强化学习笔记(七)演员-评论家算法(Actor-Critic Algorithms)及Pytorch实现
强化学习笔记(七)演员-评论家算法(Actor-Critic Algorithms)及Pytorch实现
- Q1: Actor-Critic的含义,与纯策略梯度法的不同?
- Q2: 基线(Baseline)和优势函数(Advantage Function)的理解
- 基于Pytorch的Actor-Critic实现
-
-
- 程序流程
-
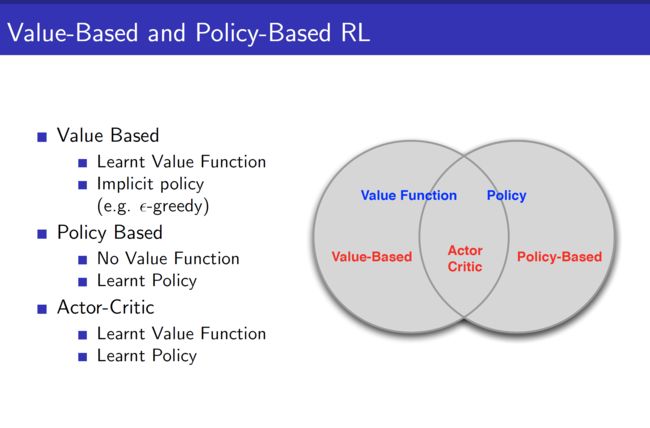
接着上一节的学习笔记。上一节学习总结了Policy Gradient方法以及蒙特卡洛Reinforce实现。这节了解一下Actor-Critic算法。Actor-Critic是2000年在NIPS上发表的一篇名为 Actor-Critic Algorithms的论文中提出的。它是一种策略(Policy Based)和价值(Value Based)相结合的方法,见UCL第七讲的开篇PPT(下图)
Q1: Actor-Critic的含义,与纯策略梯度法的不同?
第一个是Actor角色,在一些资料中也称为“演员角色”。这个角色是一个相对独立的模型,你仍然可以把它理解成一个神经网络,任务就是学动作。优化它的过程和优化一个普通DQN里面的网络没有太大的区别。
另一个是Critic角色,或者称作“评论家角色”。它负责评估Actor的表现,并指导Actor下一阶段的动作。这个角色也是一个独立的模型。在这种思维的指导下,估值学习也是一个独立的、可优化的任务,需要通过一个模型进行拟合。动作输出也是一个模型,通过一个模型进行拟合。
这种思想有点类似GAN网络中的生成器和判别器,两者相互监督和牵制,最后达到较好的效果。如果之前的DQN,Policy Gradient梯度上升公式及蒙特卡洛Reinforce算法都看懂了的话,这里还是很好理解的。
与Monte Carlo Policy Gradient不同,Actor Critic放弃利用回报来评估真实价值函数,而直接使用Critic算法,利用函数逼近法(Function Approximation Methods)即神经网络,利用逼近策略梯度法而非真实策略梯度。
Q2: 基线(Baseline)和优势函数(Advantage Function)的理解
策略梯度的更新公式如下:
∇ θ J ( θ ) = E π θ [ ∇ θ log π θ ( s , a ) Q w ( s , a ) ] \nabla_{\theta} J(\theta)=\mathbb{E}_{\pi_{\theta}}\left[\nabla_{\theta} \log \pi_{\theta}(s, a) Q_{w}(s, a)\right] ∇θJ(θ)=Eπθ[∇θlogπθ(s,a)Qw(s,a)]
上一节已经讲过, ∇ θ log π θ ( s , a ) \nabla_{\theta} \log \pi_{\theta}(s, a) ∇θlogπθ(s,a)是分值函数(Score Function),它是固定不动的,因为我们要更新的变量就是策略 π θ ( s , a ) \pi_{\theta}(s,a) πθ(s,a). 对 Q w ( s , a ) Q_{w}(s,a) Qw(s,a),能不能做做文章呢?通过理论推导,可以发现引入一个Baseline函数 B ( s ) B(s) B(s),只要它不随动作a变化,上述等式依然成立,这是因为减的那一项是0.
E π θ [ ∇ θ log π θ ( s , a ) B ( s ) ] = ∑ s ∈ S d π θ ( s ) ∑ a ∇ θ π θ ( s , a ) B ( s ) = ∑ s ∈ S d π θ B ( s ) ∇ θ ∑ a ∈ A π θ ( s , a ) = ∑ s ∈ S d π θ B ( s ) ∇ 1 = 0 \begin{aligned} \mathbb{E}_{\pi_{\theta}}\left[\nabla_{\theta} \log \pi_{\theta}(s, a) B(s)\right] &=\sum_{s \in \mathcal{S}} d^{\pi_{\theta}}(s) \sum_{a} \nabla_{\theta} \pi_{\theta}(s, a) B(s) \\ &=\sum_{s \in \mathcal{S}} d^{\pi_{\theta}} B(s) \nabla_{\theta} \sum_{a \in \mathcal{A}} \pi_{\theta}(s, a) \\ &=\sum_{s \in \mathcal{S}} d^{\pi_{\theta}} B(s) \nabla 1\\ &=0 \end{aligned} Eπθ[∇θlogπθ(s,a)B(s)]=s∈S∑dπθ(s)a∑∇θπθ(s,a)B(s)=s∈S∑dπθB(s)∇θa∈A∑πθ(s,a)=s∈S∑dπθB(s)∇1=0
令 B ( s ) = V π θ ( s ) B(s)=V^{\pi} \theta(s) B(s)=Vπθ(s),引入优势函数(Advantage Function)—— A π θ ( s , a ) A^{\pi_{\theta}}(s, a) Aπθ(s,a).
A π θ ( s , a ) = Q π θ ( s , a ) − V π θ ( s ) ∇ θ J ( θ ) = E π θ [ ∇ θ log π θ ( s , a ) A π θ ( s , a ) ] \begin{aligned} A^{\pi_{\theta}}(s, a) &=Q^{\pi_{\theta}}(s, a)-V^{\pi_{\theta}}(s) \\ \nabla_{\theta} J(\theta) &=\mathbb{E}_{\pi_{\theta}}\left[\nabla_{\theta} \log \pi_{\theta}(s, a) A^{\pi_{\theta}}(s, a)\right] \end{aligned} Aπθ(s,a)∇θJ(θ)=Qπθ(s,a)−Vπθ(s)=Eπθ[∇θlogπθ(s,a)Aπθ(s,a)]
两者的期望一样,优势函数有什么意义?从上节Monte Carlo 策略梯度法可以看到,更新项是蒙特卡洛采样的target return,这样导致的方差会很大。而使用优势函数可以显著地减少策略梯度的方差。
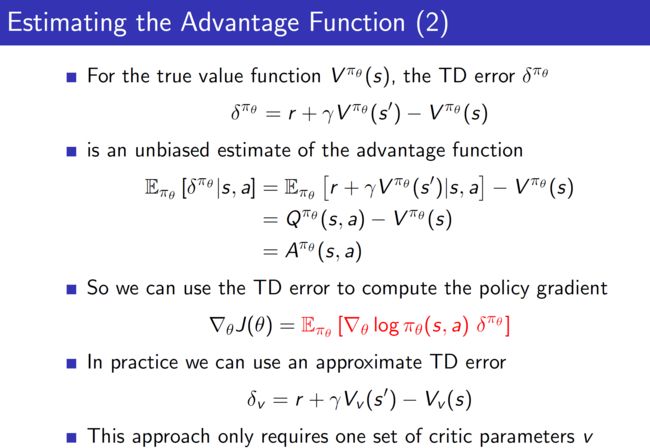
Critic(评论家)的任务就是要评估优势函数,而TD error的期望刚好就是优势函数:
基于Pytorch的Actor-Critic实现
参考Tensorflow版本:https://github.com/ljpzzz/machinelearning/blob/master/reinforcement-learning/actor_critic.py
代码改了很久,在一些很简单的地方被卡住了。主要注意的是td_error是Critic的Q网络算出来的值,直接返回是带第一个网络梯度的,这时候需要去掉这个梯度,不然在Actor更新的时候就会报错。
另外,这个代码很难收敛,我一直持续在9分上不去了。不过写一遍确实有助于对策略-价值双网络的理解。
程序流程
- 实例化actor / critic 并初始化超参数
- for Epochs:
for Steps:
① 用actor选动作
② Step(state, action) 状态转移
③ 用critic的Q_Net算V(s)和V(s’)
得TD_error = r + γV(s’)-V(s)
顺便用TD_error的均方误差训练Q_Network
④ TD_error反馈给Actor,Policy Gradient公式 训练Actor
⑤ state = next_state
"""
@ Author: Peter Xiao
@ Date: 2020/7/23
@ Filename: Actor_critic.py
@ Brief: 使用 Actor-Critic算法训练CartPole-v0
"""
import gym
import torch
import torch.nn as nn
import torch.nn.functional as F
import numpy as np
import time
# Hyper Parameters for Actor
GAMMA = 0.95 # discount factor
LR = 0.01 # learning rate
# Use GPU
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
torch.backends.cudnn.enabled = False # 非确定性算法
class PGNetwork(nn.Module):
def __init__(self, state_dim, action_dim):
super(PGNetwork, self).__init__()
self.fc1 = nn.Linear(state_dim, 20)
self.fc2 = nn.Linear(20, action_dim)
def forward(self, x):
out = F.relu(self.fc1(x))
out = self.fc2(out)
return out
def initialize_weights(self):
for m in self.modules():
nn.init.normal_(m.weight.data, 0, 0.1)
nn.init.constant_(m.bias.data, 0.01)
class Actor(object):
# dqn Agent
def __init__(self, env): # 初始化
# 状态空间和动作空间的维度
self.state_dim = env.observation_space.shape[0]
self.action_dim = env.action_space.n
# init network parameters
self.network = PGNetwork(state_dim=self.state_dim, action_dim=self.action_dim).to(device)
self.optimizer = torch.optim.Adam(self.network.parameters(), lr=LR)
# init some parameters
self.time_step = 0
def choose_action(self, observation):
observation = torch.FloatTensor(observation).to(device)
network_output = self.network.forward(observation)
with torch.no_grad():
prob_weights = F.softmax(network_output, dim=0).cuda().data.cpu().numpy()
# prob_weights = F.softmax(network_output, dim=0).detach().numpy()
action = np.random.choice(range(prob_weights.shape[0]),
p=prob_weights) # select action w.r.t the actions prob
return action
def learn(self, state, action, td_error):
self.time_step += 1
# Step 1: 前向传播
softmax_input = self.network.forward(torch.FloatTensor(state).to(device)).unsqueeze(0)
action = torch.LongTensor([action]).to(device)
neg_log_prob = F.cross_entropy(input=softmax_input, target=action, reduction='none')
# Step 2: 反向传播
# 这里需要最大化当前策略的价值,因此需要最大化neg_log_prob * tf_error,即最小化-neg_log_prob * td_error
loss_a = -neg_log_prob * td_error
self.optimizer.zero_grad()
loss_a.backward()
self.optimizer.step()
# Hyper Parameters for Critic
EPSILON = 0.01 # final value of epsilon
REPLAY_SIZE = 10000 # experience replay buffer size
BATCH_SIZE = 32 # size of minibatch
REPLACE_TARGET_FREQ = 10 # frequency to update target Q network
class QNetwork(nn.Module):
def __init__(self, state_dim, action_dim):
super(QNetwork, self).__init__()
self.fc1 = nn.Linear(state_dim, 20)
self.fc2 = nn.Linear(20, 1) # 这个地方和之前略有区别,输出不是动作维度,而是一维
def forward(self, x):
out = F.relu(self.fc1(x))
out = self.fc2(out)
return out
def initialize_weights(self):
for m in self.modules():
nn.init.normal_(m.weight.data, 0, 0.1)
nn.init.constant_(m.bias.data, 0.01)
class Critic(object):
def __init__(self, env):
# 状态空间和动作空间的维度
self.state_dim = env.observation_space.shape[0]
self.action_dim = env.action_space.n
# init network parameters
self.network = QNetwork(state_dim=self.state_dim, action_dim=self.action_dim).to(device)
self.optimizer = torch.optim.Adam(self.network.parameters(), lr=LR)
self.loss_func = nn.MSELoss()
# init some parameters
self.time_step = 0
self.epsilon = EPSILON # epsilon值是随机不断变小的
def train_Q_network(self, state, reward, next_state):
s, s_ = torch.FloatTensor(state).to(device), torch.FloatTensor(next_state).to(device)
# 前向传播
v = self.network.forward(s) # v(s)
v_ = self.network.forward(s_) # v(s')
# 反向传播
loss_q = self.loss_func(reward + GAMMA * v_, v)
self.optimizer.zero_grad()
loss_q.backward()
self.optimizer.step()
with torch.no_grad():
td_error = reward + GAMMA * v_ - v
return td_error
# Hyper Parameters
ENV_NAME = 'CartPole-v0'
EPISODE = 3000 # Episode limitation
STEP = 3000 # Step limitation in an episode
TEST = 10 # The number of experiment test every 100 episode
def main():
# initialize OpenAI Gym env and dqn agent
env = gym.make(ENV_NAME)
actor = Actor(env)
critic = Critic(env)
for episode in range(EPISODE):
# initialize task
state = env.reset()
# Train
for step in range(STEP):
action = actor.choose_action(state) # SoftMax概率选择action
next_state, reward, done, _ = env.step(action)
td_error = critic.train_Q_network(state, reward, next_state) # gradient = grad[r + gamma * V(s_) - V(s)]
actor.learn(state, action, td_error) # true_gradient = grad[logPi(s,a) * td_error]
state = next_state
if done:
break
# Test every 100 episodes
if episode % 100 == 0:
total_reward = 0
for i in range(TEST):
state = env.reset()
for j in range(STEP):
env.render()
action = actor.choose_action(state) # direct action for test
state, reward, done, _ = env.step(action)
total_reward += reward
if done:
break
ave_reward = total_reward/TEST
print('episode: ', episode, 'Evaluation Average Reward:', ave_reward)
if __name__ == '__main__':
time_start = time.time()
main()
time_end = time.time()
print('Total time is ', time_end - time_start, 's')