deepstream-yolov5-6.0 存在精度误差修改
问题:经过工程create engine的会导致精度丢失。
1、 通过使用 https://github.com/shouxieai和python同时跑同一个pt,验证同样的pt
2、仿照github的开源处理how to convert the outputs of the yolov5.onnx to boxes ,labels and scores . · Issue #708 · ultralytics/yolov5 · GitHub
github上的开源工程,是巨人,我是站在他的肩膀上。
此工程是使用了,文件layer的内容修改了层结构。所以在create engine的时候会要求使用他们的方式创建,,但是和yolov5-6.0的函数有变化,没有做修改。
于是开启了自己的苦逼之路。
第一步解析:
1.首先咱们都知道,模型的输出是分节点的。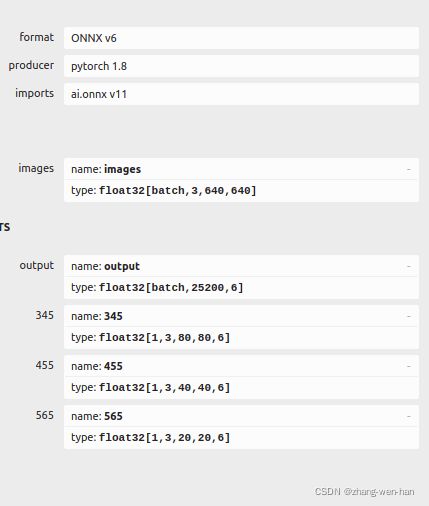
如上图:
在巨人的工程里面是分别计算345.455.565层的数据,进行的合并。且经过他们的wts+config的方式创建的engine的输出是18*80*80 18*40*40 18*2020。
可以把 layer.inferDims.d[0]打印出来验证。。上面的masks.size是计算节点,此处循环3次。
里面的decodeYoloTensor 解析函数:

后面的 addBBoxProposal ->convertBBox主要实现的是:框的坐标
 NMS 函数:nmsAllClasses
NMS 函数:nmsAllClasses


经过这些步骤后,就把框等数据处理好,丢给std::vector
返回给deepstream渲染了。
第二步思路:
1、官方的代码生成onnx,经过trtexec转engine ,直接拿engine过来使用。
存在的问题:输出节点的维度不一致,这个巨人的工程是三个维度,我是四个维度。且需要对应相应的anchor存在问题。
2、使用1x25200x85的节点数据,进行数据处理
第三部上代码:

dimensions =5+类别数 比如说80个类就是85 页就是1x25200x85的85
confidenceIndex =4 置信度的位置 0.1.2.3 分别是x,y,w,h 。4为目标框的概率
循环25200次,
int index = i * dimensions;
if(output[index+confidenceIndex] <= 0.4f) continue;
每次都取index =次数*类别数+置信度的位置。目标框小于0.4丢弃掉。
output[index+j] = output[index+j] * output[index+confidenceIndex];
将大于0.4的类别概率分别与目标框概率相乘。
for (int k = labelStartIndex; k < dimensions; ++k) {
if(output[index+k] <= 0.5f) continue;
const float bx = output[index];
const float by = output[index+1];
const float bw = output[index+2];
const float bh = output[index+3];
const float maxProb = output[index+k];
const int maxIndex = k -5; // k是5+0的位置,所以类别是k-5
addBBoxProposal(bx, by, bw, bh, networkInfo.width, networkInfo.height, maxIndex, maxProb, binfo);此处不再需要output[index+4]是因为,已经用4过滤了,且与index+4相乘覆盖了
k的起始位置labelStartIndex是5。所以类别数,需要用k-5
后面接丢还给巨人的模型,转换坐标和NMS。(addBBoxProposal)
至此,结束
附上整个 代码块:
/*
* Copyright (c) 2019, NVIDIA CORPORATION. All rights reserved.
*
* Permission is hereby granted, free of charge, to any person obtaining a
* copy of this software and associated documentation files (the "Software"),
* to deal in the Software without restriction, including without limitation
* the rights to use, copy, modify, merge, publish, distribute, sublicense,
* and/or sell copies of the Software, and to permit persons to whom the
* Software is furnished to do so, subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in
* all copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
* FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL
* THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
* LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING
* FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER
* DEALINGS IN THE SOFTWARE.
*
* Edited by Marcos Luciano
* https://www.github.com/marcoslucianops
*/
#include
#include
#include
#include "nvdsinfer_custom_impl.h"
#include "utils.h"
#include "yoloPlugins.h"
extern "C" bool NvDsInferParseYolo(
std::vector const& outputLayersInfo,
NvDsInferNetworkInfo const& networkInfo,
NvDsInferParseDetectionParams const& detectionParams,
std::vector& objectList);
static std::vector
nonMaximumSuppression(const float nmsThresh, std::vector binfo)
{
auto overlap1D = [](float x1min, float x1max, float x2min, float x2max) -> float {
if (x1min > x2min)
{
std::swap(x1min, x2min);
std::swap(x1max, x2max);
}
return x1max < x2min ? 0 : std::min(x1max, x2max) - x2min;
};
auto computeIoU
= [&overlap1D](NvDsInferParseObjectInfo& bbox1, NvDsInferParseObjectInfo& bbox2) -> float {
float overlapX
= overlap1D(bbox1.left, bbox1.left + bbox1.width, bbox2.left, bbox2.left + bbox2.width);
float overlapY
= overlap1D(bbox1.top, bbox1.top + bbox1.height, bbox2.top, bbox2.top + bbox2.height);
float area1 = (bbox1.width) * (bbox1.height);
float area2 = (bbox2.width) * (bbox2.height);
float overlap2D = overlapX * overlapY;
float u = area1 + area2 - overlap2D;
return u == 0 ? 0 : overlap2D / u;
};
std::stable_sort(binfo.begin(), binfo.end(),
[](const NvDsInferParseObjectInfo& b1, const NvDsInferParseObjectInfo& b2) {
return b1.detectionConfidence > b2.detectionConfidence;
});
std::vector out;
for (auto i : binfo)
{
bool keep = true;
for (auto j : out)
{
if (keep)
{
float overlap = computeIoU(i, j);
keep = overlap <= nmsThresh;
}
else
break;
}
if (keep) out.push_back(i);
}
return out;
}
static NvDsInferParseObjectInfo convertBBox(
const float& bx, const float& by, const float& bw,
const float& bh, const uint& netW, const uint& netH)
{
NvDsInferParseObjectInfo b;
float x1 = bx - bw / 2;
float y1 = by - bh / 2;
float x2 = x1 + bw;
float y2 = y1 + bh;
x1 = clamp(x1, 0, netW);
y1 = clamp(y1, 0, netH);
x2 = clamp(x2, 0, netW);
y2 = clamp(y2, 0, netH);
b.left = x1;
b.width = clamp(x2 - x1, 0, netW);
b.top = y1;
b.height = clamp(y2 - y1, 0, netH);
return b;
}
static void addBBoxProposal(
const float bx, const float by, const float bw, const float bh,
const uint& netW, const uint& netH, const int maxIndex,
const float maxProb, std::vector& binfo)
{
NvDsInferParseObjectInfo bbi = convertBBox(bx, by, bw, bh, netW, netH);
if (bbi.width < 1 || bbi.height < 1) return;
bbi.detectionConfidence = maxProb;
bbi.classId = maxIndex;
binfo.push_back(bbi);
}
static std::vector
nmsAllClasses(const float nmsThresh,
std::vector& binfo,
const uint numClasses)
{
std::vector result;
std::vector> splitBoxes(numClasses);
for (auto& box : binfo)
{
splitBoxes.at(box.classId).push_back(box);
}
for (auto& boxes : splitBoxes)
{
boxes = nonMaximumSuppression(nmsThresh, boxes);
result.insert(result.end(), boxes.begin(), boxes.end());
}
return result;
}
extern "C" bool NvDsInferParseYolo(
std::vector const& outputLayersInfo,
NvDsInferNetworkInfo const& networkInfo,
NvDsInferParseDetectionParams const& detectionParams,
std::vector& objectList)
{
uint numBBoxes = kNUM_BBOXES;
uint numClasses = kNUM_CLASSES;
int dimensions = 5 + detectionParams.numClassesConfigured;
int confidenceIndex = 4;
int labelStartIndex = 5;
const float beta_nms = 0.45;
std::vector binfo;
for (unsigned int l = 0; l < 1; l++)
{
float* output = (float *)outputLayersInfo[l].buffer;
const NvDsInferLayerInfo &layer = outputLayersInfo[0];
//printf("zwh layer.inferDims.d[0] %d, layer.inferDims.d[1] %d \n", layer.inferDims.d[0],layer.inferDims.d[1]);
for (int i = 0; i < 25200; ++i) {
int index = i * dimensions; // index是5+classnum的倍数,位置是0;
if(output[index+confidenceIndex] <= 0.4f) continue;
for (int j = labelStartIndex; j < dimensions; ++j) {
output[index+j] = output[index+j] * output[index+confidenceIndex];
}
for (int k = labelStartIndex; k < dimensions; ++k) {
if(output[index+k] <= 0.5f) continue;
const float bx = output[index];
const float by = output[index+1];
const float bw = output[index+2];
const float bh = output[index+3];
const float maxProb = output[index+k];
const int maxIndex = k -5; // k是5+0的位置,所以类别是k-5
printf("output[index+4]:%f, output[index+5]%d \n",output[index+4], output[index+5]);
printf("zwh bx:%f by:%f bw:%f bh:%f maxProb:%f \n", bx, by, bw, bh, maxProb);
addBBoxProposal(bx, by, bw, bh, networkInfo.width, networkInfo.height, maxIndex, maxProb, binfo);
}
}
}
objectList.clear();
objectList = nmsAllClasses(beta_nms, binfo, detectionParams.numClassesConfigured);
return true;
}
CHECK_CUSTOM_PARSE_FUNC_PROTOTYPE(NvDsInferParseYolo);