小车yolo机械臂(八)ros小车和机械臂gazebo仿真,机械臂根据darknet_ros中yolo检测结果来自动运动 python实现
小车yolo机械臂(八)ros小车和机械臂gazebo仿真,机械臂根据darknet_ros中yolo检测结果来自动运动 python实现
- 目录总览
- 项目下载
- arm_car_world.launch中添加darknet_ros
- 创建arm_listener_yolo.py
-
- 创建文件
- 监听yolo的检测结果
- 根据监听结果来控制机械臂
- arm_car_world.launch中添加arm_listener_yolo.py
目录总览
小车yolo机械臂(一)ros下gazebo搭建小车(可键盘控制)安装摄像头仿真 加载yolo检测识别标记物体
小车yolo机械臂(二)机械臂仿真 ros下从xacro模型文件搭建Moveit!+Gazebo仿真系统
小车yolo机械臂(三)ROS消息订阅监听 rospy.Subscriber 订阅监听yolo python实现订阅/darknet_ros/bounding_boxes topic
小车yolo机械臂(四)python ros 和darknet_ros 使用launch文件启动脚本
小车yolo机械臂(五)让小车在命令下运动起来 rostopic pub /cmd_vel geometry_msgs/Twist
小车yolo机械臂(六)ros gazebo 小车摄像头根据darknet_ros中yolo目标检测的信息进行自主运动
小车yolo机械臂(七)小车与机械臂融合,并控制机械臂运动 gazebo control
小车yolo机械臂(八)ros小车和机械臂gazebo仿真,机械臂根据darknet_ros中yolo检测结果来自动运动 python实现
项目下载
这一篇博客,我们要将已经融合的小车和机械臂模型,添加darknet_ros(进行yolo目标检测),让机械臂根据yolo检测结果自动运动。
这篇博客所用到的代码已经上传到github:
项目下载
其中darknet_ros的的权重需要单独下载,其方法在之前的博客说了,ros下gazebo搭建小车(可键盘控制)安装摄像头仿真 加载yolo检测识别标记物体
arm_car_world.launch中添加darknet_ros
arm_car_gazebo/launch/arm_car_gazebo_control.launch中添加如下代码,用于启动darknet_ros
<launch>
<!-- 启动Gazebo -->
<include file="$(find arm_car_gazebo)/launch/arm_car_world.launch" />
<!-- 启动Gazebo controllers -->
<include file="$(find arm_car_gazebo)/launch/arm_car_gazebo_controller.launch" />
<!-- 启动darknet_ros的yolo检测-->
<include file="$(find darknet_ros)/launch/darknet_ros.launch">
</include>
</launch>
这个darknet_ros的导入在前面有博客讲解,链接在此(后面写入)
我们运行下面的的命令:
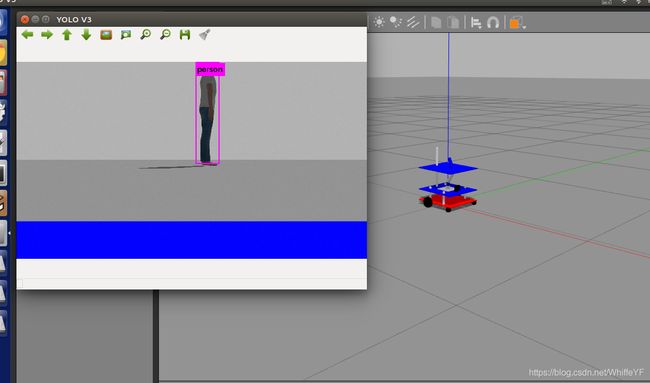
roslaunch arm_car_gazebo arm_car_gazebo_control.launch
可以看到如下的图(人是自己手动添加的)

我们看看这次运行的仿真模型有那些的话题(topic)
输入命令:
rostopic list
我们可以看到输出结果:
/arm/joint1_position_controller/command
/arm/joint2_position_controller/command
/arm/joint3_position_controller/command
/arm/joint_states
/camera/camera_info
/camera/image_raw
/camera/image_raw/compressed
/camera/image_raw/compressed/parameter_descriptions
/camera/image_raw/compressed/parameter_updates
/camera/image_raw/compressedDepth
/camera/image_raw/compressedDepth/parameter_descriptions
/camera/image_raw/compressedDepth/parameter_updates
/camera/image_raw/theora
/camera/image_raw/theora/parameter_descriptions
/camera/image_raw/theora/parameter_updates
/camera/parameter_descriptions
/camera/parameter_updates
/clock
/cmd_vel
/darknet_ros/bounding_boxes
/darknet_ros/check_for_objects/cancel
/darknet_ros/check_for_objects/feedback
/darknet_ros/check_for_objects/goal
/darknet_ros/check_for_objects/result
/darknet_ros/check_for_objects/status
/darknet_ros/detection_image
/darknet_ros/found_object
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/set_link_state
/gazebo/set_model_state
/gazebo_gui/parameter_descriptions
/gazebo_gui/parameter_updates
/joint_states
/odom
/rosout
/rosout_agg
/tf
/tf_static
其中的:
/darknet_ros/bounding_boxes
/darknet_ros/check_for_objects/cancel
/darknet_ros/check_for_objects/feedback
/darknet_ros/check_for_objects/goal
/darknet_ros/check_for_objects/result
/darknet_ros/check_for_objects/status
/darknet_ros/detection_image
/darknet_ros/found_object
就是我们darknet_ros的话题,和之前的博客一样,我们在终端中打印出yolo检测的结果,输入命令:
rostopic echo /darknet_ros/bounding_boxes
结果:
header:
seq: 57
stamp:
secs: 185
nsecs: 860000000
frame_id: "detection"
image_header:
seq: 5346
stamp:
secs: 181
nsecs: 941000000
frame_id: "camera_link"
bounding_boxes:
-
probability: 0.866776227951
xmin: 640
ymin: 56
xmax: 779
ymax: 388
id: 0
Class: "person"
-
probability: 0.82601493597
xmin: 878
ymin: 170
xmax: 927
ymax: 346
id: 0
Class: "person"
我们在看看/darknet_ros/bounding_boxes的信息。输入命令:
rostopic info /darknet_ros/bounding_boxes
结果如下:
Type: darknet_ros_msgs/BoundingBoxes
Publishers:
* /darknet_ros (http://winston-ThinkPad-T450:33187/)
Subscribers:
* /rostopic_8512_1604234684470 (http://winston-ThinkPad-T450:40669/)
可以看出/darknet_ros/bounding_boxes话题的类型为:darknet_ros_msgs/BoundingBoxes,这个在我们的arm_listener_yolo.py文件中会用到。
创建arm_listener_yolo.py
创建文件
在arm_car_gazebo文件下新建scripts文件,用来存放python文件,在scripts下新建python文件:arm_listener_yolo.py
当然,这个新建的python文件也需赋予权限,不然无法执行。
在arm_listener_yolo.py所在目录执行:
chmod +x arm_listener_yolo.py
监听yolo的检测结果
直接上代码:
#!/usr/bin/env python
import rospy
from darknet_ros_msgs.msg import BoundingBoxes
def callback(data):
print data.bounding_boxes[0].Class
def listener():
rospy.init_node('topic_subscriber')
sub = rospy.Subscriber('/darknet_ros/bounding_boxes', BoundingBoxes, callback)
rospy.spin()
if __name__ == '__main__':
listener()
这里的python文件实现了对/darknet_ros/bounding_boxes的监听,并返回yolo的检测结果。
我们开始运行,在仿真程序运行的基础上,我们运行以下命令:
rosrun arm_car_gazebo arm_listener_yolo.py
结果就会出现:
说明我们已经获取到了检测结果!
根据监听结果来控制机械臂
接下来,我们继续修改python文件,使python文件可操控机械臂。
在上一篇博客,已经实现了使用命令来控制机械臂,在终端中执行命令:
rostopic pub /arm/joint2_position_controller/command std_msgs/Float64 1.0
我们现在要把这个操作用python来实现,我们首先输入/arm/joint2_position_controller/command的信息,执行命令:
rostopic info /arm/joint2_position_controller/command
结果如下:
Type: std_msgs/Float64
Publishers: None
Subscribers:
* /gazebo (http://winston-ThinkPad-T450:46703/)
可以看到/arm/joint1_position_controller/command话题(topic)的类型为:std_msgs/Float64
所以python文件这样修改:
#!/usr/bin/env python
import rospy
from darknet_ros_msgs.msg import BoundingBoxes
from std_msgs.msg import Float64
def callback(data):
print data.bounding_boxes[0].Class
if data.bounding_boxes[0].Class == 'person':
pub = rospy.Publisher('/arm/joint2_position_controller/command', Float64, queue_size=10)
pub.publish(1.0)
print "arm jiont2 1.0"
def listener():
rospy.init_node('topic_subscriber')
sub = rospy.Subscriber('/darknet_ros/bounding_boxes', BoundingBoxes, callback)
rospy.spin()
if __name__ == '__main__':
listener()
我们在终端中运行:
rosrun arm_car_gazebo arm_listener_yolo.py
我们需要观察当小车检测到人的时候,机械臂会不会运动起来。
小车初始状态如下图:

当检测到人时:

可以看到,机械臂运动了,当检测到人的时候,机械臂动了。
arm_car_world.launch中添加arm_listener_yolo.py
我们最后一步就是实现全自动,让launch文件来启动arm_listener_yolo.py
代码如下:
<launch>
<!-- 启动Gazebo -->
<include file="$(find arm_car_gazebo)/launch/arm_car_world.launch" />
<!-- 启动Gazebo controllers -->
<include file="$(find arm_car_gazebo)/launch/arm_car_gazebo_controller.launch" />
<!-- 启动darknet_ros的yolo检测-->
<include file="$(find darknet_ros)/launch/darknet_ros.launch">
</include>
<!-- 启动监听订阅yolo检测话题的python --><!---->
<node pkg="arm_car_gazebo" name="arm_listener_yolo" type="arm_listener_yolo.py" output="screen">
</node>
</launch>
最后运行:
roslaunch arm_car_gazebo arm_car_gazebo_control.launch
当我们添加人,yolo检测到人后,机械臂就会自动运动。