OpenCV 手势识别实现物体虚拟拖放
本文主要基于 OpenCV 和 MediaPipe 实现物体的虚拟拖放,最终效果如下:
OpenCV 实现虚拟方块拖放
主要分为下面几个步骤
- 利用 opencv 读取摄像头视频
- 利用 mediaPipe 获取手掌关键点位置
- 定义拖放手势:主要是根据食指和中指的距离远近来决定是否拖放
- 更新方块,画出图像位置
手势检测
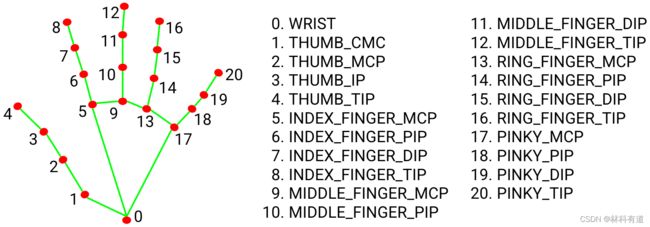
手势检测我们主要是用 MediaPipe 中的手势检测,其输出为20个关键点的位置坐标(x, y, z),输出关键点信息如下图:
代码如下:
# handTrackingModule.py
import cv2
import mediapipe as mp
import math
from mediapipe.python.solutions.drawing_utils import DrawingSpec
class HandDetector:
def __init__(self, static_image_mode=False, maxHands=2, detectionCon=0.5, minTrackCon=0.5):
"""
:param static_image_mode: 静态模式检测会慢一些
:param maxHands: 最大手检测数量
:param detectionCon: 最小检测阈值
:param minTrackCon: 最小跟踪阈值
""" self.static_image_mode = static_image_mode
self.maxHands = maxHands
self.detectionCon = detectionCon
self.minTrackCon = minTrackCon
self.mpHands = mp.solutions.hands
self.hands = self.mpHands.Hands(static_image_mode=self.static_image_mode, max_num_hands=self.maxHands,
min_detection_confidence=self.detectionCon,
min_tracking_confidence=self.minTrackCon)
self.mpDraw = mp.solutions.drawing_utils
self.tipIds = [4, 8, 12, 16, 20] # 指尖关键点, 分别是大拇指到小指
self.fingers = []
self.lmList = []
self.results = None
def findHands(self, img, draw=True, flip_type=False):
"""
手部检测
""" img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
self.results = self.hands.process(img_rgb)
all_hands = []
h, w, c = img.shape
if self.results.multi_hand_landmarks:
for handType, handLms in zip(self.results.multi_handedness, self.results.multi_hand_landmarks):
my_hand = {}
mylmList = []
xList = []
yList = []
#获取关键点坐标
for id, lm in enumerate(handLms.landmark):
px, py, pz = int(lm.x * w), int(lm.y * h), int(lm.z * w)
mylmList.append([px, py, pz])
xList.append(px)
yList.append(py)
## 获取手部矩形框
xmin, xmax = min(xList), max(xList)
ymin, ymax = min(yList), max(yList)
boxW, boxH = xmax - xmin, ymax - ymin
bbox = xmin, ymin, boxW, boxH
cx, cy = bbox[0] + (bbox[2] // 2), \
bbox[1] + (bbox[3] // 2)
my_hand["lmList"] = mylmList
my_hand["bbox"] = bbox
my_hand["center"] = (cx, cy)
# 判断左右手
if flip_type:
if handType.classification[0].label == "Right":
my_hand["type"] = "Left"
else:
my_hand["type"] = "Right"
else:
my_hand["type"] = handType.classification[0].label
all_hands.append(my_hand)
if draw:
self.mpDraw.draw_landmarks(img, handLms,
self.mpHands.HAND_CONNECTIONS,
connection_drawing_spec=DrawingSpec(color=(255, 255, 0)))
cv2.rectangle(img, (bbox[0] - 20, bbox[1] - 20),
(bbox[0] + bbox[2] + 20, bbox[1] + bbox[3] + 20),
(255, 0, 255), 2)
cv2.putText(img, my_hand["type"], (bbox[0] - 30, bbox[1] - 30), cv2.FONT_HERSHEY_PLAIN,
2, (255, 0, 255), 2)
if draw:
return all_hands, img
else:
return all_hands, None
def findDistance(self, p1, p2, img=None):
"""
求两个关键点的距离
"""
x1, y1 = p1[0], p1[1]
x2, y2 = p2[0], p2[1]
cx, cy = (x1 + x2) // 2, (y1 + y2) // 2
length = math.hypot(x2 - x1, y2 - y1)
info = (x1, y1, x2, y2, cx, cy)
if img is not None:
cv2.circle(img, (x1, y1), 15, (255, 0, 255), cv2.FILLED)
cv2.circle(img, (x2, y2), 15, (255, 0, 255), cv2.FILLED)
cv2.line(img, (x1, y1), (x2, y2), (255, 0, 255), 3)
cv2.circle(img, (cx, cy), 15, (255, 0, 255), cv2.FILLED)
return length, info, img
else:
return length, info, None
实现方块拖放
import cv2
from handTrackingModule import HandDetector
import numpy as np
import time
# 打开摄像头
cap = cv2.VideoCapture(2)
cap.set(3, 1280)
cap.set(4, 720)
colorR = (255, 0, 255)
colorB = (255, 0, 0)
detector = HandDetector(detectionCon=0.8)
# 定义方块类
class DragRect():
def __init__(self, posCenter, size=[150, 150]):
self.posCenter = posCenter
self.size = size
self.color = colorR
def update(self, cursor, hit1 = True):
cx, cy = self.posCenter[0], self.posCenter[1]
w, h = self.size
# 如果关键点在方块内部,锁定方块
if cx - w // 2 < cursor[0] < cx + w // 2 and cy - h // 2 < cursor[1] < cy + h // 2:
self.posCenter = cursor
self.color = colorB
else:
self.color = colorR
# 画出方块
rectList = []
for x in range(5):
rectList.append(DragRect([x * 250 + 150, 150]))
prev_time = time.time()
while True:
success, img = cap.read()
img = cv2.flip(img, 1)
lmList, img = detector.findHands(img)
# 检测是否有手
nums = len(lmList)
if nums > 0:
lmList_1 = lmList[0]['lmList']
# 食指和中指的距离
dist, _, _ = detector.findDistance(lmList_1[8], lmList_1[12], img)
if dist < 50:
for rect in rectList:
rect.update(lmList_1[8])
else:
for rect in rectList:
rect.color = colorR
imgNew = np.zeros_like(img, np.uint8)
for rect in rectList:
cx, cy = rect.posCenter[0], rect.posCenter[1]
w, h = rect.size
color = rect.color
cv2.rectangle(imgNew, (cx - w // 2, cy - h // 2),
(cx + w // 2, cy + h // 2), color, cv2.FILLED)
out = img.copy()
alpha = 0.08
mask = imgNew.astype(bool)
out[mask] = cv2.addWeighted(img, alpha, imgNew, 1 - alpha, 0)[mask]
current_time = time.time()
fps = 1 / (current_time - prev_time)
prev_time = current_time
cv2.putText(out, f'FPS: {int(fps)}', (20, 70), cv2.FONT_HERSHEY_PLAIN,
3, (0, 255, 0), 3)
cv2.imshow("hand detect", out)
cv2.waitKey(1)