【自动驾驶】全局路径规划算法——Dijkstra算法
文章目录
- 参考资料
- 1. 基本概念
-
- 1.1 算法简介
- 1.2 算法思想
- 1.3 算法图解
- 1.4 最短路径的最优子结构性质
- 2. python代码实现
参考资料
- 路径规划与轨迹跟踪系列算法学习
- 最短路径算法-迪杰斯特拉(Dijkstra)算法
- 迪杰斯特拉dijkstra算法的python实现
- Python实现迪杰斯特拉算法
1. 基本概念
1.1 算法简介
迪杰斯特拉算法(Dijkstra)是由荷兰计算机科学家狄克斯特拉于1959 年提出的,因此又叫狄克斯特拉算法。是从一个节点遍历其余各节点的最短路径算法,解决的是有权图中最短路径问题。
它的主要特点是以起始点为中心向外层层扩展(广度优先遍历思想),直到扩展到终点为止。
1.2 算法思想
- 设G=(V,E)是一个带权图,V为节点集合。通过Dijkstra计算图G中的最短路径时,需要指定一个起点(假设为D,即从顶点D开始计算)。
- 此外,引进两个数组S和U。初始时S中只有一个起点,S的作用是记录已求出最短路径的节点(以及相应的最短路径长度);而U则是记录还未确定最短路径的节点(以及该节点到起点D的距离)。
- 初始时,数组S中只有起点D,而数组U中是除起点D之外的节点集合,并且数组U中记录各节点到起点D的距离。如果节点与起点D不相邻,距离设为无穷大。
- 然后,从数组U中找出路径最短的节点K,并将其加入到数组S中;同时,从数组U中移除节点K。接着,更新数组U中的各节点到起点D的距离。
- 重复第4步操作,直到遍历完所有节点。
1.3 算法图解
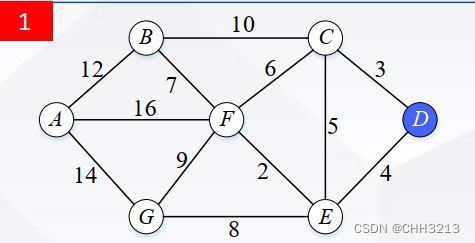
以上图为例,设节点D为起点。
-
初始时,S只包含起点D;U包含除 D外的其他节点,且U中节点的距离为起点D到该节点的距离,如果该节点与起点D不相邻,距离为无穷大。

-
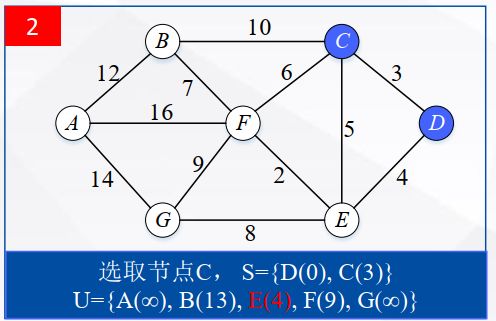
从U中选出距离最短的节点C,并将节点C加入到S中;同时,从U中移除节点C。然后,更新U中各个节点到起点D的距离。
之所以更新U中节点的距离,是由于确定了C是求出最短路径过程中的节点,从而可以利用C来更新其它节点的距离;因为因为起点D到节点v的距离(D,v)可能大于(D,C)+(C,v)的距离。
接下来重复步骤1,2即可。
-
选取节点E,将E加入到S中,同时更新U中节点的距离。以节点F为例,之前F到D的距离为9;但是将E加入到S之后,F到D的距离为6=(F,E)+(E,D)。

-
将节点F加入到S中,同时更新U。

-
将节点G加入到S中,同时更新U。

-
将节点B加入到S中,同时更新U。

-
将节点A加入到S中,同时更新U。

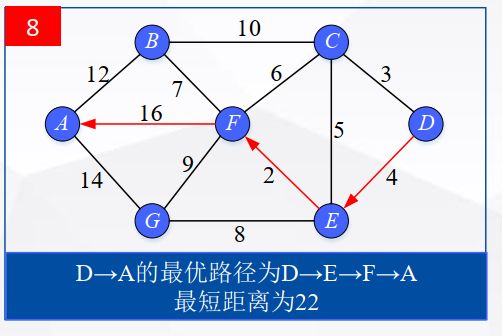
此时,起点D到各个节点的最短距离就计算出来了:A(22) B(13) C(3) D(0) E(4) F(6) G(12)。 -
最后
D->A的最优路径为D->E->F->A
1.4 最短路径的最优子结构性质
如果 P ( i , j ) = { V i … V k … V m … V j } P(i,j)=\{V_i…V_k…V_m…V_j\} P(i,j)={Vi…Vk…Vm…Vj}是从顶点 i i i到 j j j的最短路径, k k k和 m m m是这条路径上的一个中间顶点,那么 P ( k , m ) P(k,m) P(k,m)必定是从 k k k到 m m m的最短径。
证明:
假设 P ( i , j ) = { V i … V k … V m … V j } P(i,j)=\{V_i…V_k…V_m…V_j\} P(i,j)={Vi…Vk…Vm…Vj}是从顶点 i i i到 j j j的最短路径,则有 P ( i , j ) = P ( i , k ) + P ( k , m ) + P ( m , j ) P(i,j)=P(i,k)+P(k,m)+P(m,j) P(i,j)=P(i,k)+P(k,m)+P(m,j)。而 P ( k , m ) P(k,m) P(k,m)不是从 k k k到 m m m的最短距离,那么必定存在另一条从 k k k到 m m m的最短路径 P ′ ( k , m ) P'(k,m) P′(k,m),那么 P ( i , j ) = P ( i , k ) + P ′ ( k , m ) + P ( m , j ) < P ( i , j ) P(i,j)=P(i,k)+P'(k,m)+P(m,j)
2. python代码实现
参考自资料。
def dijkstra(matrix, source):
"""迪杰斯特拉算法实现
Args:
matrix (_type_): 用邻接矩阵表示带权图
source (_type_): 起点
Returns:
_type_: 最短路径的节点集合,最短路径的节点的最短距离,每个节点到起点的最短路径
"""
INF = float('inf')
n = len(matrix)
m = len(matrix[0])
assert n == m, "Error, please examine matrix dim"
assert source < n, "Error, start point should be in the range!"
S = [source] # 已找到最短路径的节点集合
U = [v for v in range(n) if v not in S] # 记录还未确定最短路径的节点集合
distance = [INF] * n # source到已找到最短路径的节点的最短距离
distance[source] = 0 # 起点到自己的距离
path_optimal = [[]]*n # source到其他节点的最短路径
path_optimal[source] = [source]
while len(S) < n: # 当已找到最短路径的节点小于n时
min_value = INF
col = -1
row = -1
for s in S: # 以已找到最短路径的节点所在行为搜索对象
for u in U: # 从U中搜索尚未记录的节点
if matrix[s][u] + distance[s] < min_value: # 找出最小值
# 在某行找到最小值要加上source到该行的最短路径
min_value = matrix[s][u] + distance[s]
row = s # 记录所在行列
col = u
if col == -1 or row == -1: # 若没找出最小值且节点还未找完,说明图中存在不连通的节点
break
S.append(col) # 在S中添加已找到的节点
U.remove(col) # 从U中移除已找到的节点
distance[col] = min_value # source到该节点的最短距离即为min_value
path_optimal[col] = path_optimal[row][:] # 复制source到已找到节点的上一节点的路径
path_optimal[col].append(col) # 再其后添加已找到节点即为source到该节点的最短路径
return S, distance, path_optimal
def main():
INF = float('inf')
# 使用邻接矩阵存储图
# A B C D E F G
matrix = [[0, 12, INF, INF, INF, 16, 14],
[12, 0, 10, INF, INF, 7, INF],
[INF, 10, 0, 3, 5, 6, INF],
[INF, INF, 3, 0, 4, INF, INF],
[INF, INF, 5, 4, 0, 2, 8],
[16, 7, 6, INF, 2, 0, 9],
[14, INF, INF, INF, 8, 9, 0]]
S, distance, path_optimal = dijkstra(matrix, 3)
print('S:')
print(S)
print('distance:')
print(distance)
print('path_optimal:')
for p in path_optimal:
print(p)
if __name__ == '__main__':
main()
详细请见github仓库