读书笔记-计算机视觉
文章目录
- 1. 图像增广
- 2. 微调
- 3. 目标检测和边界框
-
- 3.1 锚框坐标转换
- 4. 锚框
-
- 4.1 锚框
- 4.2 交并比
- 4.3 将最接近的真实边界框分配给锚框
- 4.4 锚框偏移量归一化
- 4.5 使用真实边界框标记锚框
- 4.6 极大值抑制预测边界框
- 5. 多尺度目标检测
-
- 5.1 多尺度锚框
- 5.2 多尺度检测
- 6. 目标检测数据集
-
- 6.1 数据集预处理思路
- 6.2 源码
- 6.3 结果
1. 图像增广
- 代码
# -*- coding: utf-8 -*-
# @Project: zc
# @Author: zc
# @File name: Image Augmentation
# @Create time: 2021/12/15 19:16
# 1.导入数据库
import matplotlib.pyplot as plt
import torch
import torchvision
from torch import nn
from d2l import torch as d2l
# 2. 从官网上下载 CIFAR10 的训练数据集
all_images = torchvision.datasets.CIFAR10(train=True, root="../data",
download=True)
# 3. 显示 CIFAR10 前32个数据集
d2l.show_images([all_images[i][0] for i in range(32)], 4, 8, scale=0.8)
# 4.训练集数据增强的方式,用 Compose 进行组合
train_augs = torchvision.transforms.Compose([
torchvision.transforms.RandomHorizontalFlip(),
torchvision.transforms.ToTensor()])
# 5. 我们不需要对测试集进行数据增强,只需要转换成张量即可
test_augs = torchvision.transforms.Compose([
torchvision.transforms.ToTensor()])
# 6. 下载 CIFAR10 并将数据转换成 DataLoader
def load_cifar10(is_train, augs, batch_size):
dataset = torchvision.datasets.CIFAR10(root="../data", train=is_train,
transform=augs, download=True)
dataloader = torch.utils.data.DataLoader(dataset, batch_size=batch_size,
shuffle=is_train, num_workers=d2l.get_dataloader_workers())
return dataloader
# 7.用多 GPU 进行小批量训练
def train_batch_ch13(net, X, y, loss, trainer, devices):
"""
:param net: 定义的神经网络
:param X: 实际的特征 features
:param y: 实际的标签 label
:param loss: 损失
:param trainer: 优化器
:param devices: 在 GPU 或者 CPU 上训练
:return: train_loss_sum:训练损失总和;train_acc_sum:训练精度总和
"""
"""用多GPU进行小批量训练"""
if isinstance(X, list):
# 微调BERT中所需(稍后讨论),在 BERT 中是通过前面几个样本预测后面的字符,所以X输入为列表
X = [x.to(devices[0]) for x in X]
else:
X = X.to(devices[0]) # 如果 X 是单个的值,就直接喂到 GPU 上
y = y.to(devices[0]) # 将标签 Y 喂到 GPU 上
net.train() # 神经网络训练模式,nn.batch_Norm 和 nn.Dropout 不启用
trainer.zero_grad() # 将优化器的梯度清零
pred = net(X) # 特征 X 通过神经网络得到 pred 预测
l = loss(pred, y) # 计算预测 pred 和真实标签 y 之间的差值作为损失值
l.sum().backward() # 将损失求和成标量后回传求梯度
trainer.step() # 优化器更新权重
train_loss_sum = l.sum() # 计算训练损失总和
train_acc_sum = d2l.accuracy(pred, y) # 计算训练精度总和
return train_loss_sum, train_acc_sum # 返回 训练损失总和,训练精度总和
# 8.用多GPU进行模型训练
def train_ch13(net, train_iter, test_iter, loss, trainer, num_epochs,
devices=d2l.try_all_gpus()):
"""
:param net: 定义神经网络
:param train_iter: 定义训练集迭代器
:param test_iter: 定义测试机迭代器
:param loss: 定义损失函数,评判预测值和实际值的偏差
:param trainer: 定义优化器
:param num_epochs: 定义训练几轮
:param devices: 定义是在 GPU 还是 CPU 上进行
:return:
"""
timer, num_batches = d2l.Timer(), len(train_iter) # 定义计时器和批量大小
animator = d2l.Animator(xlabel='epoch', xlim=[1, num_epochs], ylim=[0, 1], # 做动画
legend=['train loss', 'train acc', 'test acc'])
net = nn.DataParallel(net, device_ids=devices).to(devices[0]) # 定义网络并行
for epoch in range(num_epochs): # 开始训练
# 4个维度:储存训练损失,训练准确度,实例数,特点数
metric = d2l.Accumulator(4) # 定义累加器
for i, (features, labels) in enumerate(train_iter): # 逐个枚举训练迭代器的(特征,标签)
timer.start() # 开始计时
l, acc = train_batch_ch13( # 用多 GPU 进行小批量训练
net, features, labels, loss, trainer, devices)
metric.add(l, acc, labels.shape[0], labels.numel()) # 动态图增加点
timer.stop() # 计时结束
if (i + 1) % (num_batches // 5) == 0 or i == num_batches - 1:
animator.add(epoch + (i + 1) / num_batches,
(metric[0] / metric[2], metric[1] / metric[3],
None))
test_acc = d2l.evaluate_accuracy_gpu(net, test_iter) # 将预测值和测试集数据比较计算精度
animator.add(epoch + 1, (None, None, test_acc))
print(f'loss {metric[0] / metric[2]:.3f}, train acc '
f'{metric[1] / metric[3]:.3f}, test acc {test_acc:.3f}')
print(f'{metric[2] * num_epochs / timer.sum():.1f} examples/sec on '
f'{str(devices)}')
# 9. 定义批量大小,GPU ,神经网络 net=resnet18
batch_size, devices, net = 256, d2l.try_all_gpus(), d2l.resnet18(10, 3)
# 10. 初始化权重,用 xavier 初始化,便于训练
def init_weights(m):
if type(m) in [nn.Linear, nn.Conv2d]:
nn.init.xavier_uniform_(m.weight)
# 11. 网络权重初始化
net.apply(init_weights)
# 12. 定义函数,功能是训练网络,运用数据增广 train_augs,test_augs
def train_with_data_aug(train_augs, test_augs, net, lr=0.001):
"""
:param train_augs: 训练集的在线数据增广
:param test_augs: 测试集图像直接转张量,不做
:param net: 定义神经网络
:param lr: 设置学习率
:return:
"""
train_iter = load_cifar10(True, train_augs, batch_size) # 下载cifar10的训练集,转换成 dataloader
test_iter = load_cifar10(False, test_augs, batch_size) # 下载cifar10的测试集,转换成 dataloader
loss = nn.CrossEntropyLoss(reduction="none") # 定义损失为交叉熵损失
trainer = torch.optim.Adam(net.parameters(), lr=lr) # 定义优化器 Adam ,此优化器对学习率不敏感,方便训练
train_ch13(net, train_iter, test_iter, loss, trainer, 10, devices) # 用多GPU进行模型训练
# 13.调用函数,开始训练神经网络
train_with_data_aug(train_augs, test_augs, net)
# 14. 显示结果
plt.show()
- 结果
loss 0.168, train acc 0.942, test acc 0.845
826.6 examples/sec on [device(type='cuda', index=0)]

2. 微调
-
微调思路
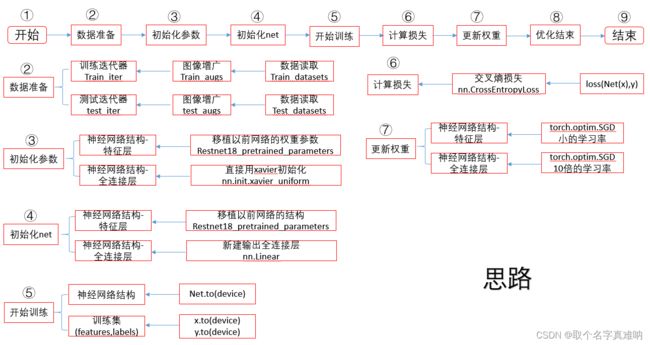
-
代码
import matplotli.pylot as plt
import os
import torch
import torchvision
from torch import nn
from d2l import torch as d2l
d2l.DATA_HUB['hotdog'] = (d2l.DATA_URL + 'hotdog.zip',
'fba480ffa8aa7e0febbb511d181409f899b9baa5')
data_dir = d2l.download_extract('hotdog')
train_imgs = torchvision.datasets.ImageFolder(os.path.join(data_dir,'train'))
test_imgs = torchvision.datasets.ImageFlolder(os.path.join(data_dir,'test'))
normalize = torchvision.transforms.Normalize(
[0.485,0.456,0.406],[0.229,0.224,0.225])
train_augs= torchvision.transforms.Compose([
torchvision.transforms.RandomResizedCrop(224),
torchvision.transforms.RandomHorizontalFlip(),
torchvision.transforms.ToTensor(),
normalize])
test_augs = torchvision.transforms.Compose([
torchvision.transforms.Resize(256),
torchvision.transforms.CenterCrop(224),
torchvision.transforms.ToTensor(),
normalize])
pretrained_net = torchvision.models.resnet18(pretrained=True)
# finetune_net = 特征层 + 输出层 fc(全连接层=in_features,out_features)
# 步骤1 :将预训练模型中的特征层下载,给一个小的学习率
# 步骤2 :将最后一个全连接层切割掉
# 步骤3 :将最后一个全连接层嫁接到新的全连接层,输出为新的类型数
# 步骤4 :将最后一个全连接层的权重和偏移进行初始化
finetune_net = torchvision.models.resnet18(pretrained=True)
finetune_net.fc = nn.Linear(finetune_net.fc.in_features,2)
nn.init.xavier_uniform_(finetune_net.fc.weight)
# net: 神经网络
# learning_rate:学习率
# batch_size:批量大小
# num_epochs: 整个训练集迭代次数
# param_group:判断是否为最后一个全连接层
def train_fine_tuning(net,learning_rate,batch_size=128,num_epochs=5,
param_group=True):
# 训练迭代器,数据增广train_augs,随机打乱训练集
train_iter = torch.utils.data.DataLoader(torchvision.datasets.ImageFolder(
os.path.join(data_dir,'train'),transforms=train_augs),
batch_size=batch_size,shuffle=True)
# 测试迭代器,数据增广train_augs,
test_iter = torch.utils.data.DataLoader(torchvision.datasets.ImageFolder(
os.path.join(data_dir,'test'),transforms=test_augs),
batch_size=batch_size)
# 训练 GPU 或 CPU
devices = d2l.try_all_gpus()
# 损失为交叉熵损失,reduction="none"
loss= nn.CrossEntropyLoss(reduction="none")
# 判断参数是不是最后一个全连接层,如果param_group=True,就用10倍学习率,
# 其他为指定学习率 learning_rate,并权重衰减 weight_decay=0.01
if param_group:
params_1x = [param for name,param in net.named_parameters()
if name not in ["fc.weight","fc.bias"]]
trainer = torch.optim.SGD([{'params':params_1x},
{'params':net.fc.parameters(),
'lr': learning_rate*10}],
lr=learning_rate,weight_decay=0.01)
else:
trainer = torch.optiom.SGD(net.parameters(),lr=learning_rate,
weight_decay=0.001)
# 开始训练
d2l.train_ch13(net,train_iter,test_iter,loss,trainer,num_epochs,device)
# 指定神经网络 net=finetune_net,学习率 learning
train_fine_tuning(finetune_net,5e-5)
3. 目标检测和边界框
3.1 锚框坐标转换
- 如图所示

- 方法1:已知两个角的坐标(x1,y1),(x2,y2),来求得中心点坐标(cx,cy),高h,宽w:
c x = ( x 1 + x 2 ) / 2 c_x =(x_1+x_2)/2 cx=(x1+x2)/2
c y = ( y 1 + y 2 ) / 2 c_y = (y_1+y_2)/2 cy=(y1+y2)/2
w = x 2 − x 1 w = x_2-x_1 w=x2−x1
h = y 2 − y 1 h=y_2-y_1 h=y2−y1 - 方法2:已知中心点坐标(cx,cy),高h,宽w,来求得两个角的坐标(x1,y1),(x2,y2);
x 1 = c x − w / 2 x_1 = c_x-w/2 x1=cx−w/2
x 2 = c x + w / 2 x_2 = c_x +w/2 x2=cx+w/2
y 1 = c y − h / 2 y_1 = c_y-h/2 y1=cy−h/2
y 2 = c y + h / 2 y_2 = c_y+h/2 y2=cy+h/2 - 代码如下:
# 1.导入相关数据数据库
import torch
import torchvision
from d2l import torch as d2l
import matplotlib.pyplot as plt
# 2.中心坐标 -> 边缘坐标
def box_corner_to_center(boxes):
"""Convert from (upper-left, lower-right) to (center, width, height)."""
x1, y1, x2, y2 = boxes[:, 0], boxes[:, 1], boxes[:, 2], boxes[:, 3]
cx = (x1 + x2) / 2
cy = (y1 + y2) / 2
w = x2 - x1
h = y2 - y1
boxes = torch.stack((cx, cy, w, h), axis=-1) # 堆叠在一起
return boxes
# 3.边缘坐标 -> 中心坐标
def box_center_to_corner(boxes):
"""Convert from (center, width, height) to (upper-left, lower-right)."""
cx, cy, w, h = boxes[:, 0], boxes[:, 1], boxes[:, 2], boxes[:, 3]
x1 = cx - 0.5 * w
y1 = cy - 0.5 * h
x2 = cx + 0.5 * w
y2 = cy + 0.5 * h
boxes = torch.stack((x1, y1, x2, y2), axis=-1) # 堆叠在一起
return boxes
4. 锚框
4.1 锚框
- 生成成以每个像素为中⼼具有不同形状的锚框
- 代码
# 1.导入相关数据库
import matplotlib.pyplot as plt
import torch
from d2l import torch as d2l
# 2.生成以每个像素为中心具有不同形状的锚框
# in_height:高;in_width:宽
# size:缩放比;ratios:宽高比
# 一般组合为:
# 定义一个大小S_1,遍历所有的ratios;
# 定义一个宽高比ratios,遍历所有的缩放比例s
# 所有的组合一共为 num_sizes+num_ratios-1
# data:输入的图像
# size:缩放比例
# ratios: 宽高比
def multibox_prior(data,size,ratios):
# 获取图片的高,宽
in_height,in_width = data.shape[-2:]
# 获取设备CPU或GPU,缩放比size张量集,宽高比ratio张量集大小
device,num_sizes,num_ratios = data.device,len(sizes),len(ratios)
# 得到所有的组合 s+r-1
boxes_per_pixel = (num_sizes+num_ratios-1)
# 将列表转换成张量
size_tensor = torch.tensor(size,device=device)
ratio_tensor = torch.tensor(ratios,device=device)
# 因为每个像素的高,宽各为 1
offset_h,offset_w = 0.5,0.5
setps_h = 1.0 /in_height # 在 y 轴上缩放步长
setps_w = 1.0 /in_width # 在 x 轴上缩放步长
# 生成锚框的所有中心点
# 将每个像素的值加上0.5后除以总长得到中心缩放后的点坐标
# 公式:(in_height+offset_h)/steps_h
center_h = (torch.arange(in_height,device=device)+offset_h)*steps_h
center_w = (torch.arange(in_width,device=device)+offset_w)*steps_w
# 根据中心点获取网格,并将张量变成一串
shift_y,shift_x = torch.meshgrid(center_h,center_w)
shift_y,shift_x = shift_y.reshape(-1),shift_x.reshape(-1)
# 生成"boxes_per_pixel"个高和宽
# 之后用于创建锚框的四角坐标(xmin,xmax,ymin,ymax)
w = torch.cat((size_tensor*torch.sqrt(ratio_tensor[0]),
size[0]*torch.sqrt(ratio_tensor[1:])))\
*in_height / in_width
h = torch.cat((size_tensor / torch.sqrt(ratio_tensor[0]),
sizes[0]/torch.sqrt(ratio_tensor[1:])))
# 除以2来获得半高和半宽
anchor_manipulations = torch.stack((-w,-h,w,h).T.repeat(
in_heigth*in_width,1)/2)
# 每个中心点都将有"boxes_per_pixel"个锚框
# 所以生成含所有锚框中心的网络,重复了"boxes_per_pixel"次
# unsqueeze(0)在第0中插入一个新的维度
# repeat_interleave 重复函数
out_grid = torch.stack([shift_x,shift_y,shift_x,shift_y],
dim=1).repeat_interleave(boxes_per_pixel,dim=0)
output = out_grid + anchor_manipulations
return output.unsqueeze(0)
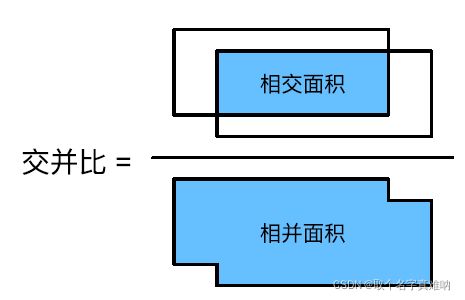
4.2 交并比
- 定义
交并比指的是一个两个框 box1,box2 之间的交集和并集的比值 - 图形
- 代码
# 1.导入相关库
import torch
from d2l import torch as d2l
# 2. 定义计算交并比
def box_iou(boxes1, boxes2):
"""
function: 计算两个锚框或边缘框列表中成对的交并比
:param box1: (x1,x2,y1,y2);左上坐标(x1,y1);右下坐标(x2,y2)
:param box2: (x1,x2,y1,y2);左上坐标(x1,y1);右下坐标(x2,y2)
:return:交并比
"""
# box_area = (x2-x1)*(y2-y1)
box_area = lambda boxes: ((boxes[:, 2] - boxes[:, 0]) *
(boxes[:, 3] - boxes[:, 1]))
# boxes1,boxes2,areas1,areas2的形状:
# boxes1:(boxes1的数量,4),[x1,y1,x2,y2]
# boxes2:(boxes2的数量,4),[x1,y1,x2,y2]
# areas1:(boxes1的数量,), [area1,]
# areas2:(boxes2的数量,)[area2,]
areas1 = box_area(box1)
areas2 = box_area(box2)
# boxes1[:,None,:2] 取前面两个坐标值;boxes2[:,:2]:取坐标的后两个
# 计算交集的inter_upperlefts左上点,inter_lowerrights右下点
# 张量中用 None 可以对张量新增一个维度,这里是在第 1 维增加
inter_upperlefts = torch.max(boxes1[:, None, :2], boxes2[:, :2])
inter_lowerrights = torch.min(boxes1[:, None, 2:], boxes2[:, 2:])
# inters:差值取正 如果值小于0,则元素值为0
inters = (inter_lowerrights - inter_upperlefts).clamp(min=0)
# 计算交集的面积
inter_areas = inters[:, :, 0] * inters[:, :, 1]
# 计算并集 并集 = 面积1 + 面积2 - 交集
union_areas = areas1[:, None] + areas2 - inter_areas
# 返回交并比
return inter_areas / union_areas
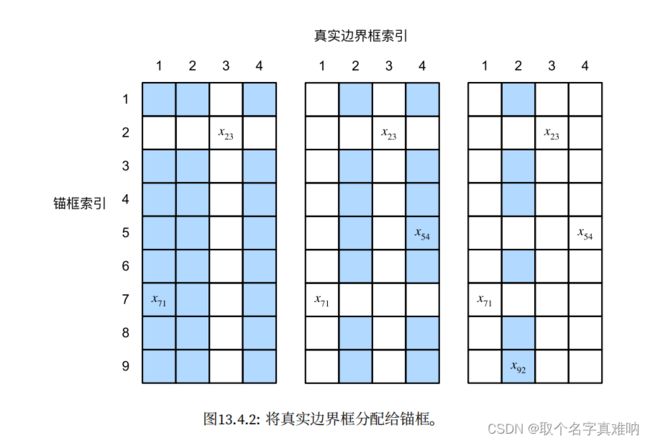
4.3 将最接近的真实边界框分配给锚框
在目标检测中,我们需要将每个锚框看作成一个训练样本,我们随机生成锚框,锚框包含类别和偏移量。这样我们就可以通过偏移量,将数据集中的真实的边界框通过偏移量分配给锚框,注意这里是将最接近的真实边界框分配给锚框,注意分配的方向。
-
原理
让我们⽤⼀个具体的例⼦来说明上述算法。如 图13.4.2(左)所⽰,假设矩阵X中的最⼤值为x23,我们将真实边界框B3分配给锚框A2。然后,我们丢弃矩阵第2⾏和第3列中的所有元素,在剩余元素(阴影区域)中找到最⼤的x71,然后将真实边界框B1分配给锚框A7。接下来,如 图13.4.2(中)所⽰,丢弃矩阵第7⾏和第1列中的所有元素,在剩余元素(阴影区域)中找到最⼤的x54,然后将真实边界框B4分配给锚框A5。最后,如图13.4.2(右)所⽰,丢弃矩阵第5⾏和第4列中的所有元素,在剩余元素(阴影区域)中找到最⼤的x92,然后将真实边界框B2分配给锚框A9。之后,我们只需要遍历剩余的锚框A1, A3, A4, A6, A8,然后根据阈值确定是否为它们分配真实边界框。
-
思路

-
代码
def assign_anchor_to_bbox(ground_truth, anchors, device, iou_threshould=0.5):
"""
function : 将最接近的真实边界框分配给锚框
:param ground_truth: 人工标注的边界框
:param anchors: 随机生成的锚框
:param device: GPU 或 CPU
:param iou_threshould: 交并比设置,如果大于此值通过
:return: anchors_bbox_map
"""
# 获得锚框的数量和真实标签框的数量
num_anchors, num_gt_boxes = anchors.shape[0], ground_truth.shape[0]
# 计算随机锚框与真实标签框的交并比
# 位于第 i 行和第 j 列的元素 x_ij 是锚框 i 和 真实边界框 j 的 IoU
jaccard = box_iou(anchors, ground_truth)
# 对于每个锚框,分配的真实边界框的张量,我们先用 -1 填充
anchors_bbox_map = torch.full((num_anchors,), -1, dtype=torch.long,
device=device)
# 根据阈值,决定是否分配真实边界框,获得最大的 jaccard 的锚框
# max_ious :最大的交并比值;indices :该行最大交并比值对应的序号
max_ious, indices = torch.max(jaccard, dim=1)
# 找到 max_ious 中 大于0.5 的锚框,获得索引值,变成行向量;
# 两两一对[行数a,索引a,...行数j,索引j,]
# anc_i 存储索引值
anc_i = torch.nonzero(max_ious >= 0.5).reshape(-1)
# box_j 存储对应索引值
box_j = indices[max_ious >= 0.5]
# 得到映射
anchors_bbox_map[anc_i] = box_j
# 列 cols 表示锚框数
col_discard = torch.full((num_anchors,), -1)
# 行 rows 表示真实边框数
row_discard = torch.full((num_gt_boxes,), -1)
for _ in range(num_gt_boxes):
# 开始计算得到最大jaccard
max_idx = torch.argmax(jaccard)
box_idx = (max_idx % num_gt_boxes).long()
anc_idx = (max_idx / num_gt_boxes).long()
# 根据锚框来找到边框
anchors_bbox_map[anc_idx] = box_idx
# 将列丢掉
jaccard[:, box_idx] = col_discard
# 将行丢掉
jaccard[anc_idx, :] = row_discard
return anchors_bbox_map
4.4 锚框偏移量归一化
当我们得到了锚框时,获得了锚框的类别和偏移量,锚框A的偏移量将根据B和A中心坐标的相对位置以及这两个框的相对大小进行标记。我们定义框A和B,中心坐标分别为
A : ( x a , y a , w a , h a ) ; B : ( x b , y b , w b , h b ) A:(x_a,y_a,w_a,h_a);B:(x_b,y_b,w_b,h_b) A:(xa,ya,wa,ha);B:(xb,yb,wb,hb)
- 我们将 A 相对于B的偏移量标记为:
( x b − x a w a − μ x σ x , y b − y a h a − μ y σ y , log w b w a − μ w σ w , log h b h a − μ h σ h ) (\frac{\frac{x_b-x_a}{w_a}-\mu_x}{\sigma_x},\frac{\frac{y_b-y_a}{h_a}-\mu_y}{\sigma_y},\frac{\log\frac{w_b}{w_a}-\mu_w}{\sigma_w},\frac{\log\frac{h_b}{h_a}-\mu_h}{\sigma_h}) (σxwaxb−xa−μx,σyhayb−ya−μy,σwlogwawb−μw,σhloghahb−μh) - 代码
import torch
from d2l import torch as d2l
def offset_box(anchors, asigned_bb, eps=le - 6):
"""
function:对锚框偏移量进行转换
:param anchors: 锚框
:param asigned_bb:被分配的边框
:param eps: 防止除零
:return: 防止偏移
"""
# 将锚框变成(x_1,x_2,w_1,h_1)
c_anc = d2l.box_corner_to_center(anchors)
# 将边缘框变成(x_1,x_2,w_1,h_1)
c_asigned_bb = d2l.box_corner_to_center(asigned_bb)
# 坐标,高宽归一化
offset_xy = 10 * (c_asigned_bb[:, :2] - c_anc[:, :2]) / c_anc[:, 2:]
offset_wh = 5 * torch.log(eps + c_asigned_bb[:, 2:] / c_anc[:, 2:])
# 将(坐标,高宽)拼接
offset = torch.cat([offset_xy, offset_wh], axis=1)
return offset
4.5 使用真实边界框标记锚框
- 类别数:[用户指定的类别 + 1];1表示的背景类,如果没有识别就为背景类
- 代码
def multibox_target(anchors, labels):
"""
function : 使用真实边界框标记锚框
:param anchors: 锚框; [batch_size,x_1,y_1,x_2,y_2]
:param labels: 标签 [batch_size,labels,x_1,y_1,x_2,y_2]
:return:bbox_offset[边缘框的偏移], bbox_mask[边缘框的掩码], class_labels[标签类别]
"""
# 定义批量大小和锚框,
# anchors.squeeze 表示:如果第 0 维大小为 1 ,则移除
batch_size, anchors = labels.shape[0], anchors.squeeze(0)
# 创建变量列表
batch_offset, batch_mask, batch_class_labels = [], [], []
# device = GPU,设置锚框大小
device, num_anchors = anchors.device, anchors.shape[0]
for i in range(batch_size):
# 获取第 i 个 批量的标签 labels
label = labels[i, :, :]
# 将最接近的真实边界框分配给锚框
anchors_bbox_map = assign_anchor_to_bbox(label[:, 1:], anchors, device)
# 获得真实边缘框的掩码mask ,如果 anchors_bbox_map >=0 则为1,否则为 0
bbox_mask = ((anchors_bbox_map >= 0).float().unsqueeze(-1)).repeat(1, 4)
# 将类标签和分配的边界框坐标初始化为零
class_labels = torch.zeros(num_anchors, dtype=torch.long, device=device)
assigned_bb = torch.zeros((num_anchors, 4), dtype=torch.float32, device=device)
# 使用真实边界框来标记锚框的类别
# 如果一个锚框没有被分配,我们标签机其为背景(值为零)
indices_true = torch.nonzero(anchors_bbox_map >= 0)
bb_idx = anchors_bbox_map[indices_true]
class_labels[indices_true] = label[bb_idx, 0].long() + 1
assigned_bb[indices_true] = label[bb_idx, 1:]
# 偏移量转换
offset = offset_boxes(anchors, assigned_bb) * bbox_mask
batch_offset.append(offset.reshape(-1))
batch_mask.append(bbox_mask.reshape(-1))
batch_class_labels.append(class_labels)
bbox_offset = torch.stack(batch_offset)
bbox_mask = torch.stack(batch_mask)
class_labels = torch.stack(batch_class_labels)
return (bbox_offset, bbox_mask, class_labels)
4.6 极大值抑制预测边界框
非极大值抑制(non_maximum suppression,NMS)的出现是为了解决在预测中,如果我们对于同样一个目标进行多次预测时,我们需要将多个预测的目标进行求最大的那个目标,这样我们就需要使用非机制抑制.这种技术在目标检测中经常用到。
- offset_inverse
根据带有预测偏移量的锚框来预测边界框
def offset_inverse(anchors, offset_preds):
"""
function: 根据带有预测偏移量的锚框来预测边界框
锚框 + 预测偏移量 ->预测-> 预测边界框
我们有一堆的锚框,我们需要通过跟标注的边缘框的距离来预测
这些锚框属于那个类别的锚框
:param anchors: 锚框 [x_1,y_1,x_2,y_2]
:param offset_preds: 预测偏移量;[x,y,w,h]
:return: 预测的边界框
"""
# [x_1,y_1,x_2,y_2] --> anc = [x,y,w,h]
anc = d2l.box_corner_to_center(anchors)
# 没弄明白为什么要这么做
pred_bbox_xy = (offset_preds[:, :2] * anc[:, 2:] / 10) + anc[:, :2]
pred_bbox_wh = torch.exp(offset_preds[:, 2:] / 5) * anc[:, 2:]
# pred_bbox [x,y,w,h]
pred_bbox = torch.cat((pred_bbox_xy, pred_bbox_wh), axis=1)
predicted_bbox = d2l.box_center_to_corner(pred_bbox)
return predicted_bbox
- nms
具体流程如下:
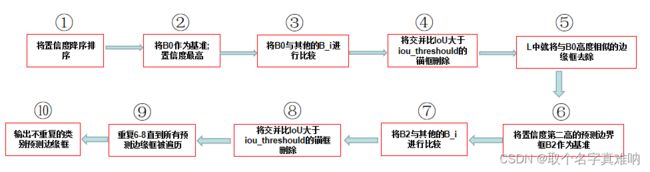
def nms(boxes, scores, iou_threshould):
"""
function : 对预测边界框的置信度进行排序
:param boxes: 预测边界框
:param scores: 置信度
:param iou_threshould: 设置丢弃的交并比值
:return: 保留预测边界框的指标
"""
# 对置信度进行降序排序,B 表示降序后的索引值
B = torch.argsort(scores, dim=-1, descending=True)
# 设置保留的列表,保留预测边界框的指标
keep = []
while B.numel() > 0:
i = B[0] # 将列表中最大置信度作为B0基准
keep.append(i)
if B.numel() == 1: break
iou = box_iou(boxes[i, :].reshape(-1, 4), # 将B0与其他的锚框进行交并比 IoU
boxes[B[1:], :].reshape(-1, 4)).reshape(-1)
# torch.nonzero 返回的不为零的值所在的索引位置
inds = torch.nonzero(iou <= iou_threshould).reshape(-1)
B = B[inds + 1]
return torch.tensor(keep, device=boxes.device)
- multibox_detection
def multibox_detection(cls_probs, offset_preds, anchors, nms_threshould=0.5,
pos_threshould=0.009999999):
"""
function: 使用非极大值抑制来预测边界框
:param cls_probs:类别的概率大小[batch_size,num_classes,num_anchors]
:param offset_preds:偏移预测值
:param anchors:锚框 [batch_size,x1,y1,x2,y2]
:param nms_threshould: nms的丢弃交并比
:param pos_threshould:
:return:[batch_size,num_anchors,class,Confidence_interval,x1,y1,x2,y2]
"""
device, batch_size = cls_probs.device, cls_probs.shape[0]
anchors = anchors.squeeze(0) # [x1,y1,x2,y2]
num_classes, num_anchors = cls_probs.shape[1], cls_probs.shape[2]
out = []
for i in range(batch_size):
cls_probs, offset_preds = cls_probs[i], offset_preds[i].reshape(-1, 4)
conf, class_id = torch.max(cls_probs[1:], 0)
# predicted_bb = [x1,y1,x2,y2]
predicted_bb = offset_inverse(anchors, offset_preds)
keep = nms(predicted_bb, conf, nms_threshould)
all_idx = torch.arange(num_anchors, dtype=torch.long, device=device)
combined = torch.cat((keep, all_idx))
uniques, counts = combined.unique(return_counts=True)
non_keep = uniques[counts == 1]
all_idx_sorted = torch.cat((keep, non_keep))
class_id[non_keep] = -1
class_id = class_id[all_idx_sorted]
conf, predicted_bb = conf[all_idx_sorted], predicted_bb[all_idx_sorted]
below_min_idx = (conf < pos_threshould)
class_id[below_min_idx] = -1
conf[below_min_idx] = 1 - conf[below_min_idx]
pred_info = torch.cat((class_id.unsqueeze(1),
conf.unsqueeze(1),
predicted_bb), dim=1)
out.append(pred_info)
return torch.stack(out)
5. 多尺度目标检测
5.1 多尺度锚框
就是我们可以通过不同的比例来对同样的图像生成 不同大小的锚框
- 代码
def display_anchors(fmap_w, fmap_h, s):
"""
function : 根据指定的高fmap_h,宽fmap_w,和比例s 来生成不同的锚框,
因为锚框中的(x,y)轴坐标值已经被处以特征图fmap的宽度和高度,因此这些值
介于0和1之间,表示特征图中锚框的相对位置。所以为了还原,我们需要乘以
相对应的w,h
:param fmap_w: 宽
:param fmap_h: 高
:param s: 比例大小
:return: 显示锚框
"""
# 设置画布大小
d2l.set_figsize()
# 全为 0 的张量,fmap = (x,y,f,w)
fmap = torch.zeros((1, 10, fmap_h, fmap_w))
# 生成不同尺寸的锚框
anchors = d2l.multibox_prior(fmap, sizes=s, ratios=[1, 2, 0.5])
bbox_scale = torch.tensor((w, h, w, h))
d2l.show_bboxes(d2l.plt.imshow(img).axes,
anchors[0] * bbox_scale)
5.2 多尺度检测
我们可以利用深层神经网络在多个层次上对图像进行分层表示,从而实现多尺度目标检测
6. 目标检测数据集
6.1 数据集预处理思路
- 下载数据集
- 读取数据集的图像和标签
- 将(features,labels)变成 dataset 一对对的
- 将 dataset 变成批量的dataloader,得到 train_iter,val_iter
- 批量读取显示
6.2 源码
# 1. 导入相关数据库
import matplotlib.pyplot as plt
import os
import pandas as pd
import torch
import torchvision
from d2l import torch as d2l
# 2. 定义数据地址
d2l.DATA_HUB['banana-detection'] = (
d2l.DATA_URL + 'banana-detection.zip',
'5de26c8fce5ccdea9f91267273464dc968d20d72')
# 3. 读取香蕉检测数据集中的图像和标签
def read_data_bananas(is_train=True):
"""读取香蕉检测数据集中的图像和标签"""
# data_dir ='..\\data\\banana-detection
data_dir = d2l.download_extract('banana-detection')
# 地址目录
csv_fname = os.path.join(data_dir, 'bananas_train' if is_train
else 'bananas_val', 'label.csv')
# 读取 csv文件
# 原始的csv_data形状:[1000,6]:[img_name,label,xmin,ymin xmax ymax]
csv_data = pd.read_csv(csv_fname)
# 将 表格数据的行序列用 img_name 代替
csv_data = csv_data.set_index('img_name')# 形状:[1000,5]:(img_name)[label,xmin,ymin,xmax,ymax]
# 创建两个空列表 images,targets
images, targets = [], []
# 逐行迭代数据
# img_name:str '0.png';
# target:series:[0-label,0-xmin,0-ymin,0-xmax,0-ymax]
# targets : (1000,5);每行为:[label,xmin,ymin,xmax,ymax]
# images : (1000,3):每行为:[channels,height,width]
for img_name, target in csv_data.iterrows():
images.append(torchvision.io.read_image(
os.path.join(data_dir, 'bananas_train' if is_train else
'bananas_val', 'images', f'{img_name}')))
# 这里的target包含(类别,左上角x,左上角y,右下角x,右下角y),
# 其中所有图像都具有相同的香蕉类(索引为0)
targets.append(list(target))
# images = Tensor[image_channels, image_height, image_width]
# unsqueeze 在第 1 维增加一个大小为 1 的维度,并归一化处理
return images, torch.tensor(targets).unsqueeze(1) / 256
#@save
# 4. 自定义香蕉数据集,需满足三个条件
# 1) 初始化函数: __init__
# 2) 根据 index 获取 label 函数: __getitem__
# 3) 特征的长度函数 : __len__
class BananasDataset(torch.utils.data.Dataset):
"""一个用于加载香蕉检测数据集的自定义数据集"""
def __init__(self, is_train):
self.features, self.labels = read_data_bananas(is_train)
print('read ' + str(len(self.features)) + (f' training examples' if
is_train else f' validation examples'))
def __getitem__(self, idx):
return (self.features[idx].float(), self.labels[idx])
def __len__(self):
return len(self.features)
# 5. 加载香蕉检测数据集,将得到的dataset转换成 DataLoader 类型,
# 生成训练迭代器train_iter,验证迭代器val_iter ,方便后期训练
def load_data_bananas(batch_size):
"""加载香蕉检测数据集"""
# 训练集需要打乱来提高网络的鲁棒性,所以 shuffle=True
# 验证集则不需要,所以 shuffle=False
train_iter = torch.utils.data.DataLoader(BananasDataset(is_train=True),
batch_size, shuffle=True)
val_iter = torch.utils.data.DataLoader(BananasDataset(is_train=False),
batch_size)
return train_iter, val_iter
# 6. 定义批量大小batch_size=32,边缘框大小edge_size=256
batch_size, edge_size = 32, 256
# 7. 加载训练集迭代器 train_iter,验证集不需要
train_iter, _ = load_data_bananas(batch_size)
# features:[1000]
# labels = tensor:(1000,1,5)
# 8. 将训练集中的第一个batch拿出来
batch = next(iter(train_iter))
print(batch[0].shape, batch[1].shape)
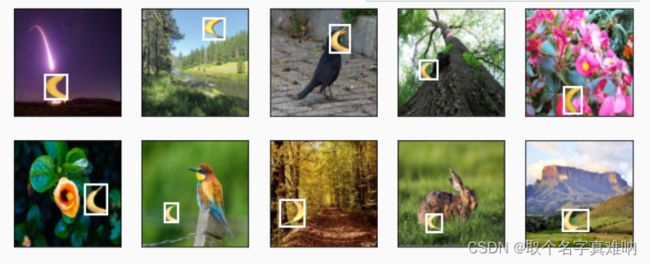
# 9. 将第0个批量中的前10个训练集加载进来,
# permute 调换张量的顺序为 (0,2,3,1)后再除以255后使得张量值在[0,1]之间
imgs = (batch[0][0:10].permute(0, 2, 3, 1)) / 255
# 10.设置轴
axes = d2l.show_images(imgs, 2, 5, scale=2)
# 11. 将前10张图片含边缘框显示出来
for ax, label in zip(axes, batch[1][0:10]):
d2l.show_bboxes(ax, [label[0][1:5] * edge_size], colors=['w'])
plt.show()
6.3 结果