模型,它可以学习到输入数据的隐含特征,这称为编码(coding),同时用学习到的新特征可以重构出原始输入数据,称之为解码(decoding)。从直观上来看,自动编码器可以用于特征降维,类似主成分分析PCA,但是其相比PCA其性能更强,这是由于神经网络模型可以提取更有效的新特征。除了进行特征降维,自动编码器学习到的新特征可以送入有监督学习模型中,所以自动编码器可以起到特征提取器的作用。作为无监督学习模型,自动编码器还可以用于生成与训练样本不同的新数据,这样自动编码器(变分自动编码器,Variational Autoencoders)就是生成式模型。
自动编码器原理
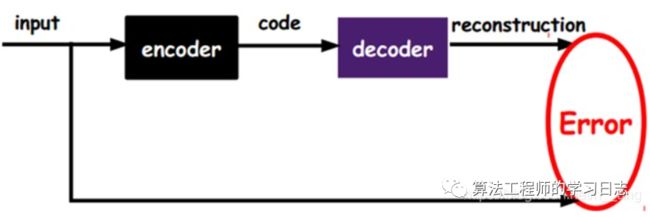
自动编码器的基本结构如图1所示,包括编码和解码两个过程:

自动编码器是将输入x进行编码,得到新的特征y,并且希望原始的输入x能够从新的特征y重构出来。编码过程如下:
Y = f(Wx+b)
可以看到,和神经网络结构一样,其编码就是线性组合之后加上非线性的激活函数。如果没有非线性的包装,那么自动编码器就和普通的PCA没有本质区别了。利用新的特征y,可以对输入x重构,即解码过程:
x' = f(W'Y+b')
我们希望重构出的x'和x尽可能一致,可以采用最小化负对数似然的损失函数来训练这个模型:
L = logP(x/x')
import torchimport torchvisionfrom torch import nnfrom torch.autograd import Variablefrom torch.utils.data import DataLoaderfrom torchvision import transformsfrom torchvision.utils import save_imagefrom torchvision.datasets import MNISTimport osif not os.path.exists('./dc_img'):os.mkdir('./dc_img')def to_img(x):x = 0.5 * (x + 1)x = x.clamp(0, 1)x = x.view(x.size(0), 1, 28, 28)return xnum_epochs = 100batch_size = 128learning_rate = 1e-3img_transform = transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])dataset = MNIST('./data', transform=img_transform)dataloader = DataLoader(dataset, batch_size=batch_size, shuffle=True)class autoencoder(nn.Module):def __init__(self):super(autoencoder, self).__init__()self.encoder = nn.Sequential(nn.Conv2d(1, 16, 3, stride=3, padding=1), # b, 16, 10, 10nn.ReLU(True),nn.MaxPool2d(2, stride=2), # b, 16, 5, 5nn.Conv2d(16, 8, 3, stride=2, padding=1), # b, 8, 3, 3nn.ReLU(True),nn.MaxPool2d(2, stride=1) # b, 8, 2, 2)self.decoder = nn.Sequential(nn.ConvTranspose2d(8, 16, 3, stride=2), # b, 16, 5, 5nn.ReLU(True),nn.ConvTranspose2d(16, 8, 5, stride=3, padding=1), # b, 8, 15, 15nn.ReLU(True),nn.ConvTranspose2d(8, 1, 2, stride=2, padding=1), # b, 1, 28, 28nn.Tanh())def forward(self, x):x = self.encoder(x)x = self.decoder(x)return xmodel = autoencoder().cuda()criterion = nn.MSELoss()optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate,weight_decay=1e-5)for epoch in range(num_epochs):for data in dataloader:img, _ = dataimg = Variable(img).cuda()# ===================forward=====================output = model(img)loss = criterion(output, img)# ===================backward====================optimizer.zero_grad()loss.backward()optimizer.step()# ===================log========================print('epoch [{}/{}], loss:{:.4f}'.format(epoch+1, num_epochs, loss.data[0]))if epoch % 10 == 0:pic = to_img(output.cpu().data)save_image(pic, './dc_img/image_{}.png'.format(epoch))torch.save(model.state_dict(), './conv_autoencoder.pth')