自动驾驶-基于Frenet坐标的路径规划
目录
1.什么是Frenet坐标系
2.Frenet坐标与笛卡尔坐标转化
3.五次多项式系数推导
4.基于Frenet的横向路径规划
5.基于Frenet的纵向路径规划
6.典型的路径选择方法
7.参考文献
1.什么是Frenet坐标系

我们知道在笛卡尔坐标系下,表示一个点,用(x,y),但是在自动驾驶过程中,还是希望以驾驶员视角,同时为了计算简化,我们希望车道线为参考线,相对自车,来构建一个坐标系,这就是Frenet坐标系。
如上图所示,车辆的位置在笛卡尔坐标系下坐标为(x,y),那么在Fenet表示该位置为(s,d)。
这里的d表示车辆位置到参考线的法相距离,s表示起点到参考点的距离(注意这里是曲线长度)。
2.Frenet坐标与笛卡尔坐标转化

首先明确转换目标为:![]()
如图所示,在某个位置,车的位置为(s,d)
其中向量 ![]() = (cosθr,sinθr)
= (cosθr,sinθr) ![]() = (-sinθr,cosθr)
= (-sinθr,cosθr) ![]() = (-sinθx,cosθx)
= (-sinθx,cosθx) ![]() = (cosθx,sinθx)
= (cosθx,sinθx)
![]()
可以进一步推导为
![]() (公式1)
(公式1)
其中的![]() 就是参考点在笛卡尔坐标系下的坐标,因此根据d(s(t))很容易得到当前车辆坐标。
就是参考点在笛卡尔坐标系下的坐标,因此根据d(s(t))很容易得到当前车辆坐标。
![]()
通过该式对时间t求导
![]()
其中
![]()
![]()
对d进一步求导得:

推得:![]()
可得: (公式2)
(公式2)
![]() 由该式对事件t求导
由该式对事件t求导
![]()
![]()

 (公式3)
(公式3)
![]() (公式4) 一般直接对速度事件求导,即可得到加速度
(公式4) 一般直接对速度事件求导,即可得到加速度
![]() (公式5)一般直接通过三帧转为全局坐标,然后三点确定一个圆,即可得到曲率半径
(公式5)一般直接通过三帧转为全局坐标,然后三点确定一个圆,即可得到曲率半径
3.五次多项式系数推导
为了保证舒适度,一般采用五次多项式来保证横纵向的加速度连续,因此有:
![]() (其中的f(t) 既可以表示s(t)或d(t))
(其中的f(t) 既可以表示s(t)或d(t))
该多项式有6个未知参数,因此要想确定一个五次多项式,必须知道起点的(位置-速度-加速度) 以及结束点的(位置-速度-加速度)
起点位置:![]()
起点速度:![]()
起点加速度:![]()
结束点位置:![]()
结束点速度:![]()
结束点加速度:![]()
转化为矩阵可得:

设定:

可得: ![]() 因此求M的逆,即可求得多项式的系数。
因此求M的逆,即可求得多项式的系数。
4.基于Frenet的横向路径规划
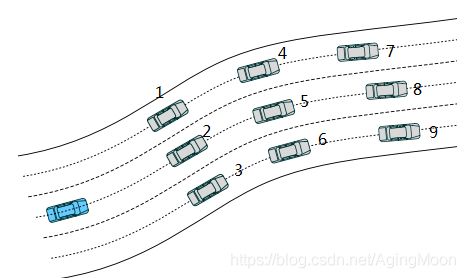
从第三章可知,关于横向路径规划生成轨迹,最核心的是规划起始点以及结束点的位置-速度-加速度。
一般起始点为上一时刻的结束点,因此主要是选择结束点的位置-速度-加速度。
如图所示,结束点有9个备选位置,假设道路宽度为3.6m,右边移动为正,左边移动为负,则九个横向位置为(-3.6m 0 3.6m -3.6m 0 3.6m -3.6m 0 3.6m)
当然可以进一步定义末状态的预期速度和加速度。
为了获取更多的备选轨迹,我们一般会针对末状态的位置或时间,进行均匀采样(如时间选择 T+0.1,T+0.2 ...等,位置可以选择更细颗粒度),从而我们可以得到一束横向运动轨迹。

5.基于Frenet的纵向路径规划
同横向路径规划,纵向路径规划主要也是选择末状态,来确定轨迹。那么根据场景不同,对末状态的选择也有一些不同,如下表所示:
| 场景 | 末状态位置选择 | 末状态速度选择 | 末状态加速度选择 |
| 跟车场景 | 跟车位置-安全距离 | 跟车车速 | 跟车加速度 |
| 定速巡航 | 设定速度 | 限定的加速度 | 限定的加加速度 |
| 停车场景 | 目标停车位置 | 0 | 0 |
| 加塞场景 | 前后车中间安全位置 | 合理的跟车速度 | 合理的跟车加速度 |
根据不同的场景设定不同的目标点,最终通过均匀撒点,可以得到一系列纵向轨迹

虽然横纵向可以单独进行路径规划,但是在某一时刻,横纵向必须是统一的,因此针对轨迹进行一定合成,选出某一时刻既满足横向又满足纵向的轨迹。
因此需要根据时间,选出同时满足横纵向的轨迹。
6.典型的路径选择方法
根据第五和第六章,横纵向,都会基于Frenet坐标生成很多条备选轨迹,最终作为车辆参考执行的轨迹应只有一条。
那么如何选择一条最符合期望的轨迹呢?一般从以下几个维度去选择。
1.安全性,即横向与纵向 都不会与道路中的静态和动态障碍物碰撞,也包括不能行驶到车道外;
2.舒适性,一般影响舒适性的参数为横纵向的加速度,因此通过限制加速度或加加速度,可以达到舒适性目的;
3.效率,如轨迹运行时间,车速,横向位移,纵向位移等均可以作为参考因素;
4.可行性,规划出的轨迹满足车辆运动学和动力学的约束。
一般做法为,根据每项指标,设计权重(一般权重是可调参数),通过一个损耗函数 fcost = W1 * F1 + W2*F2....
其中W1为对应的权重,F1为相应的影响参数。 一般为了进一步细化,在不同的场景可以选择fcost函数。
7.参考文献
《智能车轨迹规划与算法研究》
《自动驾驶-决策与控制》