自动驾驶中的欧拉角-四元数-坐标变换
前言
在对角度的描述中,有欧拉角,四元数两中描述方式,其中欧拉角最直观,但是不具备唯一性,即按照不同的旋转方式得到的欧拉角表示结果是不一样的。但四元数的表达方式是唯一的,所以针对不同的设备,如果用欧拉角表示角度,一定得确定是用的哪种旋转顺序,目前使用最多的是ZYX,即先旋转Z轴,再旋转Y轴,再旋转X轴。但是百度apollo用的是ZXY坐标系,这里要特别注意。
一、apollo 中的欧拉角转四元数
ZXY 旋转顺序
首先明确一点不同的旋转顺序,欧拉角和四元数之间转换的公式是不一样的,以下推导使用的旋转顺序为: Z,X,Y;
X :pitch;
Y: roll;
Z: yaw;
这里注意,绕X 轴旋转为pitch, 绕Y轴旋转为roll,与常用的坐标系有点不一样,这里要特别注意。
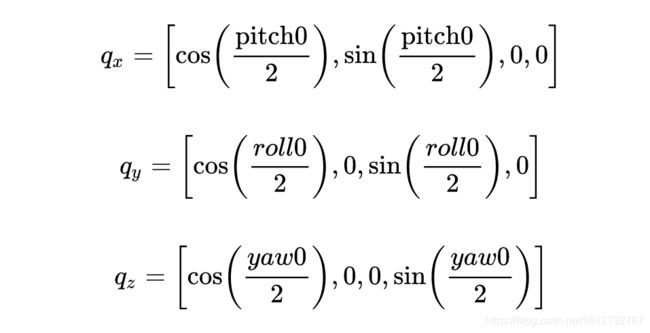
1.1.欧拉角转四元数
绕 [公式] 轴旋转角度为,绕 [公式] 轴旋转角度为,绕 [公式] 轴旋转角度为,把这三个角轴转换为四元数得到以下公式:
 四元数相乘得到:
四元数相乘得到:
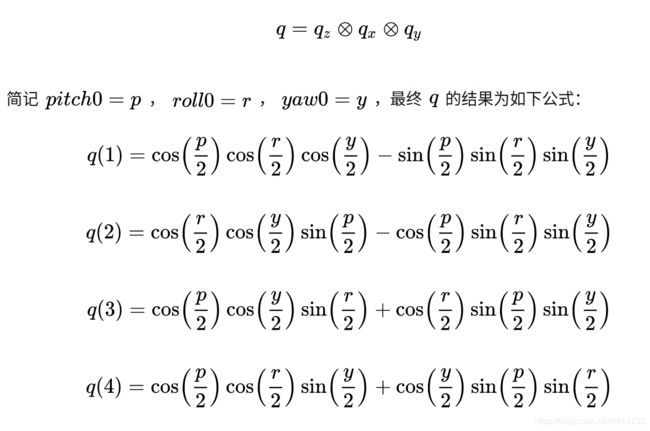
其中
q(1):w,
q(2):x,
q(3):y,
q(4): z
1.2,四元数转欧拉角
四元数转欧拉角:
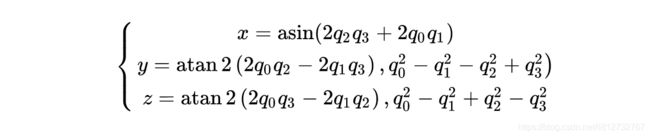 其中x:滚转角roll,y:俯仰角pitch,z:偏航角yaw
其中x:滚转角roll,y:俯仰角pitch,z:偏航角yaw
二、 ZYX顺序情况
以下推导使用的旋转顺序为: Z,X,Y;
X :roll;
Y: pitch;
Z: yaw;
2.1 分别绕x,y,z旋转
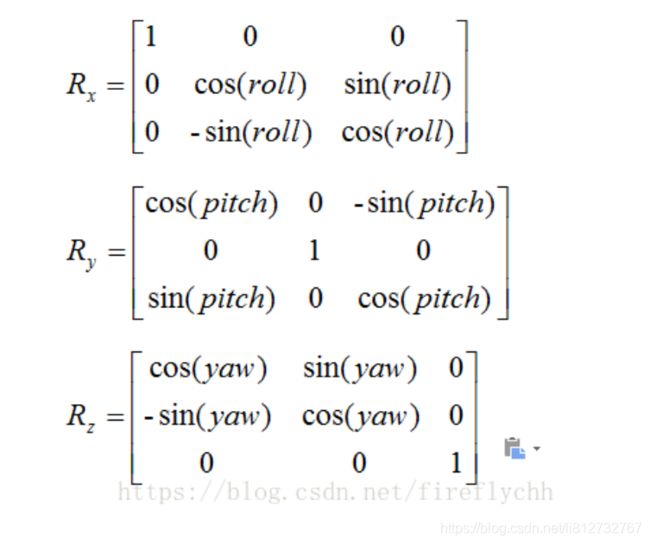
2.2 欧拉角转化公式ZYX:旋转矩阵
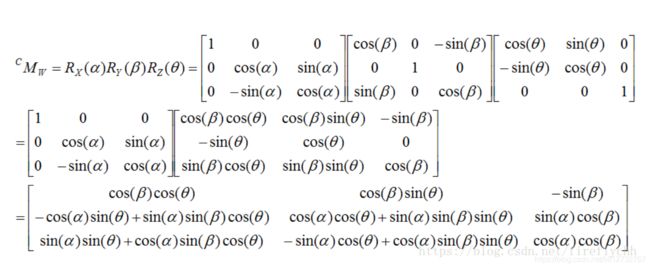 此时,该旋转矩阵表示全局坐标(大地)到局部坐标(车辆),
此时,该旋转矩阵表示全局坐标(大地)到局部坐标(车辆),
如roll ,pitch ,yaw :表示当前车辆在大地坐标下绕x,y,z旋转的角度;
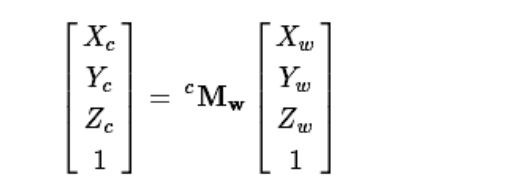
vector[车辆坐标系的x,y,z] = cMw * vector[全局坐标系下的x,y,z];
例如:
世界坐标系下的坐标(Xw,Yw,Zw)转换到相机坐标系下(Xc,Yc,Zc)。
将旋转矩阵取逆即可得到 相机坐标系 到 世界坐标系下的坐标。
三、ZXY代码直接计算
ZXY全局到局部:
X:roll;
Y:pitch;
z: yaw
double x1 = cos(yaw) * acc_x - sin(yaw) * acc_y;
double y1 = sin(yaw) * acc_x + cos(yaw) * acc_y;
double z1 = acc_z;
double x2 = x1;
double y2 = cos(roll) * y1 - sin(roll) * z1;
double z2 = sin(roll) * y1 + cos(roll) * z1;
acc_x = cos(pitch) * x2 + sin(pitch) * z2;
acc_y = y2;
acc_z = -sin(pitch) * x2 + cos(pitch) * z2;
// AERROR << "out=" << acc_x << "," << acc_y << "," << acc_z;
Eigen::Vector3d vec(acc_x, acc_y, acc_z);
ZXY局部到全局:
double x2 = cos(pitch) * acc_x + sin(pitch) * acc_z;
double y2 = acc_y;
double z2 = -sin(pitch) * acc_x + cos(pitch) * acc_z;
double x1 = x2;
double y1 = cos(roll) * y2 - sin(roll) * z2;
double z1 = sin(roll) * y2 + cos(roll) * z2;
acc_x = cos(yaw) * x1 - sin(yaw) * y1;
acc_y = sin(yaw) * x1 + cos(yaw) * y1;
acc_z = z1;
四、ZXY 使用Eigen函数方法
X:roll;
Y:pitch;
z: yaw
//欧拉角转四元数
Eigen::Quaterniond tmp_q =
Eigen::AngleAxisd(yaw_t, Eigen::Vector3d::UnitZ()) *
Eigen::AngleAxisd(roll_t, Eigen::Vector3d::UnitX()) *
Eigen::AngleAxisd(pitch_t, Eigen::Vector3d::UnitY());
// AERROR << "Eigen: " << tmp_q.x() << "," << tmp_q.y() << "," << tmp_q.z()
// << "," << tmp_q.w();
Eigen::Matrix3d rotation_mat = Eigen::Matrix3d::Identity();
//四元数转旋转矩阵
rotation_mat = tmp_q.toRotationMatrix();
//局部到全局
Vector3d vec0 = rotation_mat * orig;
AERROR << "Eigen= " << vec0[0] << "," << vec0[1] << "," << vec0[2];
//全局到局部
Vector3d vec1 = rotation_mat.inverse() * orig;
AERROR << "Eigen= " << vec1[0] << "," << vec1[1] << "," << vec1[2];
//旋转矩阵按照ZXY方式得到欧拉角
Vector3d vec_rpy = rotation_mat.eulerAngles(2, 0, 1); //ZXY
// AERROR << "ypr=" << vec_rpy[0] << "," << vec_rpy[1] << "," << vec_rpy[2];
说明:原创文章,转载请注明出处