模型预测控制(MPC)(九):弹簧质量阻尼的MPC仿真
之前的博客都是讲的理论,现在以一个实际控制例子进行仿真分析。弹簧质量阻尼系统是最典型的二阶系统,本文就用MPC算法来控制弹簧质量阻尼系统。首先建立弹簧质量阻尼系统的模型,然后将连续时间模型转换成离散模型,推倒预测和优化方程,将控制问题转化成标准二次型问题,分别使用解析法和数值法两种优化求解方式,最后用Matlab进行了单位阶跃响应MPC控制仿真。文末给出了仿真源码的地址。
一、弹簧质量阻尼系统
1.1 数学模型
弹簧质量阻尼系统如下图所示:
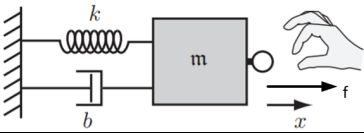
图1 弹簧质量阻尼系统
1.1.1 连续状态方程
系统动力学方程为:
![]()
取状态向量为:![]() ,控制量为:
,控制量为:![]() ,系统输出量为:
,系统输出量为: ,则动力学方程可以写为:
,则动力学方程可以写为:
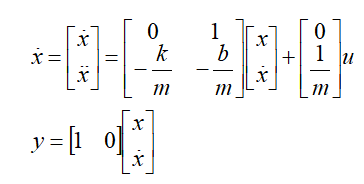
其中,令

则连续状态方程可以写成如下形式:

1.1.2 离散状态方程
将连续状态方程转换成离散方程,最简单的就是通过matlab函数c2dm。例如在上述模型中,假设![]() ,离散采样时间为
,离散采样时间为![]() ,则连续状态方程的矩阵分别为:
,则连续状态方程的矩阵分别为:

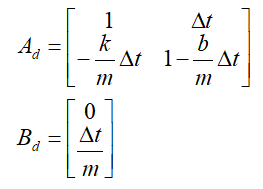
通过c2dm函数得到的离散模型如下:

也可以手动推导出离散方程。采用前向法,以上状态方程可以写成:
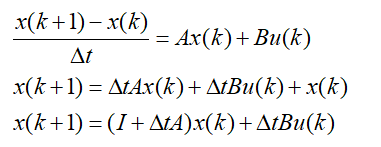
则离散状态方程矩阵为:
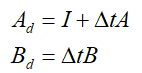
在弹簧质量阻尼系统中,则是:
将参数代进去计算,与c2dm函数结果基本相同,只有一些微小的数值误差。
二、预测控制
MPC的基本思路就是将控制问题转化成标准二次型优化问题:
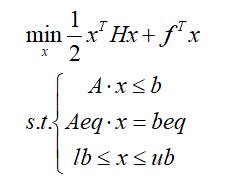
(这种表示方式来自matlab quadprog函数的help文件)
理解了这个思想,接下来就剩两个问题:
1、怎么将控制问题表示成二次型问题?
2、怎么求解二次型问题?
关于第2点很容易解决,数值解法和解析解法都有,而且很多开源函数库,专门求解二次型问题。这个专栏里第一到七篇都是讲的如何通过解析解的方式构造并求解MPC控制的优化问题,从第八篇开始,逐渐转到数值解的求法。解析求法推导过程复杂,而且对于有些约束条件情况下无法求解,但是运算量不大,适合部署在小型实时内核中。数值解法优势更明显,可以增加更多约束条件,进行更多状态变量的控制,推导过程也更加清晰,许多开源函数库可以求解二次型优化问题,但是要求硬件平台有一定的计算能力。
2.1 数值法
2.1.1 转化成优化问题
基于k时刻状态变量对未来![]() 个周期内的状态进行预测,结果表示为:
个周期内的状态进行预测,结果表示为:
![]()
 个未来的控制变量序列表示为:
个未来的控制变量序列表示为:
![]()
这个序列也是需要通过优化求解得到的控制序列。将上述两个序列代入离散模型中得到:
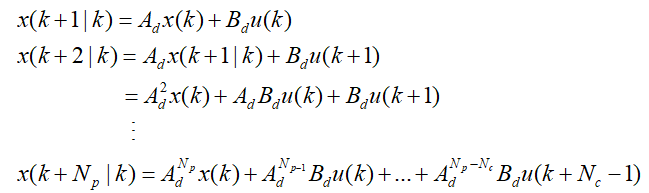
写成矩阵形式:
![]()
其中

预测未来![]() 个周期内的状态需要知道
个周期内的状态需要知道![]() 个周期的参考输入,参考输入序列为:
个周期的参考输入,参考输入序列为:
![]()
定义代价函数为:
![]()
代价函数的第一项反映了输入信号与预测的输出信号之间的误差,第二项则是为了限制控制量U,避免控制量太大。其中Q和W都是对角矩阵![]() ,
,![]() ,Q控制误差的权值,W是控制量的权值。
,Q控制误差的权值,W是控制量的权值。
将代价函数化简,并去掉对优化没影响的常数项得到:
![]()
其中![]() ,对比一下标准二次型的表达式,可以看出:
,对比一下标准二次型的表达式,可以看出:

至此,就可以调用二次规划求解函数quadprog进行优化求解。
2.1.2 matlab仿真
控制周期0.01s,仿真时间5s,系统模型参数跟上一节相同![]() ,为了简单起见,避免考虑各种矩阵的维度,假设控制时域和预测时域相等
,为了简单起见,避免考虑各种矩阵的维度,假设控制时域和预测时域相等![]() ,控制量权值
,控制量权值![]() ,误差量权值
,误差量权值![]() ,仿真得到的输出量和控制量如下图所示。
,仿真得到的输出量和控制量如下图所示。

图2 数值法MPC阶跃响应输出
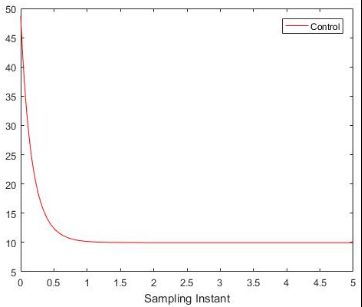
图3 解析法MPC控制量
仿真控制的主循环用时25.26s。
2.2 解析法
具体推导过程参考专栏的一到七篇,这里只给出结论性公式。
2.2.1 增广模型
首先将离散模型变换到增广模型:
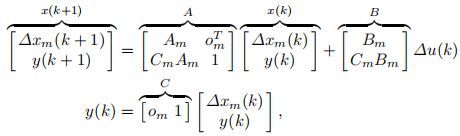
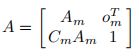
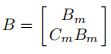
![]()
![]() 分别对应离散模型中的
分别对应离散模型中的![]() 。这里的
。这里的 就表示增广模型的矩阵。这一步可以用matlab实现,源代码在第一篇博客中。
就表示增广模型的矩阵。这一步可以用matlab实现,源代码在第一篇博客中。
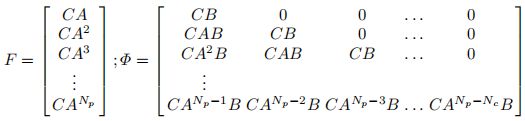
2.2.2 计算
2.2.3 代价函数
定义代价函数为:
![]()
代价函数的第一项反映了输入信号与预测的输出信号之间的误差,第二项则是为了限制控制量△U,避免控制量太大。其中![]() 是对角矩阵
是对角矩阵![]() ,是控制输出的权值。如果
,是控制输出的权值。如果![]() ,则说明不用考虑控制变量△U有多大,只考虑控制误差越小越好。如果
,则说明不用考虑控制变量△U有多大,只考虑控制误差越小越好。如果![]() 取值比较大,则表示需要仔细考虑△U的大小。
取值比较大,则表示需要仔细考虑△U的大小。
2.2.4 优化求解
要求上述代价函数的最小值,最简单粗暴的方法就是求一阶导:

当J的一阶导为零时,可以求得控制变量的最优解:
![]()
这就是最优的控制量(增量式的)序列,将其改写成:
![]()
这就是最优的控制量,其中包含了个控制序列,只使用这一序列中的第一个变量对系统进行控制,忽略这一序列中的其余变量。当下一可采样周期到来时,使用新观测的状态变量,重复以上优化过程,计算出新的控制变量序列,从而使优化窗口不断向前推进,每一采样时刻都进行实时预测与优化。一个优化控制过程的源代码在第二篇博客中。
2.2.5 matlab仿真
控制周期0.01s,仿真时间5s,系统模型参数跟上一节相同![]() ,控制时域
,控制时域![]() ,预测时域
,预测时域![]() ,控制量权值
,控制量权值![]() ,仿真得到的输出量和控制量如下图所示。
,仿真得到的输出量和控制量如下图所示。
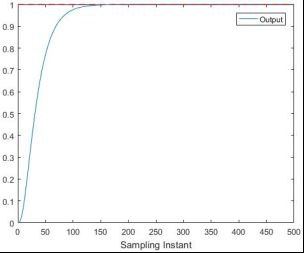
图4 解析法MPC阶跃响应输出

图5 解析法MPC控制量
仿真控制的主循环用时0.006s。
三、总结
- 上述数值解法优化求解得到的控制量直接用于系统控制,相当于是绝对式控制;而上述解析法求解得到的控制量是控制量的增量,相当于是增量式控制。
- 两种解法仿真结果相似,都能达到控制要求,但是所需的控制参数不一样,这主要跟绝对式和相对式控制方式的差异有关。
- 在仿真时长相同的情况下,解析式解法比数值式解法快很多,这也是符合实际的。
四、参考文献
[1] Liuping Wang. Model Predictive Control System Design and Implementation Using MATLAB.
源代码包里面包括两种仿真方法的m文件:
![]()
- 数值法仿真源码;
- 解析法仿真源码;
源码连接如下:
弹簧质量阻尼系统的MPC控制算法仿真m文件源码-机器学习文档类资源-CSDN下载用MPC算法来控制弹簧质量阻尼系统。首先建立弹簧质量阻尼系统的模型,然后将连续时间模型转换成离散模型更多下载资源、学习资料请访问CSDN下载频道.https://download.csdn.net/download/u014170067/85038612