GAN实战之Pytorch 使用pix2pixGAN生成建筑物图片
pix2pixGAN的相关原理说明参考:
GNA笔记-- pix2pixGAN 网络原理介绍以及论文解读
一、数据集加载
数据集下载:pix2pixGAN训练数据集,建筑物数据集
解压分成后有两个文件夹base和extend,我们将base作为训练集,extend作为测试集进行测试
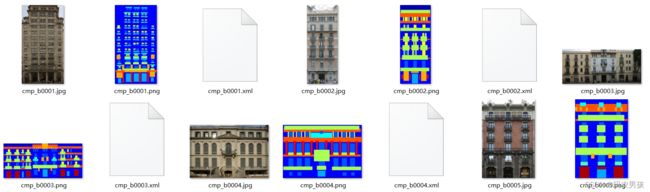
imgs_path = glob.glob('dataset/base/*.jpg')
annos_path = glob.glob('dataset/base/*.png')
transform = transforms.Compose([transforms.ToTensor(),
transforms.Resize((256, 256)),
transforms.Normalize(0.5,0.5)])
class CMP_dataset(data.Dataset):
def __init__(self, imgs_path, annos_path):
self.imgs_path = imgs_path
self.annos_path = annos_path
def __getitem__(self, index):
img_path = self.imgs_path[index]
anno_path = self.annos_path[index]
pil_img = Image.open(img_path)
pil_img = transform(pil_img)
anno_img = Image.open(anno_path)
anno_img = anno_img.convert('RGB')
pil_anno = transform(anno_img)
return pil_anno, pil_img
def __len__(self):
return len(imgs_path)
dataset = CMP_dataset(imgs_path, annos_path)
dataloader = data.DataLoader(dataset, batch_size=32, shuffle=True)二、定义下采样模块和上采样模块
class Downsample(nn.Module):
def __init__(self, in_channels, out_channels):
super(Downsample, self).__init__()
self.conv_relu = nn.Sequential(
nn.Conv2d(in_channels, out_channels,
kernel_size=3,
stride=2,
padding=1),
nn.LeakyReLU(inplace=True),
)
self.bn = nn.BatchNorm2d(out_channels)
def forward(self, x, is_bn=True):
x = self.conv_relu(x)
if is_bn:
x = self.bn(x)
return x
# 定义上采用模块
class Upsample(nn.Module):
def __init__(self, in_channels, out_channels):
super(Upsample, self).__init__()
self.upconv_relu = nn.Sequential(
nn.ConvTranspose2d(in_channels, out_channels,
kernel_size=3,
stride=2,
padding=1,
output_padding=1),
nn.LeakyReLU(inplace=True)
)
self.bn = nn.BatchNorm2d(out_channels)
def forward(self, x, is_drop=False):
x = self.upconv_relu(x)
x = self.bn(x)
if is_drop:
x = F.dropout2d(x)
return x三、定义生成器
我们将定义六层下采样,五层上采样再外加一个输出层,基于UNet结构进行编码
class Generator(nn.Module):
def __init__(self):
super(Generator, self).__init__()
self.down1 = Downsample(3, 64)
self.down2 = Downsample(64, 128)
self.down3 = Downsample(128, 256)
self.down4 = Downsample(256, 512)
self.down5 = Downsample(512, 512)
self.down6 = Downsample(512, 512)
self.up1 = Upsample(512, 512)
self.up2 = Upsample(1024, 512)
self.up3 = Upsample(1024, 256)
self.up4 = Upsample(512, 128)
self.up5 = Upsample(256, 64)
self.last = nn.ConvTranspose2d(128, 3,
kernel_size=3,
stride=2,
padding=1,
output_padding=1)
def forward(self, x):
x1 = self.down1(x, is_bn=False) # torch.Size([8, 64, 128, 128])
x2 = self.down2(x1) # torch.Size([8, 128, 64, 64])
x3 = self.down3(x2) # torch.Size([8, 256, 32, 32])
x4 = self.down4(x3) # torch.Size([8, 512, 16, 16])
x5 = self.down5(x4) # torch.Size([8, 512, 8, 8])
x6 = self.down6(x5) # torch.Size([8, 512, 4, 4])
x6 = self.up1(x6, is_drop=True) # torch.Size([8, 512, 8, 8])
x6 = torch.cat([x5, x6], dim=1) # torch.Size([8, 1024, 8, 8])
x6 = self.up2(x6, is_drop=True) # torch.Size([8, 512, 16, 16])
x6 = torch.cat([x4, x6], dim=1) # torch.Size([8, 1024, 16, 16])
x6 = self.up3(x6, is_drop=True)
x6 = torch.cat([x3, x6], dim=1)
x6 = self.up4(x6)
x6 = torch.cat([x2, x6], dim=1)
x6 = self.up5(x6)
x6 = torch.cat([x1, x6], dim=1)
x6 = torch.tanh(self.last(x6))
return x6
四、定义判别器
# 判别器
class Discriminator(nn.Module):
def __init__(self):
super(Discriminator,self).__init__()
self.down1 = Downsample(6, 64)
self.down2 = Downsample(64, 128)
self.down3 = Downsample(128, 256)
self.conv = nn.Conv2d(256, 512, 3, 1, 1)
self.bn = nn.BatchNorm2d(512)
self.last = nn.Conv2d(512, 1, 3, 1)
def forward(self, anno, img):
x = torch.cat([anno, img], dim=1) # batch*6*H*W
x = self.down1(x, is_bn=False)
x = self.down2(x)
x = F.dropout2d(self.down3(x))
x = F.dropout2d(F.leaky_relu(self.conv(x)))
x = F.dropout2d(self.bn(x))
x = torch.sigmoid(self.last(x))
return x
五、完整代码
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.utils import data
import torchvision
from torchvision import transforms
import numpy as np
import matplotlib.pyplot as plt
import os
import glob
from PIL import Image
imgs_path = glob.glob('dataset/base/*.jpg')
annos_path = glob.glob('dataset/base/*.png')
transform = transforms.Compose([transforms.ToTensor(),
transforms.Resize((256, 256)),
transforms.Normalize(0.5,0.5)])
class CMP_dataset(data.Dataset):
def __init__(self, imgs_path, annos_path):
self.imgs_path = imgs_path
self.annos_path = annos_path
def __getitem__(self, index):
img_path = self.imgs_path[index]
anno_path = self.annos_path[index]
pil_img = Image.open(img_path)
pil_img = transform(pil_img)
anno_img = Image.open(anno_path)
anno_img = anno_img.convert('RGB')
pil_anno = transform(anno_img)
return pil_anno, pil_img
def __len__(self):
return len(imgs_path)
dataset = CMP_dataset(imgs_path, annos_path)
dataloader = data.DataLoader(dataset, batch_size=32, shuffle=True)
# 创建模型
# 定义下采样模块
class Downsample(nn.Module):
def __init__(self, in_channels, out_channels):
super(Downsample, self).__init__()
self.conv_relu = nn.Sequential(
nn.Conv2d(in_channels, out_channels,
kernel_size=3,
stride=2,
padding=1),
nn.LeakyReLU(inplace=True),
)
self.bn = nn.BatchNorm2d(out_channels)
def forward(self, x, is_bn=True):
x = self.conv_relu(x)
if is_bn:
x = self.bn(x)
return x
# 定义上采用模块
class Upsample(nn.Module):
def __init__(self, in_channels, out_channels):
super(Upsample, self).__init__()
self.upconv_relu = nn.Sequential(
nn.ConvTranspose2d(in_channels, out_channels,
kernel_size=3,
stride=2,
padding=1,
output_padding=1),
nn.LeakyReLU(inplace=True)
)
self.bn = nn.BatchNorm2d(out_channels)
def forward(self, x, is_drop=False):
x = self.upconv_relu(x)
x = self.bn(x)
if is_drop:
x = F.dropout2d(x)
return x
# 定义生成器:六个下采样层,五个上采样层,一个输出层
# UNet结构
class Generator(nn.Module):
def __init__(self):
super(Generator, self).__init__()
self.down1 = Downsample(3, 64)
self.down2 = Downsample(64, 128)
self.down3 = Downsample(128, 256)
self.down4 = Downsample(256, 512)
self.down5 = Downsample(512, 512)
self.down6 = Downsample(512, 512)
self.up1 = Upsample(512, 512)
self.up2 = Upsample(1024, 512)
self.up3 = Upsample(1024, 256)
self.up4 = Upsample(512, 128)
self.up5 = Upsample(256, 64)
self.last = nn.ConvTranspose2d(128, 3,
kernel_size=3,
stride=2,
padding=1,
output_padding=1)
def forward(self, x):
x1 = self.down1(x, is_bn=False) # torch.Size([8, 64, 128, 128])
x2 = self.down2(x1) # torch.Size([8, 128, 64, 64])
x3 = self.down3(x2) # torch.Size([8, 256, 32, 32])
x4 = self.down4(x3) # torch.Size([8, 512, 16, 16])
x5 = self.down5(x4) # torch.Size([8, 512, 8, 8])
x6 = self.down6(x5) # torch.Size([8, 512, 4, 4])
x6 = self.up1(x6, is_drop=True) # torch.Size([8, 512, 8, 8])
x6 = torch.cat([x5, x6], dim=1) # torch.Size([8, 1024, 8, 8])
x6 = self.up2(x6, is_drop=True) # torch.Size([8, 512, 16, 16])
x6 = torch.cat([x4, x6], dim=1) # torch.Size([8, 1024, 16, 16])
x6 = self.up3(x6, is_drop=True)
x6 = torch.cat([x3, x6], dim=1)
x6 = self.up4(x6)
x6 = torch.cat([x2, x6], dim=1)
x6 = self.up5(x6)
x6 = torch.cat([x1, x6], dim=1)
x6 = torch.tanh(self.last(x6))
return x6
# 判别器
class Discriminator(nn.Module):
def __init__(self):
super(Discriminator,self).__init__()
self.down1 = Downsample(6, 64)
self.down2 = Downsample(64, 128)
self.down3 = Downsample(128, 256)
self.conv = nn.Conv2d(256, 512, 3, 1, 1)
self.bn = nn.BatchNorm2d(512)
self.last = nn.Conv2d(512, 1, 3, 1)
def forward(self, anno, img):
x = torch.cat([anno, img], dim=1) # batch*6*H*W
x = self.down1(x, is_bn=False)
x = self.down2(x)
x = F.dropout2d(self.down3(x))
x = F.dropout2d(F.leaky_relu(self.conv(x)))
x = F.dropout2d(self.bn(x))
x = torch.sigmoid(self.last(x))
return x
device = 'cuda' if torch.cuda.is_available() else 'cpu'
gen = Generator().to(device)
dis = Discriminator().to(device)
# 定义损失函数
# cgan损失函数
loss_fn = torch.nn.BCELoss()
d_optimizer = torch.optim.Adam(dis.parameters(), lr=2e-4, betas=(0.5, 0.999))
g_optimizer = torch.optim.Adam(gen.parameters(), lr=2e-4, betas=(0.5, 0.999))
# 绘图函数
def generate_images(model, test_input, true_target):
prediction = model(test_input).permute(0, 2, 3, 1).detach().cpu().numpy()
test_input = test_input.permute(0, 2, 3, 1).cpu().numpy()
true_target = true_target.permute(0, 2, 3, 1).cpu().numpy()
plt.figure(figsize=(5, 5))
display_list = [test_input[0], true_target[0], prediction[0]]
title = ['Input Image', 'Ground Truth', 'Predicted Image']
for i in range(3):
plt.subplot(1, 3, i+1)
plt.title(title[i])
plt.imshow(display_list[i] * 0.5 + 0.5)
plt.axis('off')
plt.show()
test_imgs_path = glob.glob('dataset/extended/*.jpg')
test_annos_path = glob.glob('dataset/extended/*.png')
test_dataset = CMP_dataset(test_imgs_path, test_annos_path)
test_dataloader = data.DataLoader(test_dataset, batch_size=32)
LAMBDA = 10 # L1损失的权重
annos_batch, imgs_batch = next(iter(test_dataloader))
imgs_batch = imgs_batch.to(device)
annos_batch = annos_batch.to(device)
D_loss = [] # 记录训练过程中判别器loss变化
G_loss = [] # 记录训练过程中生成器loss变化
# 开始训练
for epoch in range(100):
D_epoch_loss = 0
G_epoch_loss = 0
count = len(dataloader)
for step, (annos, imgs) in enumerate(dataloader):
imgs = imgs.to(device)
annos = annos.to(device)
d_optimizer.zero_grad()
disc_real_output = dis(annos, imgs) # 判别器输入真实图片
d_real_loss = loss_fn(disc_real_output,
torch.ones_like(disc_real_output, device=device))
d_real_loss.backward()
# 生成器输入随机张量得到生成图片
gen_output = gen(annos)
disc_gen_output = dis(annos, gen_output.detach())
d_fake_loss = loss_fn(disc_gen_output,
torch.zeros_like(disc_gen_output, device=device))
d_fake_loss.backward()
disc_loss = d_real_loss + d_fake_loss # 判别器的总损失
d_optimizer.step()
g_optimizer.zero_grad()
disc_gen_output = dis(annos, gen_output) # 判别器输入生成图像
gen_loss_crossentropy = loss_fn(disc_gen_output,
torch.ones_like(disc_gen_output, device=device))
gen_l1_loss = torch.mean(torch.abs(imgs - gen_output)) # L1损失
gen_loss = gen_loss_crossentropy + (LAMBDA * gen_l1_loss)
gen_loss.backward()
g_optimizer.step()
with torch.no_grad():
D_epoch_loss += disc_loss.item()
G_epoch_loss += gen_loss.item()
# generate_images(gen, imgs_batch, musks_batch)
with torch.no_grad():
D_epoch_loss /= count
G_epoch_loss /= count
D_loss.append(D_epoch_loss)
G_loss.append(G_epoch_loss)
# 训练完一个Epoch,打印提示并绘制生成的图片
print("Epoch:", epoch)
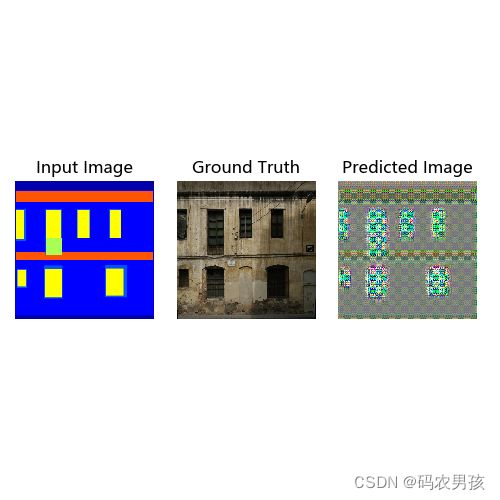
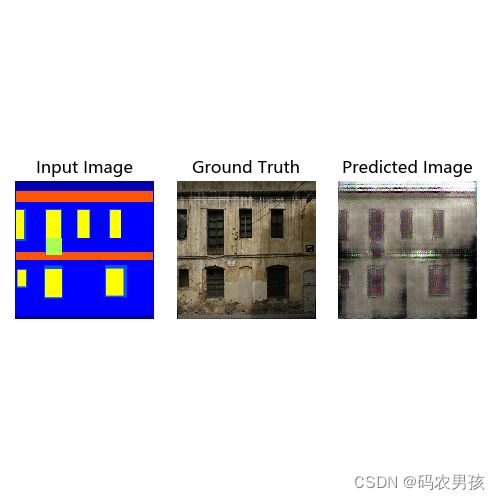
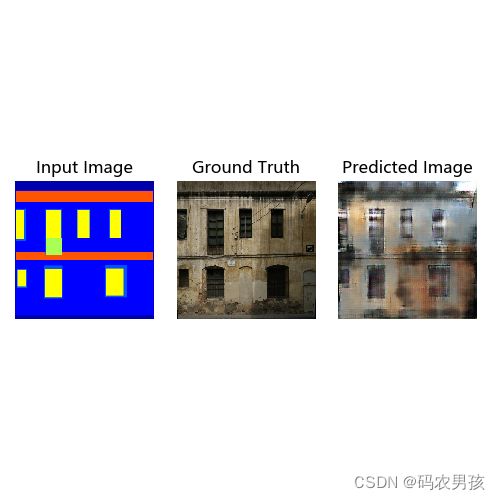
generate_images(gen, annos_batch, imgs_batch)六、结果展示
分别为Epoch0、Epoch50、Epoch100