group convolution (分组卷积)详解
文章目录
- 【普通卷积】
- 【group convolution (分组卷积)】
- 【深度可分离卷积】
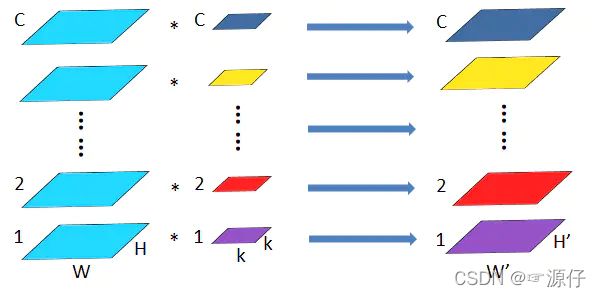
【普通卷积】

上图为普通卷积示意图,为方便理解,图中只有一个卷积核,此时输入
输出数据为:输入feature map尺寸: W × H × C W×H×C W×H×C ,分别对应feature map的宽,高,通道数;
单个卷积核尺寸: k × k × C k×k×C k×k×C ,分别对应单个卷积核的宽,高,通道数;
输出feature map尺寸 : W ′ × H ′ W'×H' W′×H′ ,输出通道数等于卷积核数量,输出的宽和高与卷积步长有关,这里不关心这两个值。
参数量: p a r a m s = k 2 C params=k^2C params=k2C
运算量: F L O P s = k 2 C W ′ H ′ FLOPs=k^2CW'H' FLOPs=k2CW′H′,这里只考虑浮点乘数量,不考虑浮点加。
【group convolution (分组卷积)】


将图一卷积的输入feature map分成组,每个卷积核也相应地分成组,在对应的组内做卷积,如上图2所示,图中分组数,即上面的一组feature map只和上面的一组卷积核做卷积,下面的一组feature map只和下面的一组卷积核做卷积。每组卷积都生成一个feature map,共生成个feature map。
假设input.shape = [$C_1$, H, W] output.shape = [$C_2$, $H^1$, $W^1$]
输入每组feature map尺寸: W × H × C 1 g W×H× \frac {C_1} {g} W×H×gC1 ,共有g组。
单个卷积核每组的尺寸: k × k × C 2 g k×k×\frac {C_2} {g} k×k×gC2,一个卷积核被分成了g组。
输出feature map尺寸: W 1 × H 1 × g W^1×H^1×g W1×H1×g,共生成g个feature map。
现在我们再来计算一下常规卷积的参数量和运算量:
参数量 p a r a m s = k × k × C 1 × C 2 params=k\times k\times C_1 \times C_2 params=k×k×C1×C2
运算量 F L O P s = k 2 × C 1 × C 2 W 1 × H 1 = k 2 C 1 C 2 W 1 H 1 FLOPs=k^2\times C1 ×C_2W^1×H^1=k^2C_1C_2W^1H^1 FLOPs=k2×C1×C2W1×H1=k2C1C2W1H1
现在我们再来计算一下分组卷积时的参数量和运算量:
参数量 p a r a m s = k 2 × C 1 g × C 2 g × g = k 2 C 1 g C 2 params=k^2×\frac {C_1} {g}×\frac{C_2}{g}\times g=k^2\frac{C_1}{g} C_2 params=k2×gC1×gC2×g=k2gC1C2
运算量 F L O P s = k 2 × C 1 g C 2 × W 1 × H 1 = k 2 C 1 g C 2 W 1 H 1 FLOPs=k^2×\frac {C_1} {g} C_2×W^1×H^1=k^2\frac{C_1}{g} C_2W^1H^1 FLOPs=k2×gC1C2×W1×H1=k2gC1C2W1H1
上面的例子我们可以清楚地看到,得到相同的output.shape,分组卷积的参数量是常规卷积的1/g,其中g是分组的个数(上图中是两个)。
- 分析:
利用分层过滤组提高CNN效率论文地址
官方分析:Alex认为group conv的方式能够增加 filter之间的对角相关性,而且能够减少训练参数,不容易过拟合,这类似于正则的效果。 - 代码实现(pytorch提供了相关参数,以2d为例)
import torch
import torch.nn as nn
...
model = nn.Conv2d(in_channels = in_channel, out_channels = out_channel,
kernel_size = kernel_size, stride = stride, padding = 1, dilation = dilation, group = group_num)
【深度可分离卷积】
MobileNets:论文地址
深度可分离卷积是MobileNet的精髓,它由deep_wise卷积和point_wise卷积两部分组成。我以前一直觉得深度可分离卷积是极端化的分组卷积(把group数量设为Cin个就行)。但今天再次思考一下,发现他们很大的不同在于,分组卷积只进行一次卷积(一个nn.Conv2d即可实现),不同group的卷积结果concat即可,而深度可分离卷积是进行了两次卷积操作,第一次先进行deep_wise卷积(即收集每一层的特征),kernel_size = KK1,第一次卷积总的参数量为KKCin,第二次是为了得到Cout维度的输出,kernel_size = 11Cin,第二次卷积总的参数量为11Cin*Cout。第二次卷积输出即为深度可分离卷积的输出。
以下就是论文中提到的深度可分离卷积可视化图:

- 举例
举个例子比较参数量:假设input.shape = [ c 1 c_1 c1, H, W] output.shape = [ c 2 c_2 c2, H, W]
(a)常规卷积参数量= k × k × c 1 × c 2 k \times k \times c_1 \times c_2 k×k×c1×c2
(b)深度可分离卷积参数量= k × k × c 1 + 1 × 1 × c 1 × c 2 k \times k \times c1 + 1\times1\times c_1\times c_2 k×k×c1+1×1×c1×c2
上面的例子我们可以清楚地看到,得到相同的output.shape,直观看上去,深度可分离卷积的参数量比常规卷积少了一个数量级。
- 分析
深度可分离卷积同时考虑图像的区域和通道(深度可分离卷积首先只考虑区域depth_wise,然后再只考虑通道point_wise)实现了图像的区域和通道的完全分离。
- 代码实现(pytorch)
import torch
import torch.nn as nn
...
model = nn.Sequential(
nn.Conv2d(in_channels = in_channel, out_channels = in_channel,
kernel_size = kernel_size, stride = stride, padding = 1, dilation = dilation, group = in_channel),
nn.Conv2d(in_channels = in_channel, out_channels = out_channel kernel_size = 1, padding = 0)
)
之所以在写在前面中提到,本文的题目一定要先是分组卷积再是深度可分离卷积,因为在我看来后者是前者的极端情况(分组卷积的group设为in_channel,即每组的channel数量为1),尽管形式上两者有比较大的差别:分组卷积只进行一次卷积操作即可,而深度可分离卷积需要进行两次——先depth_wise再point_wise卷积,但他们本质上是一样的。
深度可分离卷积进行一次卷积是无法达到输出指定维度的tensor的,这是由它将group设为in_channel决定的,输出的tensor通道数只能是in_channel,不能达到要求,所以又用了11的卷积改变最终输出的通道数。这样的想法也是自然而然的,BottleNeck不就是先11卷积减少参数量再33卷积feature map,最后再11恢复原来的通道数,所以BottleNeck的目的就是减少参数量。提到BottleNeck结构就是想说明1*1卷积经常用来改变通道数。
这样,分组卷积和深度可分离卷积就能很好地联系起来并牢牢掌握啦!!!