强化学习(一)--Sarsa与Q-learning算法
强化学习(一)--Sarsa与Q-learning算法
- 1. SARSA算法
- 2. Q-learning算法
- 3. 代码实现
-
- 3.1主函数
- 3.2训练及测试函数
- 3.3 SarsaAgent类的实现
-
- 3.3.1 sample函数
- 3.3.2 predict函数
- 3.3.3 learn函数
- 3.4 Q-learning算法的改变
最近实验室有一个项目要用到强化学习,在这开个新坑来记录下强化学习的学习过程。
第一节就先来最简单的基于表格型的RL算法,包括经典的Sarsa和Q-learning算法。
由于时间原因,关于算法的理论知识不再详细介绍,重点是研究怎么编程实现,代码是参考的飞浆PaddlePaddle公开课的代码,下来又自己手撸了一遍。飞浆PaddlePaddle公开课是我认为最适合入门强化学习的公开课,科老师讲解的真的非常清晰,公开课地址。
1. SARSA算法
sarsa算法是最基础的on-policy算法,它采用的是TD单步更新的方式,每一个step都会更新Q表格,Q表格的更新公式为:这也是代码最核心的部分,它就是将Q值不断逼近目标值,也就是未来总收益。

Sarsa的名字就来源于它更新Q表格时所用到的五个参数:S,A,R,S’,A’,它的算法伪代码为:

第一次看伪代码可能会有些懵,公开课里很贴心的给出了流程图:
--Sarsa与Q-learning算法_第3张图片](http://img.e-com-net.com/image/info8/e6102bf659a9480f88ed031abfe96b29.jpg)
根据流程图很容易就能编程实现Sarsa算法。
2. Q-learning算法
Q-learning算法则是off-policy算法,与sarsa算法一样都是采用查表的方式,不同的地方在于它的A’默认为最优策略选择的动作,而sarsa的A则是下一个状态要实际执行的动作。
因此,Q-learning算法的Q表更新公式有些不同,可以看到Target_Q使用的是下个状态下最大的Q值来更新Q表格:
![]()
Q-learning算法的伪代码,可以看到下一时刻的动作并不一定去执行:

它的流程图,与sarsa的对比就能看出不同:

3. 代码实现
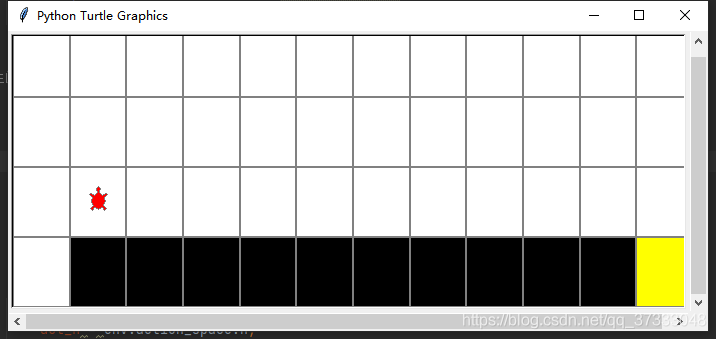
以sarsa算法为例,来讲解一下怎么进行代码实现,这里使用的环境为gym中的CliffWalking,它有四个动作 :0 up, 1 right, 2 down, 3 left。小乌龟每走一步reward = -1,掉入黑色方框内reward=-100,小乌龟被拖到起点重新开始。
3.1主函数
主函数主要承担导入环境,定义智能体,训练及测试。
- 导入的环境是gym中现有的环境,可以直接使用,具体的使用方法可以看看gym库的使用方法。
- 定义的智能体是SarsaAgent,使我们定义的一个类,由五个参数需要设定。
- 训练函数run_episode() 和测试函数test_episode() 也是接下来要实现的。
- 共进行500个episode的训练,每个episode都输出进行多少步和总的reward,每20个episode,我们输出可视化一下。
- 训练结束后我们测试下结果。
# 主函数
def main():
# 导入环境
env = gym.make("CliffWalking-v0")
env = CliffWalkingWapper(env)
# env = gym.make("FrozenLake-v0",is_slippery = False)
# env = FrozenLakeWapper(env)
agent = SarsaAgent(
obs_n = env.observation_space.n,
act_n = env.action_space.n,
learning_rate = 0.1,
gamma = 0.9,
e_greed = 0.1)
is_render = False
# 进行500个轮次的训练
for episode in range(1000):
ep_reward,ep_steps = run_episode(env,agent,is_render) # 一个episode
print("Episode %s: steps = %s ,reward = %1.f" %(episode,ep_steps,ep_reward))
# 每20个episode渲染一下看看效果
if episode % 20 == 0:
is_render = True
else:
is_render = False
# 训练结束,测试效果
test_episode(env,agent)
3.2训练及测试函数
训练函数的思路很简单,就按照上边的流程图实现就ok了。
- 获得初始状态s是通过 env.reset() 函数,而与环境进行交互获得s’和reward是通过 env.step() 函数,这两个函数都是gym库中内置的函数。
- 选择动作使用的是e_greedy方法,由SarsaAgent 类中的sample() 函数完成。
- Q表的更新则有SarsaAgent 类中的learn() 函数完成。
- 要完成S<–S’ 和A<–A’ 的工作。
def run_episode(env,agent,is_render=False):
total_steps = 0 # 记录每个episode走了多少step
total_reward = 0 # 记录每个episode获得的总reward
obs = env.reset() # 获得s
action = agent.sample(obs) # 选择一个动作a
while True:
next_obs,reward,done,_ = env.step(action) # 与环境交互获得s',r
next_action = agent.sample(next_obs) # 获得a'
# 更新Q表格
agent.learn(obs,action,reward,next_obs,next_action,done)
# s<-s' a<-a'
obs = next_obs
action = next_action
total_steps+=1
total_reward+=reward
if is_render: # 是否渲染图像
env.render()
if done: # 是否结束episode训练
break
return total_reward,total_steps
测试函数的思路和训练函数是一样的,只不过不再需要更新Q表格,而动作的选取完全是基于Q表格,实现函数为SarsaAgent 类中的predict() 函数。
# 测试函数
def test_episode(env,agent):
total_reward = 0
obs = env.reset()
while True:
action = agent.predict(obs)
next_obs,reward,done,_ = env.step(action)
total_reward += reward
obs = next_obs
time.sleep(0.5)
env.render()
if done:
print('test reward = %.1f'%(total_reward))
break
3.3 SarsaAgent类的实现
SarsaAgent类有三个主要函数组成:sample()、predict()、learn()。
3.3.1 sample函数
sample函数主要实现e_greedy方法来选择动作,满足强化学习中的探索和利用。
- 我们设置参数epsilon为探索率,若 小于1-epsilon,则使用查Q表的方式选择动作;若大于1-epsilon,则随机选择动作。
# 根据状态,选择动作 采用e-greedy算法
def sample(self,obs):
if np.random.uniform(0,1)<(1.0 - self.epsilon): # 根据Q表格选择动作
action = self.predict(obs)
else:
action = np.random.choice(self.act_n) # 随机选择动作,探索
return action
3.3.2 predict函数
predict函数则是实现查Q表,选择该状态下Q值最大的动作。
- Q值最大的动作有可能有多个,随机选择这些动作的一个。
# 查表格选择动作
def predict(self,obs):
Q_list = self.Q[obs,:] # 取这一状态下所有a的Q值
max_q = np.max(Q_list) # 选择Q值最大的
action_list = np.where(Q_list==max_q)[0] # max_q有可能对应多个动作,取出所有的动作
action = np.random.choice(action_list) # 随机选择这些动作
return action
3.3.3 learn函数
learn函数则是利用S,A,R,S’,A’的值完成Q表的更新。
- 若到达最终状态,Q_Target的值为R的值。
# 更新Q表格的方法
def learn(self,obs,action,reward,next_obs,next_action,done):
predict_Q = self.Q[obs,action]
if done:
target_Q = reward
else:
target_Q = reward + self.gamma * self.Q[next_obs,next_action]
self.Q[obs,action] += self.lr * (target_Q - predict_Q) # 修正Q值
3.4 Q-learning算法的改变
Q-learning算法的实现也比较类似,其中只需要改变learn函数和run_episode函数中的内容,其他保持不变。
def learn(self,obs,action,reward,next_obs,done):
predict_Q = self.Q[obs,action]
if done:
target_Q = reward
else:
target_Q = reward+self.gamma*np.max(self.Q[next_obs,:])
self.Q[obs,action] += self.lr*(target_Q-predict_Q)
def run_episode(env,agent,is_render):
total_reward = 0
total_steps = 0
obs = env.reset()
while True:
action = agent.sample(obs)
next_obs,reward,done,_ = env.step(action)
agent.learn(obs,action,reward,next_obs,done)
obs = next_obs
total_steps += 1
total_reward+=reward
if is_render:
env.render()
if done:
break
return total_reward,total_steps