【自动驾驶】ROS机器人操作系统总结
CSDN话题挑战赛第1期
活动详情地址:https://marketing.csdn.net/p/bb5081d88a77db8d6ef45bb7b6ef3d7f
参赛话题:自动驾驶技术学习记录
话题描述:自动驾驶是当前最火热的技术之一,吸引了无数的开发者与学习者融入其中。然而,自动驾驶技术是系统硬件平台与人工智能、物联网、大数据、云计算等新一代信息技术深度融合的产物,具有知识新、内容杂、难度深、缺少系统教程等特点,让许多开发者眼花缭乱。
本话题通过记录分享自动驾驶相关技术,为大家提供相互学习与交流的平台。话题分享与讨论的技术点包括不限于:自动驾驶算法、自动驾驶系统基础架构、智能驾驶交互技术、虚拟仿真、自动化测试、无人系统与车辆平台、自动驾驶计算平台与传感器等。
文章目录
-
- 前言
- 技术学习记录
-
- 1、ROS是什么?
-
- (1)通信机制
- (2)开发工具
- (3)应用功能
- (4)生态系统
- 2、ROS中核心概念
-
- (1)节点与节点管理器
- (2)通信机制
- (3)参数服务器
- (4)文件系统
- 3、使用方法
-
- (1)话题发布
- (2)话题订阅
- (3)服务客户端
- (4)服务服务端
- 优质资料推荐
- 总结
前言
ROS(机器人操作系统)是早期自动驾驶系统的原型,也是目前使用最广泛的开源机器人操作系统之一。目前,国际知名的自动驾驶开源系统Autoware和Apollo都与ROS系统有着一定的渊源。Autoware是基于ROS架构开发的,百度Apollo系统的原型也是基于ROS系统的。虽然,ROS在大数据传输、实时性和稳定性等方面仍有不足,但ROS是自动驾驶算法在研发测试阶段重要的工具,也是自动驾驶从业者必备的技能。ROS学习者可参考ROS专栏。
技术学习记录
1、ROS是什么?
ROS=通信机制+开发工具+应用功能+生态系统
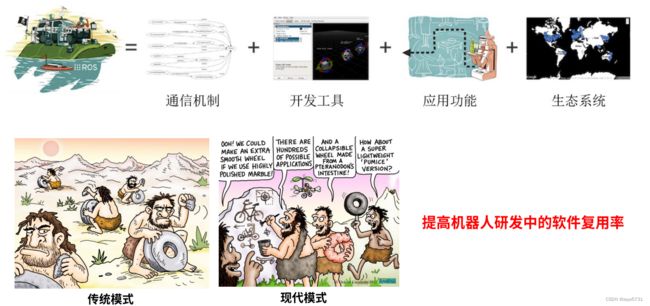
(1)通信机制
ROS提供了一种松耦合分布式通信机制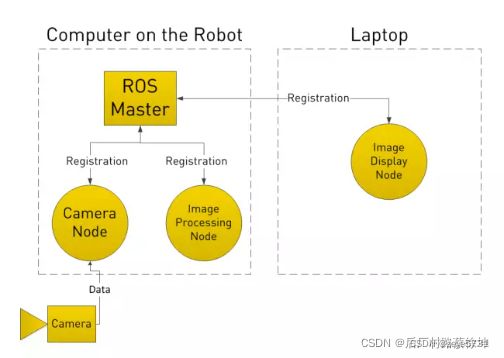
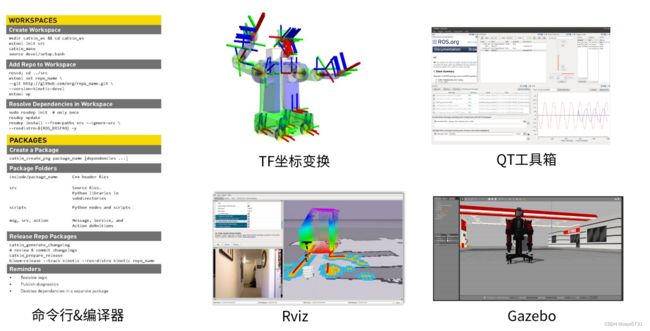
(2)开发工具
ROS提供了大量的开发工具组合用以配置、启动、自检、调试、可视化、登录、测试、终止分布式计算系统;
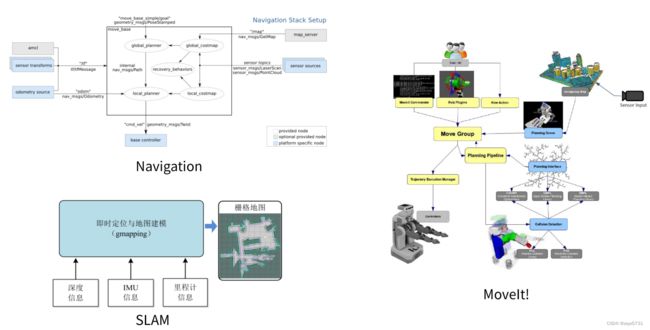
(3)应用功能
ROS提供控制,规划,预测,定位操纵等功能
(4)生态系统
ROS的支持与发展依托着一个强大的社区。ros.org尤其关注兼容性和支持文档,提供了一套“一站式”的方案使得用户得以搜索并学习来自全球开发者数以千计的ROS程序包。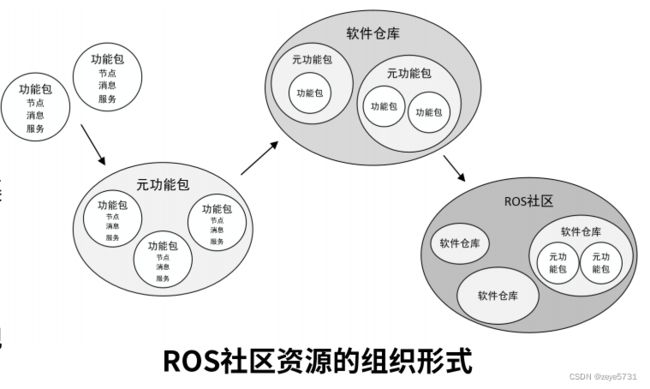
2、ROS中核心概念
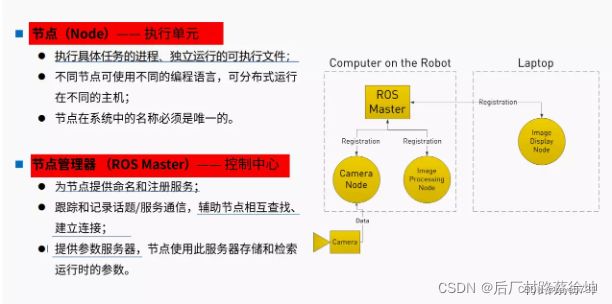
(1)节点与节点管理器
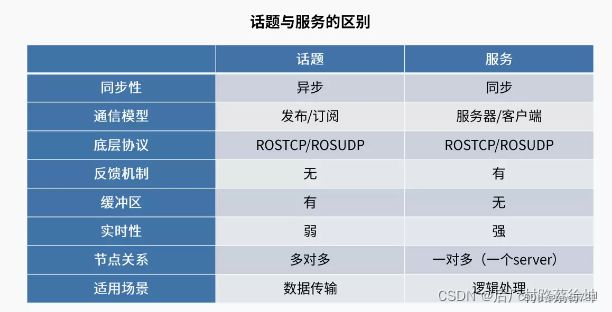
(2)通信机制
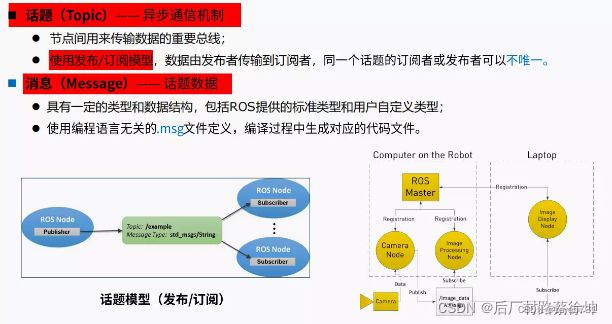
ROS中具有两种通信机制,分别为:话题通信和服务通信
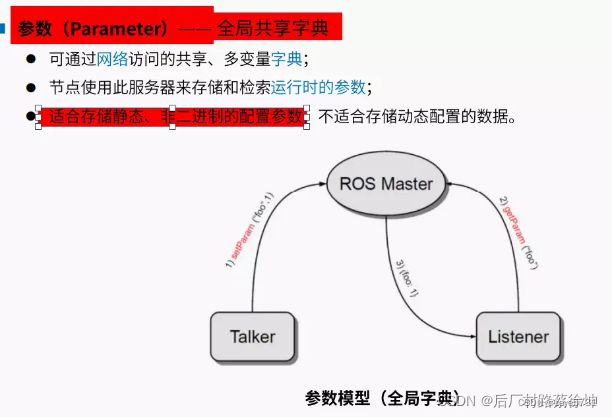
(3)参数服务器
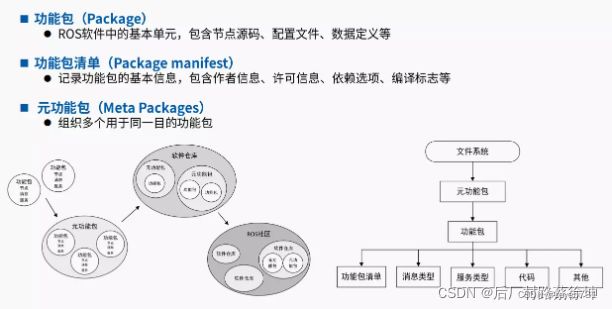
(4)文件系统
3、使用方法
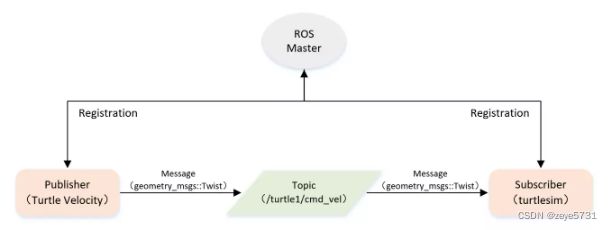
(1)话题发布
①话题模型
②创建发布者节点
$ cd ~/catkin_ws/src
$ catkin_create_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim
- 初始化
- 向ROS Master注册节点信息,包括:话题、消息
- 实例化消息并循环发出
#include③编译功能包
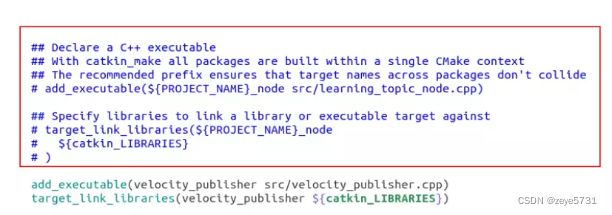
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher $[catkin_LIBRARIES])
④运行节点
$ cd ~/catkin_ws
$ catkin_make
$ source devel/setup.bash
$ roscore
$ rosrun turtlesim turtlesim_node
$ rosrun learning_topic velocity_publisher
(2)话题订阅
①创建订阅节点
- 初始化ROS节点
- 订阅需要的话题
- 循环等待消息进入回调函数
- 回调函数消息处理
#include②编译订阅节点
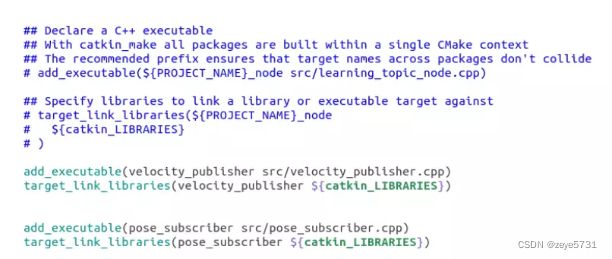
add_executable(pose_subscriber src/pose_subscriber.cpp)
target_link_libraries(pose_subscriber $[catkin_LIBRARIES])
③运行节点
$ cd ~/catkin_ws
$ catkin_make
$ source devel/setup.bash
$ roscore
$ rosrun turtlesim turtlesim_node
$ rosrun learning_topic velocity_publisher
$ rosrun learning_topic pose_subscriber
(3)服务客户端
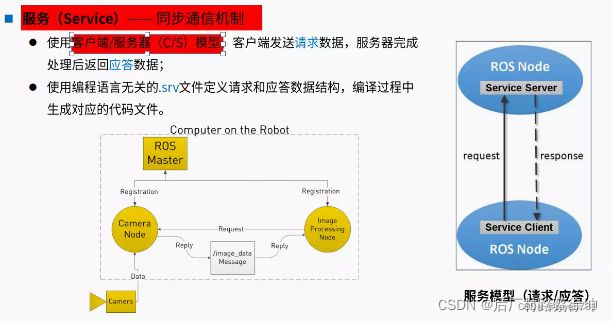
①服务通信模型

②ROS客户端编程
创建功能包:
cd ~/catkin_ws/src
catkin_create_pkglearning service roscpp rospy std_msgs geometry_msgs turtlesim
客户端代码:
- ROS节点初始化
- 搜索服务,向ROS MASTER注册连接服务
- 请求服务
#include (4)服务服务端
- 初始化节点
- 注册服务器
- 注册话题发布节点(Server提供的服务)
- 主函数循环:监听回调函数、发布话题
#include 优质资料推荐
1、b站视频教程《古月ROS入门21讲》
2、b站视频教程《奥特学院ROS理论与实践》
3、书籍教程《ROS机器人开发实践》胡春旭
4、网页教程ROSwiki
总结
本文主要对ROS的基础知识进行了大致的总结,因篇幅有限,只介绍了ROS一小部分内容。欲了解详细知识与笔记,请参考:ROS学习专栏
CSDN话题挑战赛第1期
活动详情地址:https://marketing.csdn.net/p/bb5081d88a77db8d6ef45bb7b6ef3d7f